
热门标签
热门文章
- 1实时监听数据库变化_mysql监听数据变化
- 2微信小程序页面跳转:wx.switchTab、wx.reLaunch、wx.redirectTo、wx.navigateTo、wx.navigateBack的使用和区别
- 3消息队列Kafka入门介绍---环境搭建_卡夫卡队列 安装教程
- 4WEB前端知识总结
- 5java 枚举 命名规范_JAVA命名规范
- 6服务器iis如何开启tlsv1.2协议,利用IIS Crypto V3.2开启IIS服务器TLS1.2的具体操作流程...
- 7TortoiseSVN学习--检出、提交、更新、冲突及解决、锁定与解锁_svn你必须先更新工作副本
- 8xgboost 多分类(六段age predict)_xgb多分类
- 9可解释机器学习-shap value的使用
- 10Unity在XR设备中获取手柄的按键信息_unity openxr primarybutton
当前位置: article > 正文
Intel RealSense T265鱼眼相机图像获取并矫正畸变(Unity)_realsense相机畸形矫正
作者:编程领航者 | 2024-02-04 18:37:34
赞
踩
realsense相机畸形矫正
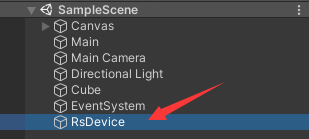
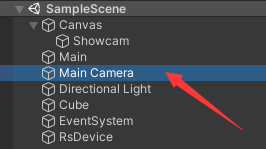
1.添加RsDevice:
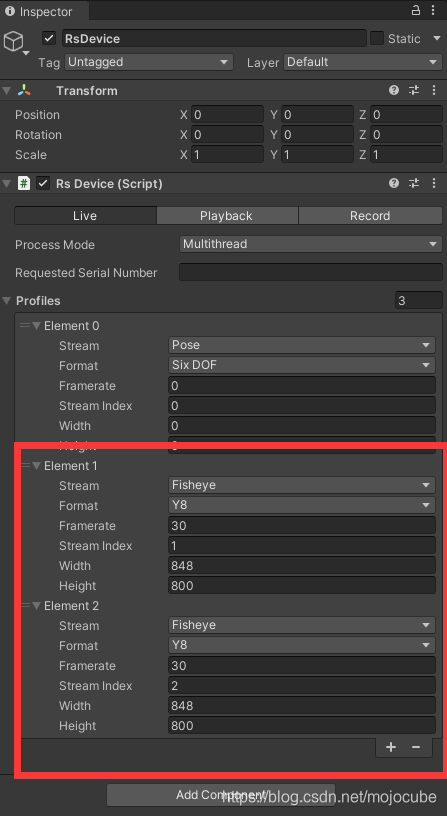
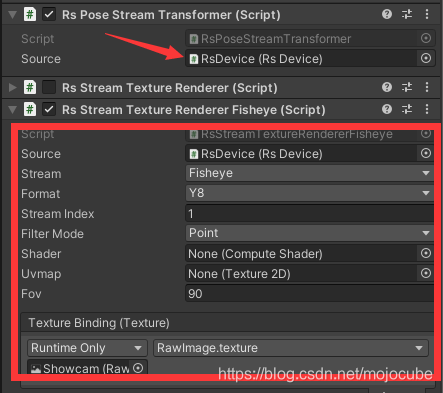
2.设置开启鱼眼相机:
3.新建RsStreamTextureRendererFisheye.cs和Fisheye.shader:
- using Intel.RealSense;
- using System;
- using System.Collections;
- using System.Collections.Generic;
- using System.Runtime.InteropServices;
- using System.Threading;
- using UnityEngine;
- using UnityEngine.Events;
-
- public class RsStreamTextureRendererFisheye : MonoBehaviour
- {
- private static TextureFormat Convert(Format lrsFormat)
- {
- switch (lrsFormat)
- {
- case Format.Z16: return TextureFormat.R16;
- case Format.Disparity16: return TextureFormat.R16;
- case Format.Rgb8: return TextureFormat.RGB24;
- case Format.Rgba8: return TextureFormat.RGBA32;
- case Format.Bgra8: return TextureFormat.BGRA32;
- case Format.Y8: return TextureFormat.Alpha8;
- case Format.Y16: return TextureFormat.R16;
- case Format.Raw16: return TextureFormat.R16;
- case Format.Raw8: return TextureFormat.Alpha8;
- case Format.Disparity32: return TextureFormat.RFloat;
- case Format.Yuyv:
- case Format.Bgr8:
- case Format.Raw10:
- case Format.Xyz32f:
- case Format.Uyvy:
- case Format.MotionRaw:
- case Format.MotionXyz32f:
- case Format.GpioRaw:
- case Format.Any:
- default:
- throw new ArgumentException(string.Format("librealsense format: {0}, is not supported by Unity", lrsFormat));
- }
- }
-
- private static int BPP(TextureFormat format)
- {
- switch (format)
- {
- case TextureFormat.ARGB32:
- case TextureFormat.BGRA32:
- case TextureFormat.RGBA32:
- return 32;
- case TextureFormat.RGB24:
- return 24;
- case TextureFormat.R16:
- return 16;
- case TextureFormat.R8:
- case TextureFormat.Alpha8:
- return 8;
- default:
- throw new ArgumentException("unsupported format {0}", format.ToString());
-
- }
- }
-
- public RsFrameProvider Source;
-
- [System.Serializable]
- public class TextureEvent : UnityEvent<Texture> { }
-
- public Stream _stream;
- public Format _format;
- public int _streamIndex;
-
- public FilterMode filterMode = FilterMode.Point;
-
- protected Texture2D texture;
-
- public ComputeShader shader;
-
- public Texture2D uvmap;
-
- [Delayed]
- public float fov = 90;
-
- [Space]
- public TextureEvent textureBinding;
