
热门标签
热门文章
- 1Vue 登录权限配置_vue3登录游客登录和管理员登录
- 2STM32_PWM呼吸灯_stm32pwm的呼吸灯设计总结
- 3python网球比赛模拟_2019-05-12 Python之模拟体育竞赛
- 4如何理解期权的保证金和权利金的区别?
- 5python做应用程序错误_pythonw.exe应用程序错误
- 6Python+Selenium详解(超全)_selenium,python
- 7云服务器搭载zookeeper集群遇到的坑,java.net.BindExxeption和java.net.SoketTimeoutException_quorumlistenonallips=true
- 8提取数据_python pdf文件提取表格数据
- 9【联邦学习+区块链】TORR: A Lightweight Blockchain for Decentralized Federated Learning_federated learning blockchain call for paper
- 10【编程入门题--二维数组的转置】
当前位置: article > 正文
基于stm32f103c8t6的智能小车_stm32f103c8t6小车
作者:思考机器 | 2024-01-30 12:30:01
赞
踩
stm32f103c8t6小车
学了stm32后,自己动手完成一辆智能小车的制作,主要内容有5步进电机驱动、路灰度循迹、舵机控制等。
目录

所用到的硬件有:
- stm32f103c8t6单片机
- 5路数字灰度传感器模块
- 42步进电机
- LV8731V步进电机驱动模块
首先是如何驱动步进电机
步进电机驱动方法
最基本的方法有3种,单4拍法、双4拍法、单双8拍法。但我们在这里不细讲,只讲我们怎么做能让步进电机动起来。
要想让步进电机动起来,关键是要给它脉冲信号。我们可以通过PWM来输出脉冲信号,当然我们可以用更简单的for循环+GPIO高低电平+延时实现脉冲信号的输出以驱动步进电机。
我们现在采用的思路是更简单的后者。
代码编写:
- void Car_Go()
- {
- GPIO_WriteBit(MOTOR_GPIO_PORT, DA, Bit_RESET); //DA表示电机A的方向引脚,使用时,我这边是置低电平为前进方向
- GPIO_WriteBit(MOTOR_GPIO_PORT, DB, Bit_SET); //大家可根据自己的实际情况调整电机转动方向
- GPIO_WriteBit(MOTOR_GPIO_PORT, DC, Bit_SET);
- GPIO_WriteBit(MOTOR_GPIO_PORT, DD, Bit_RESET);
- for (int a=0;a<500;a++)
- {
- GPIO_WriteBit(MOTOR_GPIO_PORT, VA, Bit_SET); //VA表示电机A的速度引脚
- GPIO_WriteBit(MOTOR_GPIO_PORT, VB, Bit_SET); //需要置高电平一段时间再置为低电平一段时间以输出脉冲信号
- GPIO_WriteBit(MOTOR_GPIO_PORT, VC, Bit_SET);
- GPIO_WriteBit(MOTOR_GPIO_PORT, VD, Bit_SET);
- delay(2); //延时2ms
- GPIO_WriteBit(MOTOR_GPIO_PORT, VA, Bit_RESET);
- GPIO_WriteBit(MOTOR_GPIO_PORT, VB, Bit_RESET);
- GPIO_WriteBit(MOTOR_GPIO_PORT, VC, Bit_RESET);
- GPIO_WriteBit(MOTOR_GPIO_PORT, VD, Bit_RESET);
- delay(2); //延时2ms
- }
- }

延时函数可这样写:
- void delay(int n)
- {
- volatile int i;
- while (n--)
- {
- i = 12000;
- while (i--);
- }
- }
电机驱动板的接线
LV8731V驱动接线相对来说,比较简单,直接按照对应的接线端口插上去即可。如图:


