
热门标签
热门文章
- 1es 更新指定字段的方法_es更新某个字段
- 2js正则匹配密码:必须包含大写字母、小写字母、数字以及特殊字符_必须包含数字、大小写字母和特殊字符
- 3linux 下 BT Tracker服务器搭建_bterdnk
- 4Docker实战之Dockerfile解析及实战演示,使用环境变量方式改变启动端口_dockerfile port
- 5Jmeter使用技巧(三) : Jmeter调优日志查看方法_jmeter怎么查看日志
- 6启动zookeeper集群失败解决_zk节点启动无法加入集群
- 7寻找有向图的环_输入n条有向路径,求形成的环数
- 8R语言可视化小提琴图(violin plot)、使用vioplot包的vioplot函数可视化小提琴图、lineCol参数自定义小提琴图中的箱图区域线框线条的颜色
- 9ubuntu 安装python3.10
- 10python爬取新浪微博(爬取微博帐号所发内容,不爬取历史内容)_python爬取微博
当前位置: article > 正文
Ubuntu18.04——基于X86和Arm安装并配置Realsense-ros环境_librealsense
作者:笔尖舞者 | 2024-02-04 19:38:49
赞
踩
librealsense
基础安装
1. 安装ROS
2. 安装Realsense驱动以及依赖库
(1)X86安装librealsense
x86系统可以直接下载,不用编译。
更新
sudo apt-get update && sudo apt-get -y upgrade
sudo apt-get install -y --no-install-recommends python3-setuptools python3-pip python3-dev
sudo apt-get install -y libssl-dev libusb-1.0-0-dev pkg-config libgtk-3-dev
sudo apt-get install -y libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
- 1
- 2
- 3
- 4
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key F6E65AC044F831AC80A06380C8B3A55A6F3EFCDE
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u
- 1
- 2
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils
sudo apt-get install librealsense2-dev
- 1
- 2
- 3
python:
pip install pyrealsense2
- 1
(2)Arm编译安装librealsense(或者Apt无法下载的)
编译realsense
sudo apt install -y cmake git