-
- FrameQueue q;
- Predicate<Frame> matcher;
-
- void Start()
- {
- Source.OnStart += OnStartStreaming;
- Source.OnStop += OnStopStreaming;
- }
-
- void OnDestroy()
- {
- if (texture != null)
- {
- Destroy(texture);
- texture = null;
- }
-
- if (q != null)
- {
- q.Dispose();
- }
- }
-
- protected void OnStopStreaming()
- {
- Source.OnNewSample -= OnNewSample;
- if (q != null)
- {
- q.Dispose();
- q = null;
- }
- }
-
- public void OnStartStreaming(PipelineProfile activeProfile)
- {
- q = new FrameQueue(1);
- matcher = new Predicate<Frame>(Matches);
- Source.OnNewSample += OnNewSample;
- }
-
- private bool Matches(Frame f)
- {
- using (var p = f.Profile)
- return p.Stream == _stream && p.Format == _format && p.Index == _streamIndex;
- }
-
- void OnNewSample(Frame frame)
- {
- try
- {
- if (frame.IsComposite)
- {
- using (var fs = frame.As<FrameSet>())
- using (var f = fs.FirstOrDefault(matcher))
- {
- if (f != null)
- q.Enqueue(f);
- return;
- }
- }
-
- if (!matcher(frame))
- return;
-
- using (frame)
- {
- q.Enqueue(frame);
- }
- }
- catch (Exception e)
- {
- Debug.LogException(e);
- // throw;
- }
-
- }
-
- bool HasTextureConflict(VideoFrame vf)
- {
- return !texture ||
- texture.width != vf.Width ||
- texture.height != vf.Height ||
- BPP(texture.format) != vf.BitsPerPixel;
- }
-
- protected void LateUpdate()
- {
- if (q != null)
- {
- VideoFrame frame;
- if (q.PollForFrame<VideoFrame>(out frame))
- using (frame)
- ProcessFrame(frame);
- }
- }
-
- private void ProcessFrame(VideoFrame frame)
- {
- if (HasTextureConflict(frame))
- {
- if (texture != null)
- {
- Destroy(texture);
- }
-
- using (var p = frame.Profile)
- {
- bool linear = (QualitySettings.activeColorSpace != ColorSpace.Linear)
- || (p.Stream != Stream.Color && p.Stream != Stream.Infrared);
- texture = new Texture2D(frame.Width, frame.Height, Convert(p.Format), false, linear)
- {
- wrapMode = TextureWrapMode.Clamp,
- filterMode = filterMode
- };
- }
-
- textureBinding.Invoke(texture);
- }
-
- texture.LoadRawTextureData(frame.Data, frame.Stride * frame.Height);
- texture.Apply();
-
- if (uvmap == null)
- {
- CreateUvMap(frame);
- Shader.SetGlobalTexture("_UVMap", uvmap);
- }
- }
-
- static Vector2Int Undistort(float x, float y, ref Intrinsics intrin, int W, int H, float fov)
- {
- var uv = new Vector2(x / W * intrin.width, y / H * intrin.height);
-
- // see https://github.com/IntelRealSense/librealsense/blob/master/include/librealsense2/rsutil.h
- uv.x = (uv.x - intrin.ppx) / intrin.fx;
- uv.y = (uv.y - intrin.ppy) / intrin.fy;
-
- float rd = uv.magnitude;
- float theta = rd;
- float theta2 = rd * rd;
-
- for (int i = 0; i < 4; i++)
- {
- float f = theta * (1 + theta2 * (intrin.coeffs[0] + theta2 * (intrin.coeffs[1] + theta2 * (intrin.coeffs[2] + theta2 * intrin.coeffs[3])))) - rd;
