
热门标签
热门文章
- 1K8S 日志方案
- 2(附源码)springboot学生宿舍管理系统 毕业设计 211955_宿舍管理系统毕业设计
- 3【Linux】Linux之间如何互传文件(详细讲解)_linux把文件传到另一个linux
- 4JavaScript鼠标拖动事件监听使用方法及实例效果_监听鼠标移动
- 5【Elasticsearch篇】详解使用RestClient操作索引库的相关操作
- 6【Python】01快速上手爬虫案例一
- 7深度学习算法应用实战 | 利用 CLIP 模型进行“零样本图像分类”
- 8【C++进阶1--继承】面向对象三大特性之一(附菱形继承讲解
- 9qml学习----------------(progressBar)进度条的学习_qml progress bar 横向为纵向
- 10【Python】文件操作中的a,a+,w,w+几种方式的区别_转_python a+
当前位置: article > 正文
树莓派调用RealSense D415 和 realsense-ros源码安装_树莓ubuntu realsense
作者:思考机器 | 2024-02-04 18:32:33
赞
踩
树莓ubuntu realsense
树莓派4B Ubuntu server 20.04 LTS
远程桌面访问
1.下载RealSense SDK
https://github.com/IntelRealSense/librealsense可以git clone 也可以直接下zip
2.编译
- cd librealsense-master
- sudo mkdir build
- cd build
- cmake ../ -DCMAKE_BUILD_TYPE=Release -DBUILD_EXAMPLES=true -DFORCE_RSUSB_BACKEND=ON -DBUILD_WITH_TM2=false -DIMPORT_DEPTH_CAM_FW=false
-
