
使用 RealSense T265录制bag
赞
踩
1、安装驱动。(很多教程,自搜)
2、终端运行realsense-viewer,里面自带record但是最后bag里imu格式不对,放弃。
3、使用rosbag录制。
一、安装好ros空间
二、修改rs_t265.launch文件,位置在/home/liubo/realsense_ws/src/realsense-ros/realsense2_camera/launch
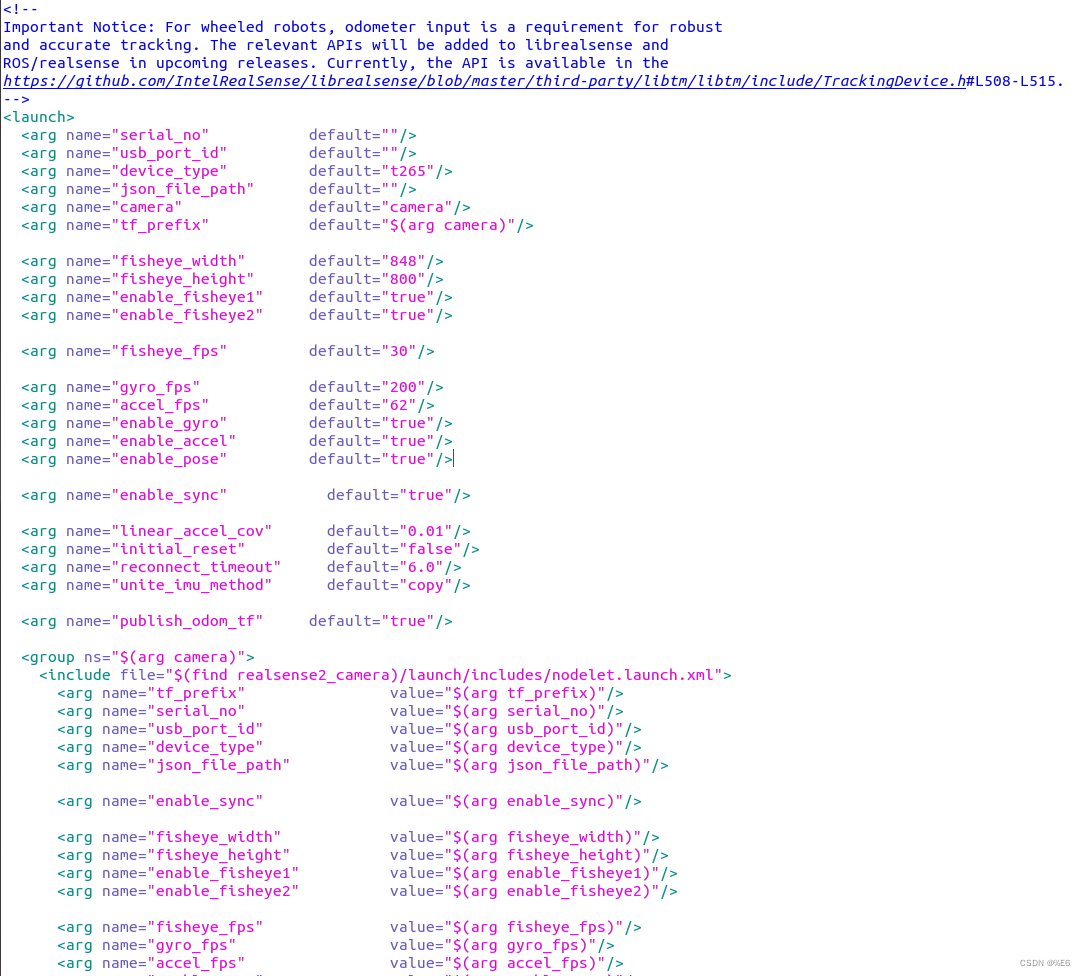
修改<arg name="unite_imu_method" default="copy"/>可以将IMU信息合并,默认合并后的topic 为/camera/imu
三、开始准备录制
cd realsense_ws/
source devel/setup.bash