使能驱动
现在要想让电机动起来还需要使能我们的LV8731V驱动板,也就要给驱动板上的ST引脚置高电平。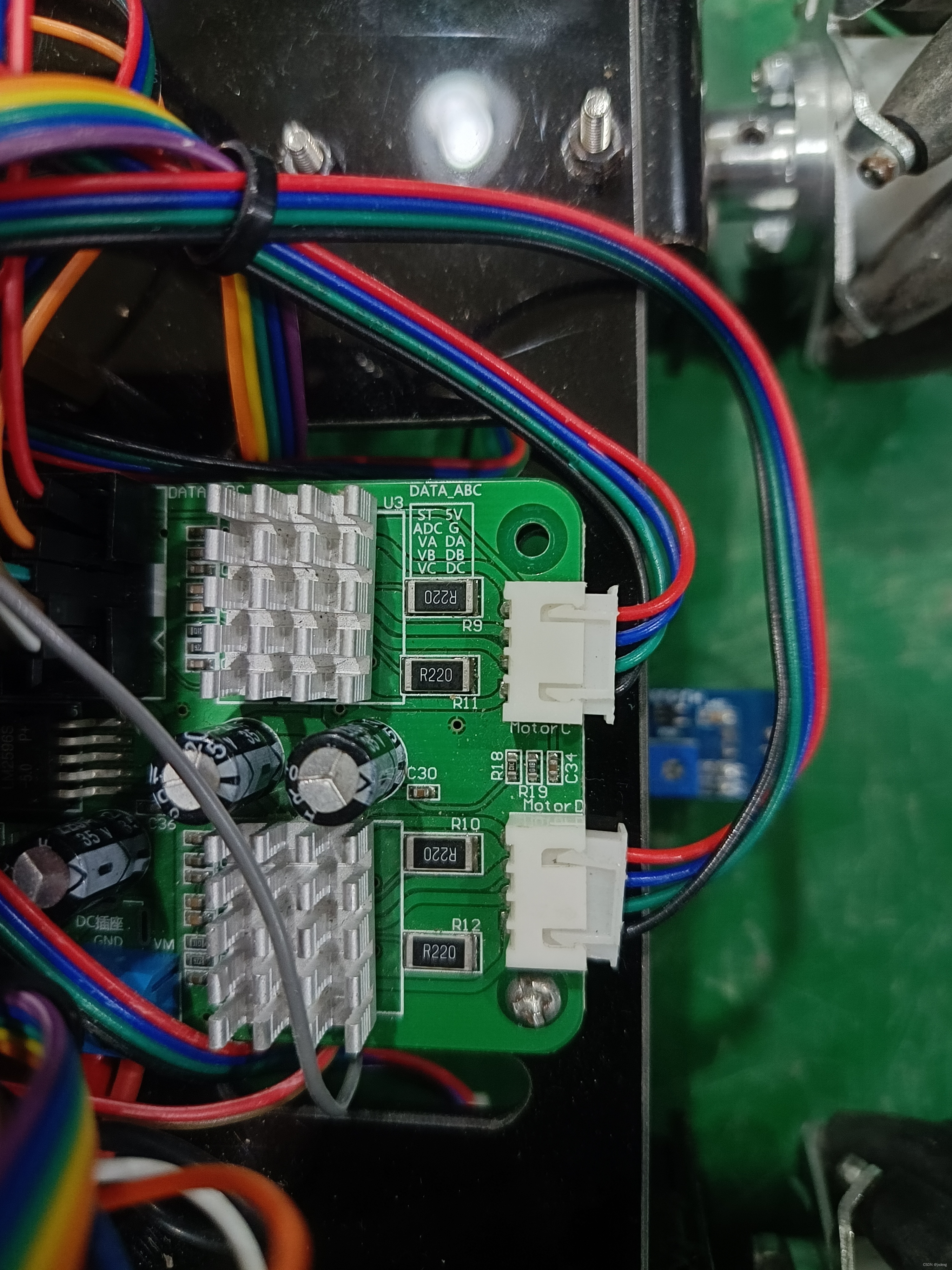
5路灰度传感器工作原理
其实很简单 未碰到黑线(红灯亮):对应引脚状态 = 0
碰到黑线(红灯灭):对应引脚状态 = 1
循迹逻辑
当小车向偏右离(黑线)时,左侧循迹红灯灭,引脚状态为1,表示车辆向右偏离黑线,车辆需要向左行驶以调整车辆沿着黑线行驶。
代码编写:
- void Find(void)
- {
-
-
- if(L2==0&&L1==0&&M!=0&&R1==0&&R2==0&&S==0) //左右都没有检测到黑线
- {
- Car_Go();
- }
-
- else if(L2!=0&&L1==0&&R1==0&&R2==0) //左边检测到黑线
- {
- Car_Turn_Left();
- }
- else if(L2==0&&L1!=0&&R1==0&&R2==0) //左边检测到黑线
- {
- Car_Turn_Left();
- }
-
- else if(L2==0&&L1==0&&R1!=0&&R2==0) //右边检测到黑线
- {
- Car_Turn_Right();
- }
- else if(L2==0&&L1==0&&R1==0&&R2!=0) //右边检测到黑线
- {
- Car_Turn_Right();
-
- }
- else if(L2!=0&&L1!=0&&R1!=0&&R2!=0)
- {
- Car_Go();
- }
- else if(L2==0&&L1==0&&M==0&&R1==0&&R2==0)
- {
-
- }
-
- else
- {
- Car_Go();
- }
- }
舵机控制方面呢,我们下次再讲^-^
总结
本次项目主要运用到的知识:GPIO的使用,delay延时函数的编写,利用for循环驱动步进电机,读取IO口引脚状态,if分支语句判断循迹状态。
最后,感谢大家的阅读,祝大家学习愉快。
如有错误,敬请斧正~
编写不易,多多支持~
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46457
推荐阅读
相关标签