- sudo make uninstall && make clean && make && sudo make install
3.设置udev规则
- cd librealsense
- sudo ./scripts/setup_udev_rules.sh
会提示我们先拔掉再插上,让他识别。
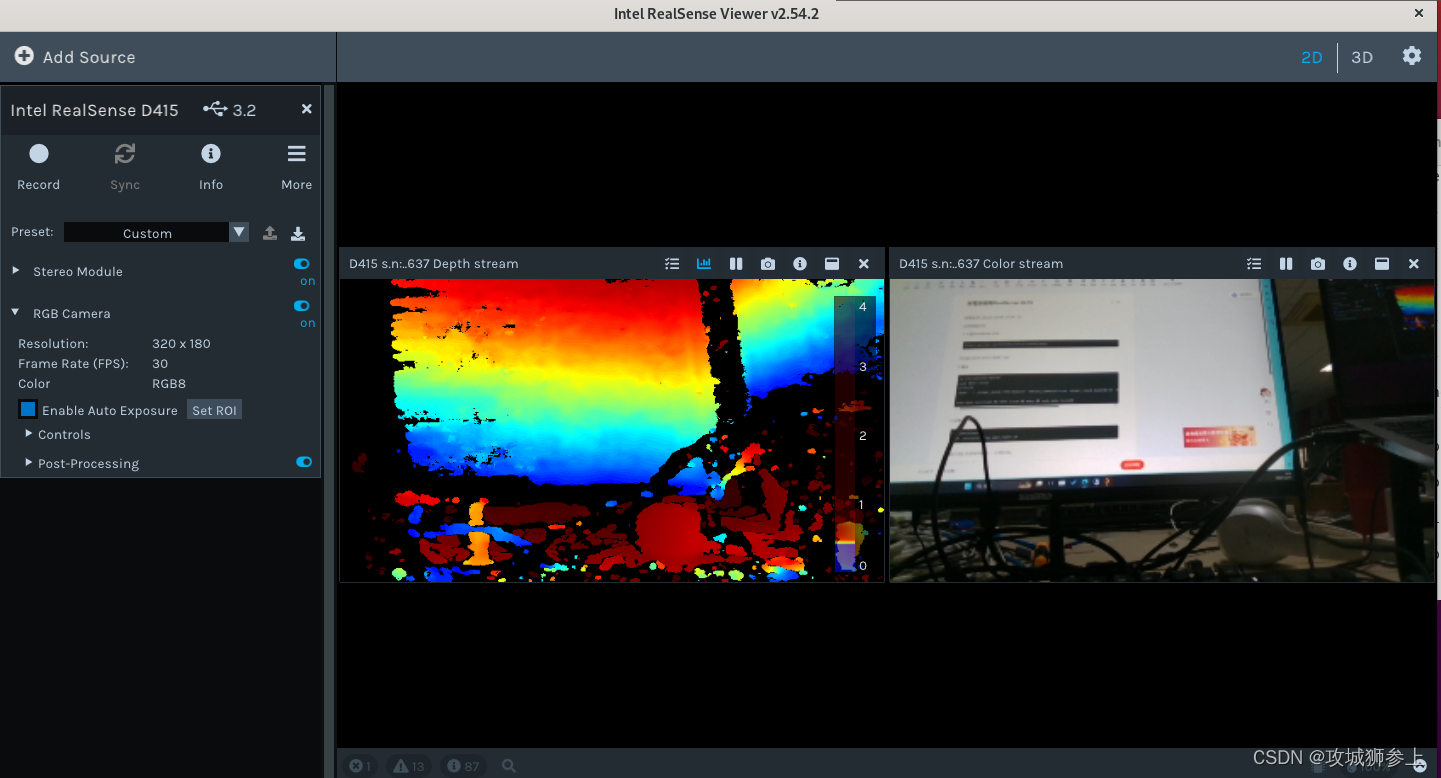
4.调用RGB-D415
realsense-viewer
跳出来的窗口左边打开开关就能看到效果。
ROS接口:
我选择的是源码安装realsense-ros:
github上下载指定版本
git clone -b 2.2.7 https://github.com/IntelRealSense/realsense-ros.git需要多试几次
然后直接在catkin_ws执行catkin_make
之前执行catkin_make会报错contains non-catkin packages,指定版本下载后就没了。
报错:

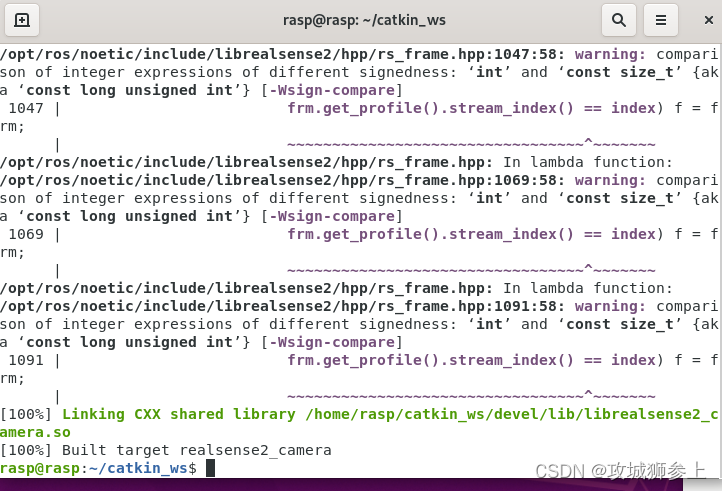
去对应的find_if 前面加上std::
改好之后删掉build和devel重新catkin_make就成功了
测试
source ~/catkin_ws/devel/setup.bash
之后执行命令:
roslaunch realsense2_camera rs_camera.launch
_ZN20ddynamic_reconfigure19DDynamicReconfigureC1ERKN3ros10NodeHandleE
网上说原因是安装了两次ddynamic_reconfigure,需要卸载经由apt-get下载的包,因为我后来这个也换成源码安装了
sudo apt-get remove ros-noetic-ddynamic-reconfigure确实卸载掉了,卸载之后重新编译,再次roslaunch成功
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59597
推荐阅读
相关标签

