
热门标签
热门文章
- 1面向对象和面向过程-学习笔记_面相对象和面向过程
- 2volatile 关键字的三大特点【数据可见性、指令禁止重排性、不保证操作原子性】_volidate关键字三大特性
- 3本地websocket服务端暴露至公网访问【cpolar内网穿透】
- 4计算机网络原理 谢希仁(第8版)第四章习题答案_计算机网络第八版谢希仁课后答案
- 5C# 小练习(简单)-合集_c#编程题
- 6Java LeetCode篇-深入了解关于单链表的经典解法
- 7Go语言学习(3)_如何一次性声明多个全局变量【在go中函数外声明的变量,就是全局变量】
- 8python200行有趣小程序,python简单小游戏代码_python小程序200例
- 9已解决mysql报错ERROR 1049 (42000): Unknown database ‘数据库‘_error 1049 (42000): unknown database 'mysql
- 10铭飞获取幻灯片栏目下的图片
当前位置: article > 正文
避障小车学习2___hal_tim_get_compare
作者:代码创新者 | 2024-01-30 11:57:50
赞
踩
__hal_tim_get_compare
目录
一 超声波
用输入捕获的方法,原理:先设置输入捕获为上升沿检测,记录发生上升沿时TIMx_CNT的值。然后配置捕获信号为下降沿捕获,当下降沿到来的时候发生捕获,并记录此时的TIMx_CNT的值。这样,前后两次TIMx_CNT的值之差就是高电平的脉宽。同时根据TIM的计数频率,我们就能知道高电平脉宽的准确时间。写在了自己写的回调里,因为输入捕获有一个自己的回调,它不会进定时器中断回调。
打开定时器:HAL_TIM_Base_Start_IT(&htim2 );
打开输入捕获:HAL_TIM_IC_Start(&htim2 ,TIM_CHANNEL_3);
宏定义:
#define TRIG_ON HAL_GPIO_WritePin (TRIG_GPIO_Port ,TRIG_Pin ,GPIO_PIN_SET )
#define TRIG_OFF HAL_GPIO_WritePin (TRIG_GPIO_Port ,TRIG_Pin ,GPIO_PIN_RESET )
- void TIM2_Callback()
- {
- TRIG_ON;
- delay_us(10);
- TRIG_OFF;
- if(flag ==0)
- {
- __HAL_TIM_SET_CAPTUREPOLARITY(&htim2 ,TIM_CHANNEL_3 ,TIM_INPUTCHANNELPOLARITY_RISING );//检测上升沿
- flag =1;
- }
- else if(flag ==1)
- {
- s1=__HAL_TIM_GET_COMPARE (&htim2 ,TIM_CHANNEL_3);
- __HAL_TIM_SET_CAPTUREPOLARITY(&htim2 ,TIM_CHANNEL_3 ,TIM_INPUTCHANNELPOLARITY_FALLING );//检测下降沿
- flag =2;
- }
- else if(flag ==2)
- {
- s2=__HAL_TIM_GET_COMPARE (&htim2 ,TIM_CHANNEL_3);
- // HAL_TIM_IC_Stop_IT (&htim2 ,TIM_CHANNEL_3);
- __HAL_TIM_SetCounter(&htim2 ,0);
- distance =fabs(s2-s1)*0.017; //计算距离
- }
- osSemaphoreRelease (myBinarySem01Handle);//释放信号量
- }

二 舵机
打开pwm: HAL_TIM_PWM_Start(&htim1,TIM_CHANNEL_1); 用的是定时器1 通道1。
输出pwm: __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,2500); 放到一个函数里就不行。
- void Pwm_Task (void * argument)
- {
- for(;;)
- {
- if (osOK !=xSemaphoreTake(myBinarySem01Handle,10))
- {
- __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,1450);//先归中
- if(distance <=15)//如果距离小于15
- {
- Stop_Task (); //先停下