sudo apt-get install -y libusb-1.0-0-dev pkg-config
sudo apt-get install -y libglfw3-dev libgl1-mesa-dev libglu1-mesa-dev
sudo apt-get install openssl libssl-dev
# 如果apt下载失败,使用:
# sudo aptitude install libssl-dev
- 1
- 2
- 3
- 4
- 5
- 6
cd ~/librealsense
mkdir build
cd build
rm -rf *
# 这里可以自行指定自己的python解释器路径,如果你用conda,可以修改为conda对应的路径。
cmake ../ -DFORCE_RSUSB_BACKEND=ON -DBUILD_PYTHON_BINDINGS:bool=true -DPYTHON_EXECUTABLE=/usr/bin/python3
##########################
make -j6
##########################
sudo make install
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
配置环境变量
将pyrealsense写入~/.bashrc中:
sudo vim ~/.bashrc
- 1
写入以下内容:
export PYTHONPATH=$PYTHONPATH:/usr/local/lib:/usr/local/lib/python3.6/pyrealsense2
- 1
- 需要注意的是:如果你在之后的环境中需要使用Conda,需要指定新的环境重新编译。
3. ROS+Realsense环境安装
有两种方式均可:
(1)apt安装
sudo apt-get install ros-melodic-realsense2-camera
sudo apt-get install ros-$ROS_DISTRO-realsense2-description
- 1
- 2
(2)下载本地编译Realsense ros包
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src/
- 1
- 2
在拉取源码之前首先需要确定自己realsense的版本:
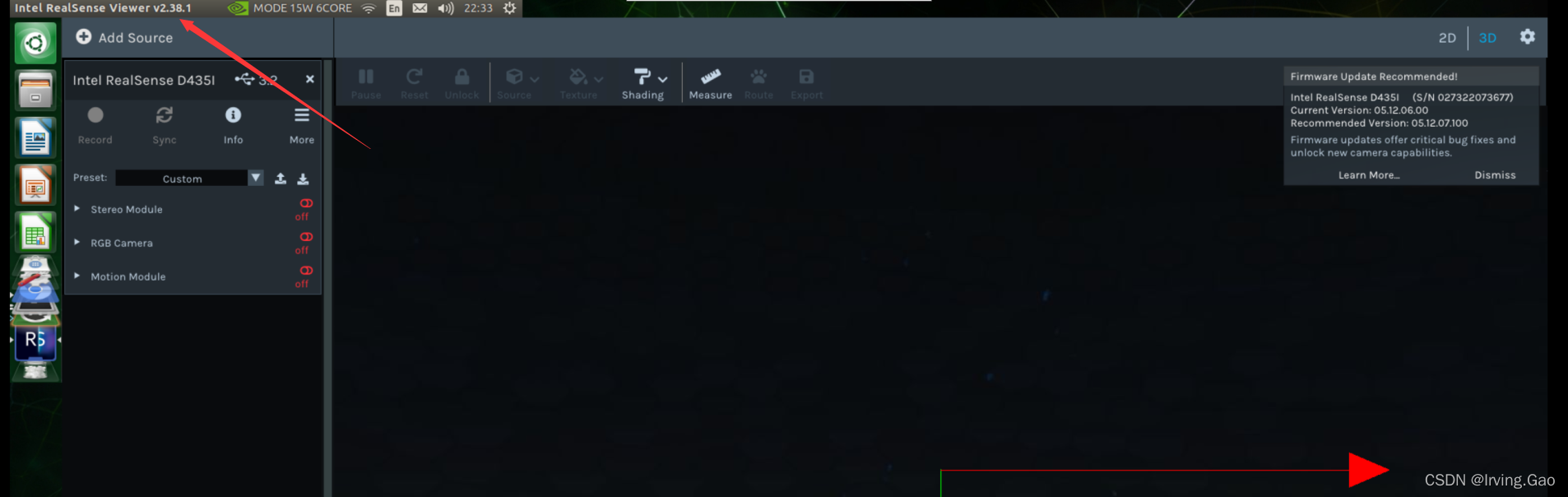
我这里是2.38.1,如果拉去默认的源码,那么它的要求是:
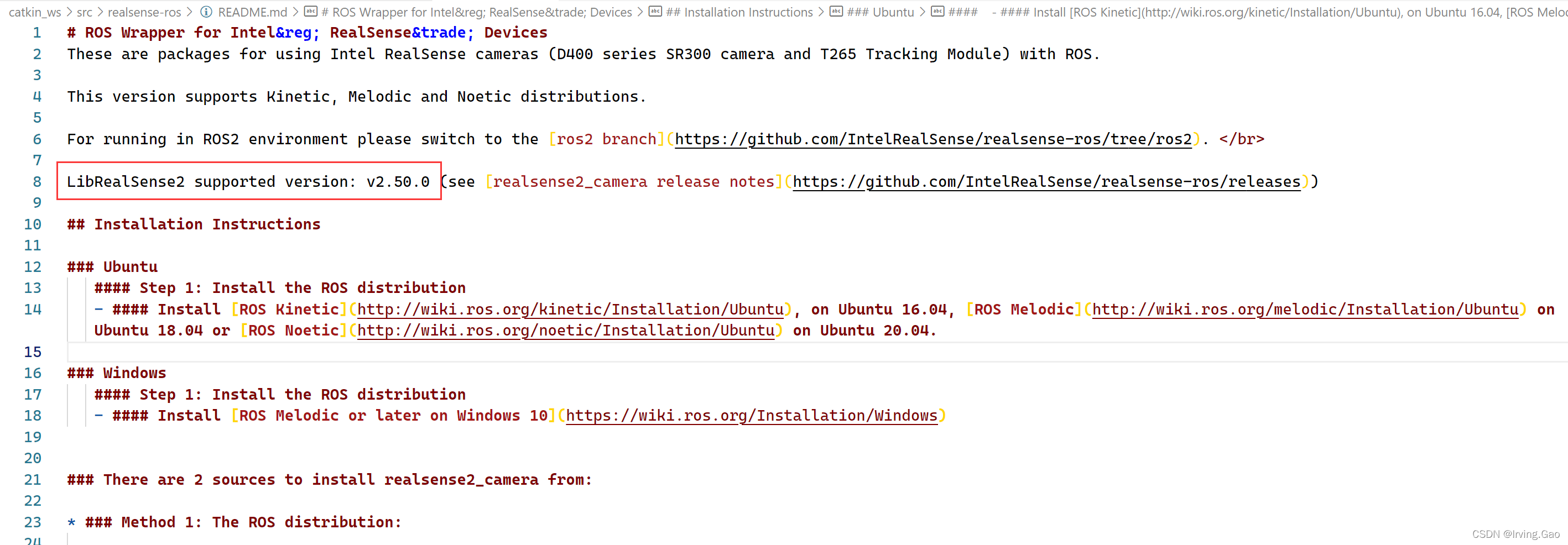
- 如果你的符合要求,则正常编译下载:
git clone https://github.com/IntelRealSense/realsense-ros.git
cd realsense-ros/
git checkout `git tag | sort -V | grep -P "^2.\d+\.\d+" | tail -1`
cd ..