roslaunch realsense2_camera demo_t265.launch #运行相机,自动打开rviz,可以ADD topic,观察左右目和IMU图像信息
rosrun topic_tools throttle messages /camera/imu 200.0 /imu #将/camera/imu话题定为200hz且 改名为 /imu
rosrun topic_tools throttle messages /camera/fisheye1/image_raw 20.0 /fisheye1 #将/camera/fisheye1/image_raw话题定为20hz且 改名为 /fisheye1
rosrun topic_tools throttle messages /camera/fisheye2/image_raw 20.0 /fisheye2 #将/camera/fisheye2/image_raw话题定为20hz且 改名为 /fisheye2
osbag record -O test /fisheye1 /fisheye2 /imu #指定三个话题开始录制名为test的包,位置在打开终端的文件夹里。
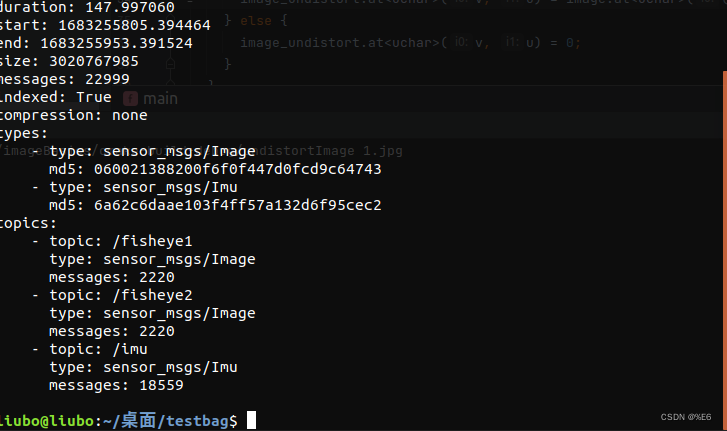
四、录制完毕可以使用rosbag info -y test.bag 查看话题和录制数量。
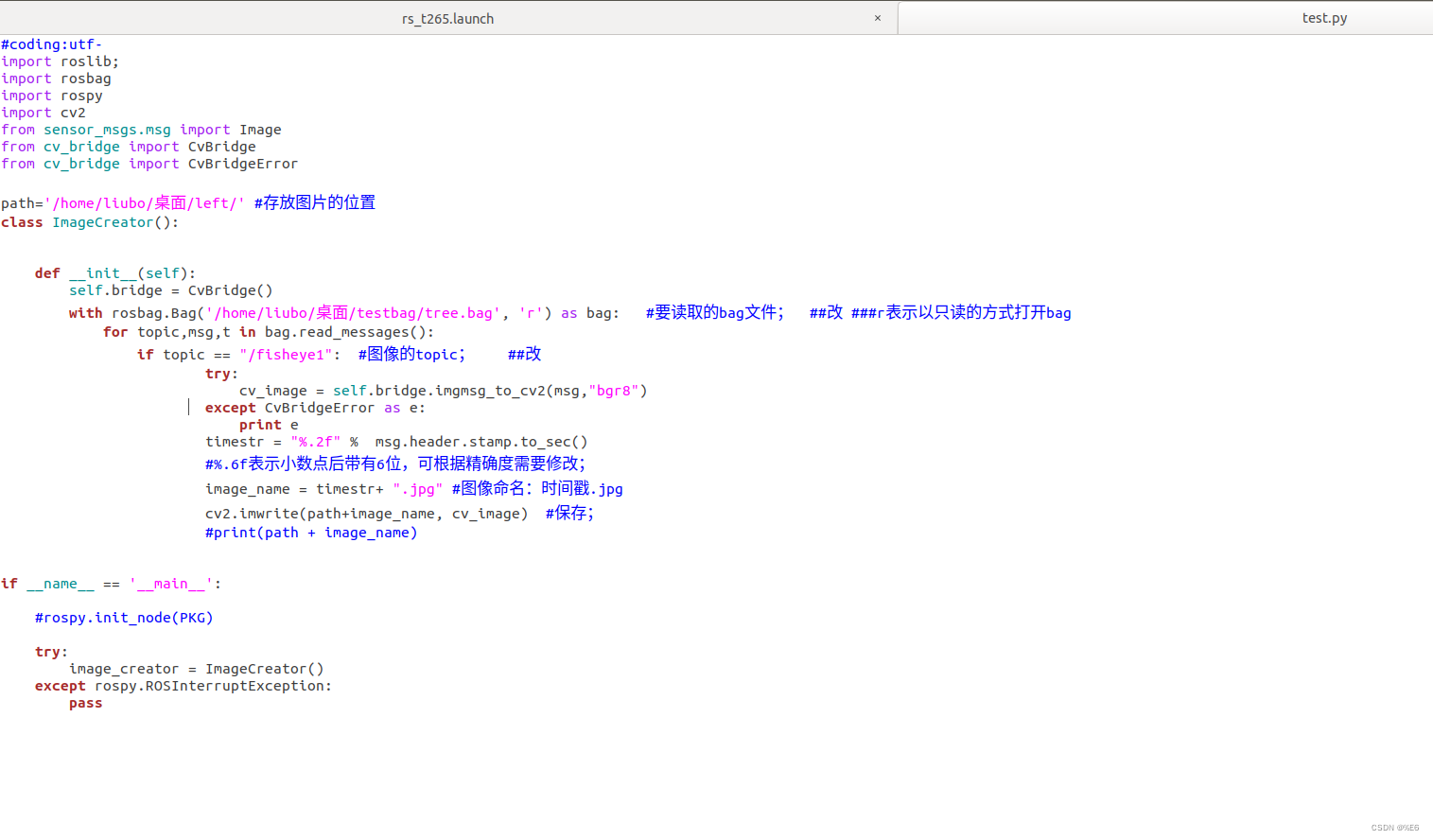
五、处理bag
运行 python test.py拆包
其中一张左目图像为:
自行加入内参fx,fy,cx,cy,k1-k4,(可以使用kalibr进行标定得到)进行去畸变处理:(参考了十四讲CH5将畸变公式改成鱼眼相机的)
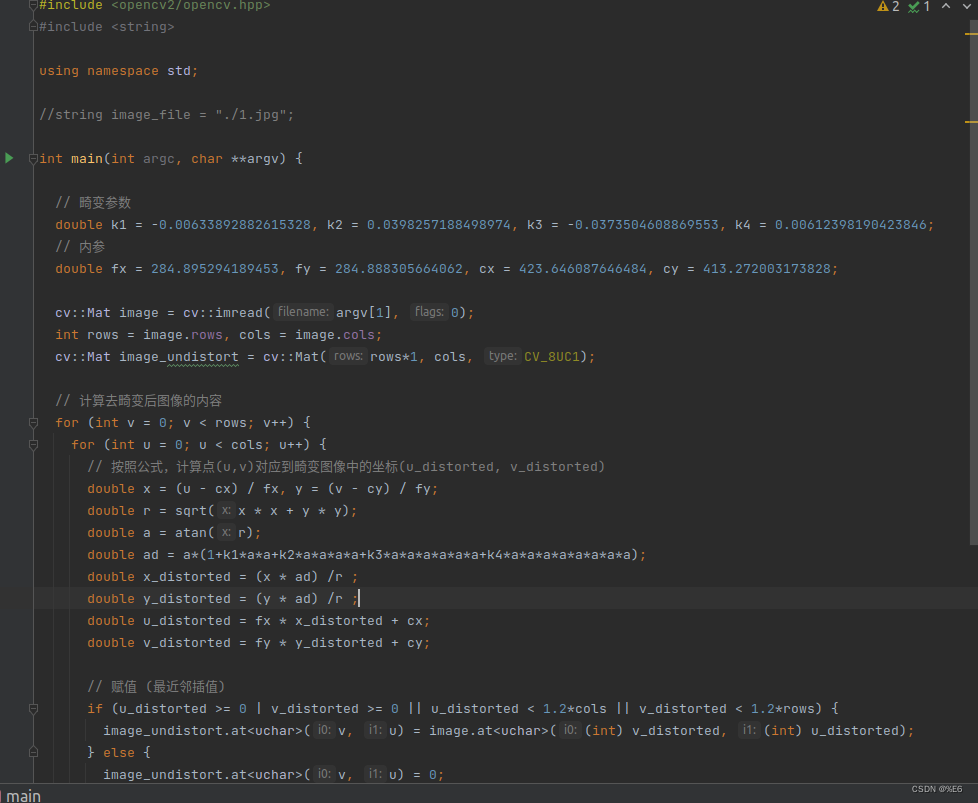
结果: 