- __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,500);//右转
- osDelay (800);
- if(distance >15)//右边没有障碍物
- {
- Right_Task ();//右转
- osDelay (800);
- Forward_Task (); //前进
- }
- else if(distance <=15) //还小于15
- {
- __HAL_TIM_SET_COMPARE(&htim1,TIM_CHANNEL_1,2500);//左转
- osDelay (800);
- Left_Task ();//左
- osDelay (800);
- Forward_Task (); //前进
- }
- }
- }
- osDelay (300);
- }
-
- }
三 电机控制
高低电平
- void Forward_Task ()//前
- {
- HAL_GPIO_WritePin (IN1_GPIO_Port ,IN1_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN2_GPIO_Port ,IN2_Pin ,GPIO_PIN_SET );
- HAL_GPIO_WritePin (IN3_GPIO_Port ,IN3_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN4_GPIO_Port ,IN4_Pin ,GPIO_PIN_SET );
- }
-
- void Back_Task ()//后
- {
- HAL_GPIO_WritePin (IN1_GPIO_Port ,IN1_Pin ,GPIO_PIN_SET );
- HAL_GPIO_WritePin (IN2_GPIO_Port ,IN2_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN3_GPIO_Port ,IN3_Pin ,GPIO_PIN_SET );
- HAL_GPIO_WritePin (IN4_GPIO_Port ,IN4_Pin ,GPIO_PIN_RESET );
- }
-
- void Left_Task ()//左
- {
- HAL_GPIO_WritePin (IN1_GPIO_Port ,IN1_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN2_GPIO_Port ,IN2_Pin ,GPIO_PIN_SET );
- HAL_GPIO_WritePin (IN3_GPIO_Port ,IN3_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN4_GPIO_Port ,IN4_Pin ,GPIO_PIN_RESET );
- }
- void Right_Task ()//右
- {
- HAL_GPIO_WritePin (IN1_GPIO_Port ,IN1_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN2_GPIO_Port ,IN2_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN3_GPIO_Port ,IN3_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN4_GPIO_Port ,IN4_Pin ,GPIO_PIN_SET );
- }
- void Stop_Task ()//停
- {
- HAL_GPIO_WritePin (IN1_GPIO_Port ,IN1_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN2_GPIO_Port ,IN2_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN3_GPIO_Port ,IN3_Pin ,GPIO_PIN_RESET );
- HAL_GPIO_WritePin (IN4_GPIO_Port ,IN4_Pin ,GPIO_PIN_RESET );
- }
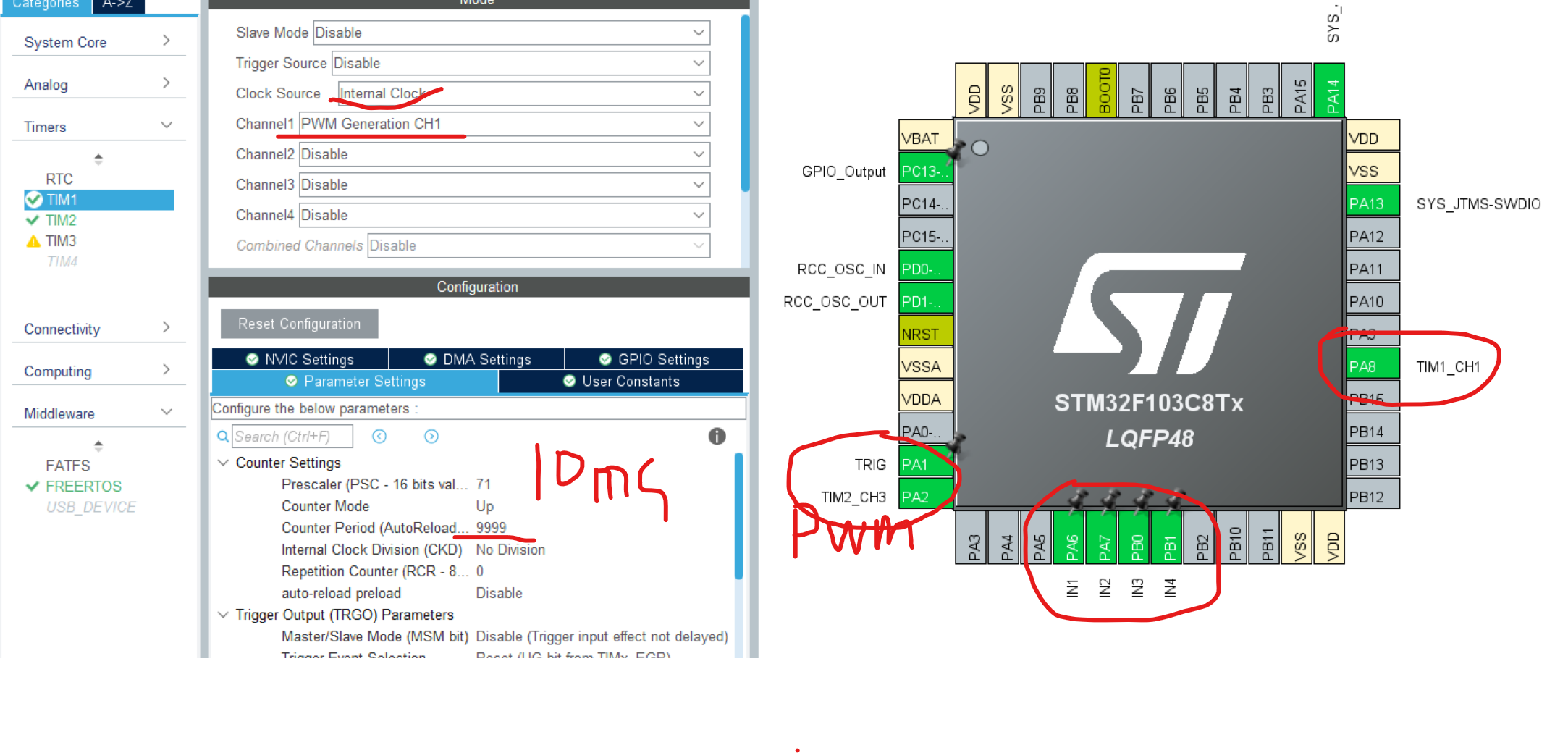
四 cube配置
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46277
推荐阅读
相关标签