- 1
- 2
- 3
- 4
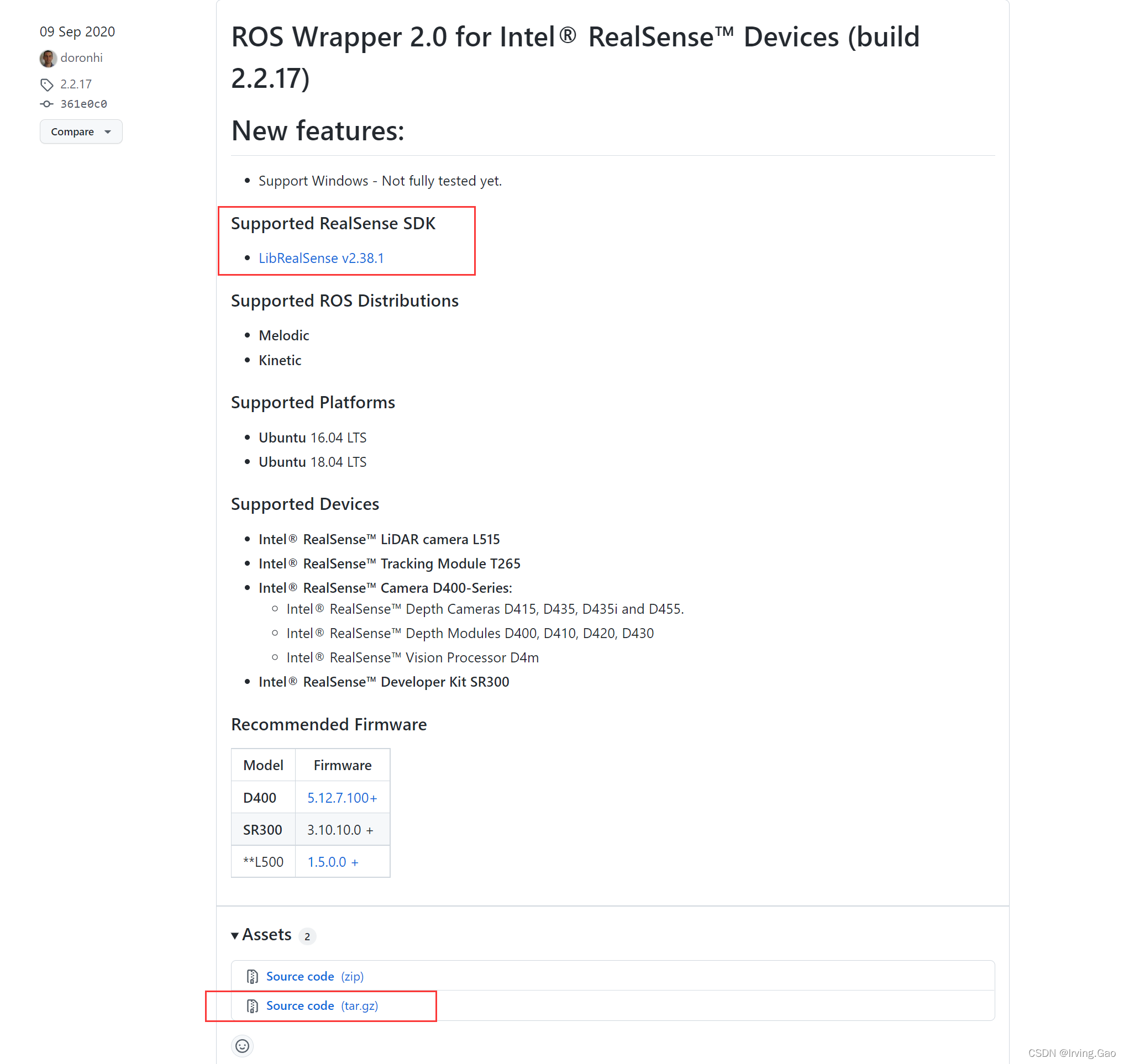
- 如果源码版本大于你的realsense版本,你需要在IntelRealSense/realsense-ros找到与你的realsense固件版本一致的realsense-ros包,我这里例如v2.38.1,则下载对应版本的tar.gz压缩包,下载后解压并将其重命名为
realsense-ros:
catkin_init_workspace
cd ..
