
热门标签
热门文章
- 1springBoot + netty搭建高性能 websocket 服务 & 性能测试(包含python 测试脚本)_netty websocket 和netty-websocket 性能对比
- 2rsync全面讲解
- 3头歌大数据——MapReduce 基础实战 答案 无解析_成绩统计头歌
- 4android的camera_android.hardware.camera
- 5HDFS目录与文件的创建删除与查询操作_hdfs如何删除目录
- 6PMP 2022-10-10 (每日一练)_manfrit和frank是两个项目经理,在他们的职业生涯中一直相互支持。在一次偶然的午
- 7Redis原理
- 8Java IO流--使用FileReader字符输入流读入数据到java程序或者内存的基本操作_filereader 怎么直接传入输入流
- 9scrapy实现分布式爬虫以及布隆过滤器,scrapy-redis所遇到的问题,终端进入虚拟环境_from scrapy_redis.spiders import rediscrawlspider出
- 10ChatGPT 和文心一言哪个更好用?_chatgpt和文心一言哪个更适合seo
当前位置: article > 正文
无人机自主导航 (realsense D430 vins 的安装与调试)_realsense d430的ros2使用
作者:算法研究专家 | 2024-02-04 19:04:48
赞
踩
realsense d430的ros2使用
realsense SDK的安装
参考官方文档,sudo apt-get install librealsense2-dkms 在ARM架构下可以忽略。
sdk安装成功后,运行 realsense-viewer,测试相机。
接下来,安装realsense-ros
sudo apt install ros-melodic-realsense2-camera若出现已下报错:
realsense t265 add-apt-repository 403 Forbidden
1. sudo gedit /etc/apt/sources.list将realsense的关联仓库删掉
- cd /etc/apt/sources.list.d
-
- sudo rm **realsense**
OpenCV 版本问题
某些ARM载板上,预装了opencv4,可以选择性的重新安装opencv3。查看一下版本号:
pkg-config opencv --modversion卸载原有的OpenCV。不要着急执行命令,ros用户注意一下autoremove会将ros删除
- sudo apt-get purge libopencv*
- sudo apt autoremove //选择性执行
- sudo apt-get update
下载opencv源码 官网:Releases - OpenCV
安装依赖
- sudo apt-get install build-essential libgtk2.0-dev libavcodec-dev libavformat-dev libjpeg-dev libswscale-dev libtiff5-dev
- sudo apt-get install libgtk2.0-dev
- sudo apt-get install pkg-config
编译
- cd opencv_x.x.x
- mkdir build
- cd build
- cmake -D CMAKE_BUILD_TYPE=RELEASE -D CMAKE_INSTALL_PREFIX=/usr/local ..
- make -j4
- sudo make install
VINS 安装
Installation — Ceres Solver![]() http://ceres-solver.org/installation.html
http://ceres-solver.org/installation.html
根据HKUST github的要求,需要预先安装ceres。个人测试只要选择 latest stable release
不要选 github的下载链接,在ARM 和 X86的安装都是没问题的。
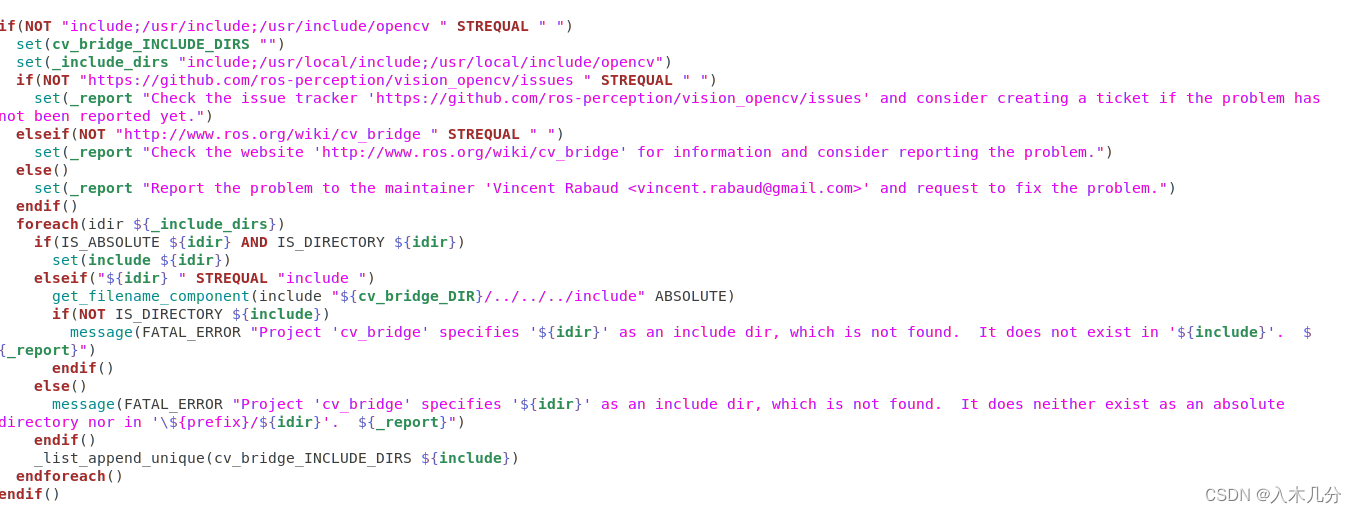
因为vins用到了cv_bridge,若出现以下报错需要修改其配置:
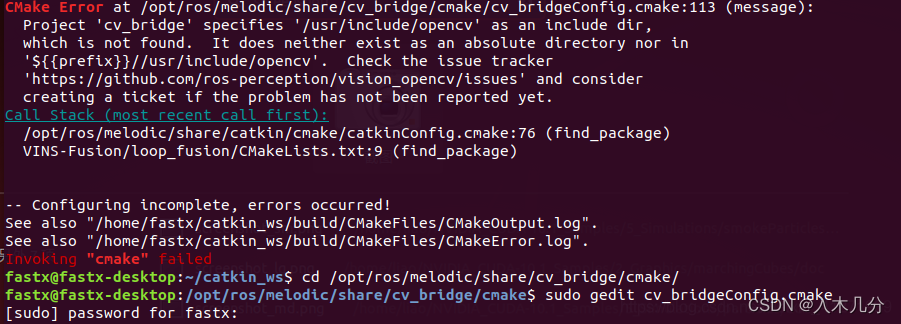
如果是源码安装opencv,需要修改一下/opt/ros/melodic/share/cv_bridge/cv_bridgeConfig.cmake中include的路径。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59660
推荐阅读
相关标签