- float df = 1 + theta2 * (3 * intrin.coeffs[0] + theta2 * (5 * intrin.coeffs[1] + theta2 * (7 * intrin.coeffs[2] + 9 * theta2 * intrin.coeffs[3])));
- theta -= f / df;
- theta2 = theta * theta;
- }
- float r = Mathf.Tan(theta);
- uv *= r / rd;
-
- // see https://github.com/IntelRealSense/librealsense/blob/master/wrappers/python/examples/t265_stereo.py
- float stereo_fov_rad = fov * (Mathf.PI / 180);
- float stereo_height_px = H;
- float stereo_focal_px = stereo_height_px / 2 / Mathf.Tan(stereo_fov_rad / 2);
- uv = uv * stereo_focal_px + Vector2.one * (stereo_height_px - 1f) / 2f;
-
- uv += Vector2.one * 0.5f;
- return Vector2Int.RoundToInt(uv);
- }
-
- private void CreateUvMap(VideoFrame frame)
- {
- const int W = 848, H = 800;
-
- if (uvmap)
- DestroyImmediate(uvmap);
- uvmap = new Texture2D(W, H, TextureFormat.RGFloat, false, true)
- {
- filterMode = FilterMode.Point,
- wrapMode = TextureWrapMode.Clamp
- };
- using (var profile = frame.Profile.As<VideoStreamProfile>())
- {
- var intrinsics = profile.GetIntrinsics();
- Debug.Log(intrinsics);
-
- var uvs = new Vector2[H, W];
-
- // see https://github.com/IntelRealSense/librealsense/blob/master/src/proc/align.cpp
- for (int y = 0; y < H; ++y)
- {
- for (int x = 0; x < W; ++x)
- {
- var uv = Undistort(x - 0.5f, y - 0.5f, ref intrinsics, W, H, fov);
- var uv1 = Undistort(x + 0.5f, y + 0.5f, ref intrinsics, W, H, fov);
-
- if (uv.x < 0 || uv.y < 0 || uv1.x >= W || uv1.y >= H)
- continue;
-
- float u = (float)x / W;
- float v = (float)y / H;
-
- for (int j = uv.y; j <= uv1.y; ++j)
- {
- for (int i = uv.x; i <= uv1.x; ++i)
- {
- uvs[j, i].Set(u, v);
- }
- }
- }
- }
-
- var h = GCHandle.Alloc(uvs, GCHandleType.Pinned);
- uvmap.LoadRawTextureData(h.AddrOfPinnedObject(), W * H * 2 * sizeof(float));
- uvmap.Apply();
- h.Free();
- }
- }
- }

Fisheye.shader:
- Shader "Custom/Fisheye" {
- Properties {
- _MainTex ("MainTex", 2D) = "white" {}
- _Gamma ("Gamma", float) = 0.45
- }
- SubShader {
- Tags { "QUEUE"="Transparent" "IGNOREPROJECTOR"="true" "RenderType"="Transparent" "PreviewType"="Plane" }
-
- Pass {
- ZWrite Off
- Cull Off
- Fog { Mode Off }
-
- ColorMask RGB
-
- CGPROGRAM
- #pragma vertex vert_img
- #pragma fragment frag
- #pragma target 3.0
- #pragma glsl
-
- #include "UnityCG.cginc"
-
- sampler2D _MainTex;
- uniform sampler2D _UVMap;
- float _Gamma;
-
-
- half4 frag (v2f_img pix) : SV_Target
- {
- float2 uv = pix.uv;
- float2 uvmap = tex2D(_UVMap, uv).xy;
- float Y = pow(tex2D(_MainTex, uvmap).a, _Gamma);
- return float4(Y.rrr, 1);
- }
- ENDCG
-
- }
- }
- FallBack Off
- }
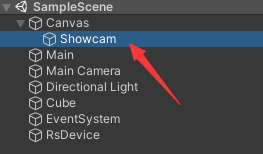
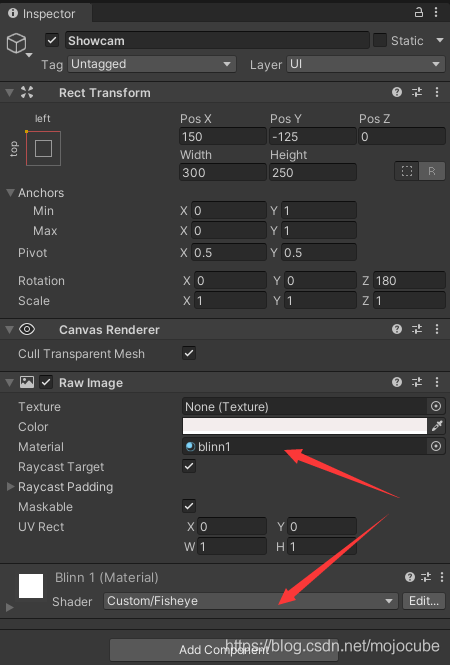
4.新建Raw Image以便显示相机图像:
设置材质球和着色器:
5.绑定相机:
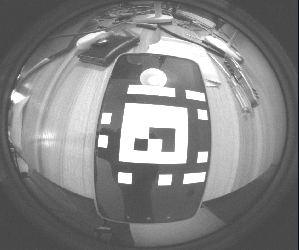
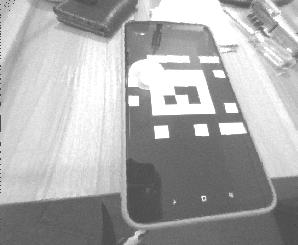
这样,就可以显示正常相机图像,下面看看矫正前后对比:
矫正前:
矫正后:
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59606
推荐阅读
相关标签