catkin_make clean
catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
catkin_make install
- 1
- 2
- 3
- 4
- 5
- 编译报错:
ModuleNotFoundError: No module named 'em'

- 解决方法:
pip install rosdep rosinstall_generator wstool rosinstall six vcstools
pip install empy
- 1
- 2
- 编译报错:
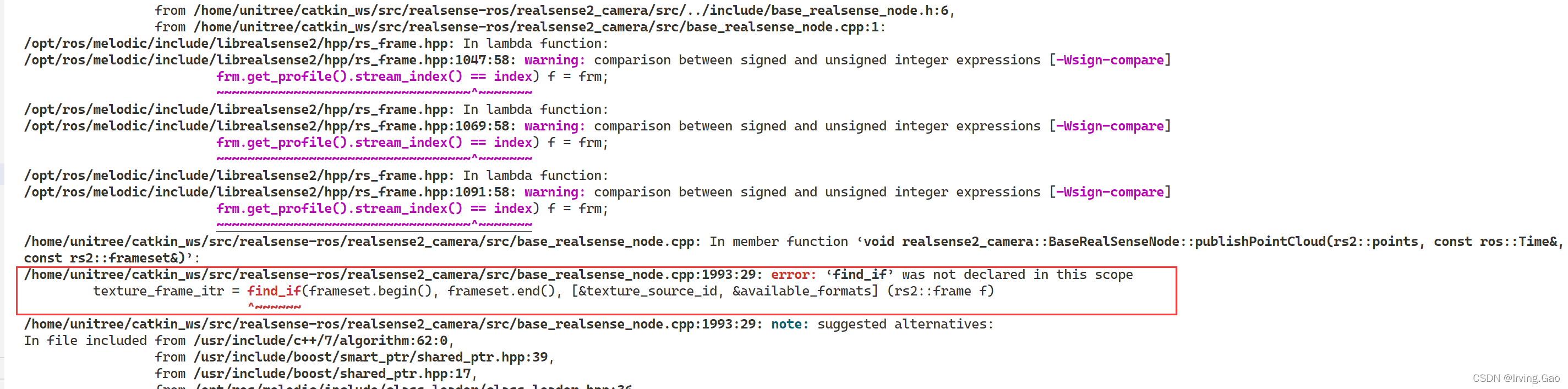
- 解决方法:找到报错位置代码,在前边加上
std::

echo "source ~/catkin_ws/devel/setup.bash" >> ~/.bashrc
source ~/.bashrc
- 1
- 2
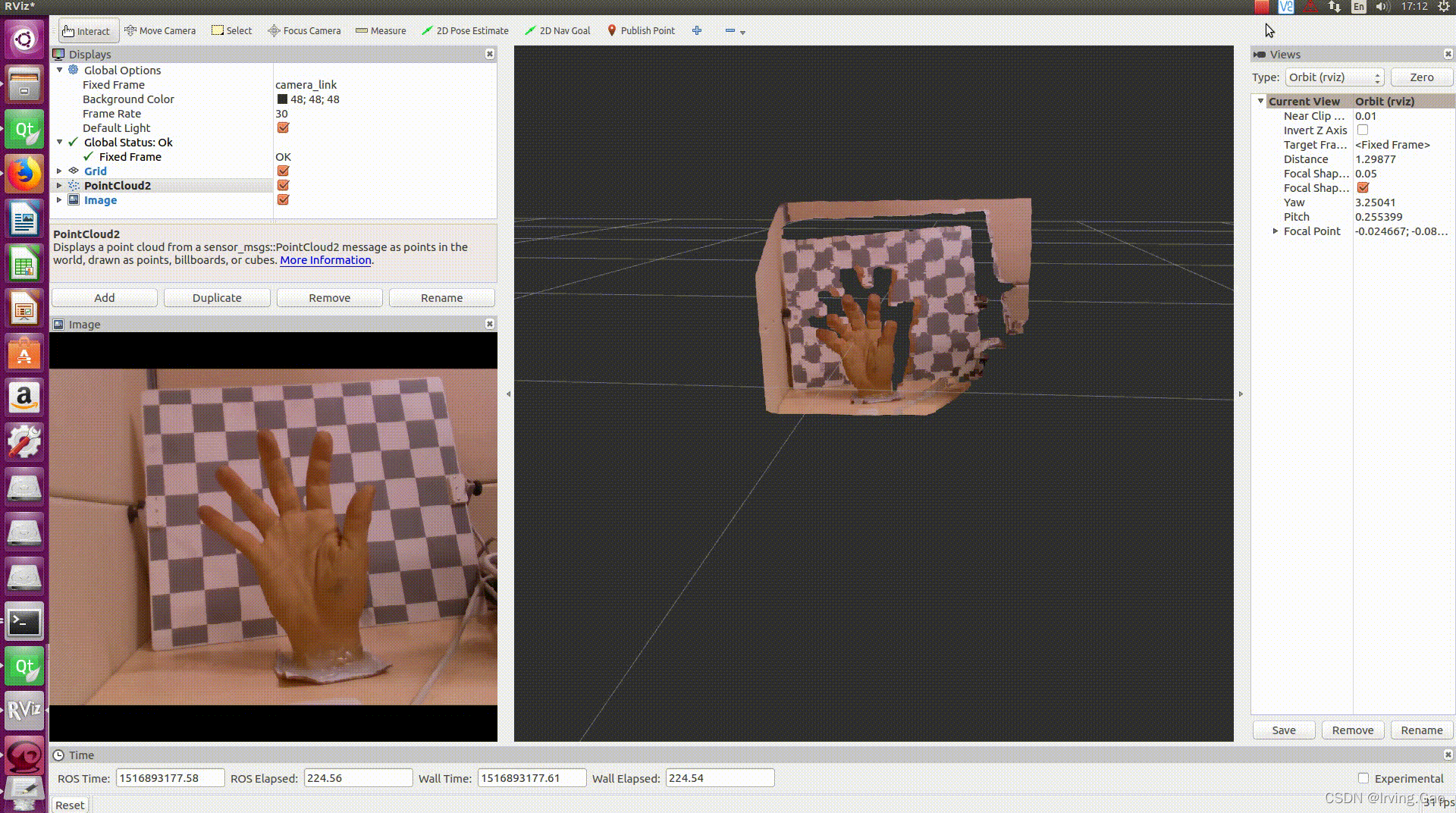
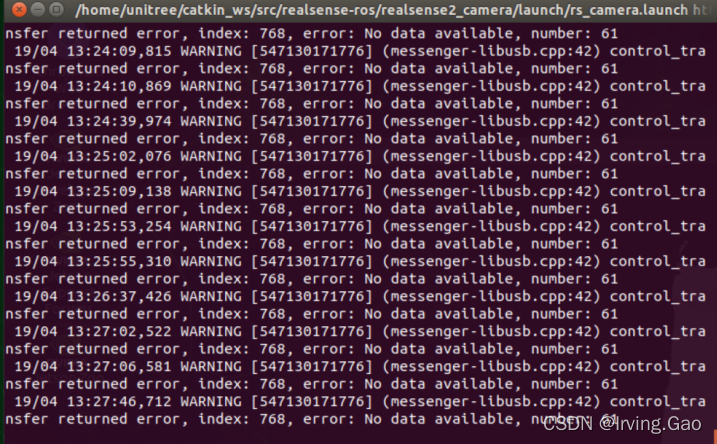
roslaunch realsense2_camera rs_camera.launch
- 1
Demo
参考文章:
环境配置
sudo apt-get install -y ros-melodic-imu-filter-madgwick
sudo apt-get install -y ros-melodic-rtabmap-ros
sudo apt-get install -y ros-melodic-robot-localization
- 1
- 2
- 3
安装octomap-ros:
sudo apt-get install -y ros-melodic-octomap*
- 1
运行
roslaunch realsense2_camera opensource_tracking.launch
- 1

roslaunch realsense2_camera rs_camera.launch filters:=pointcloud
- 1
- Aligned Depth Frames
roslaunch realsense2_camera rs_camera.launch align_depth:=true
- 1
报错解决
- 下面的报错参考解决方法:ORB-SLAM3运行过程记录
卸载方法
移除所有 RealSense™ SDK相关的package:
dpkg -l | grep "realsense" | cut -d " " -f 3 | xargs sudo dpkg --purge
- 1
如果是编译安装的:
cd librealsense/build
sudo make uninstall && make clean
- 1
- 2
参考文章:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59723
推荐阅读
相关标签

