
- 1java.lang.IllegalStateException: Fragment not attached to Activity_java.lang.iiegalstateexception:cannot show fragmen
- 2STM32的ADC采集传感器的模拟量数据_adc模拟量
- 3NLP系列之文本分类_线性层文本分类
- 4HCIA-RS知识梳理(下)_vlan tci tpid
- 5109个实用 Shell 脚本实例_shell脚本实例
- 6Windows Store apps开发[7]视图模型与数据绑定_windows 视图模型
- 7vue路由、目录动态生成和分层管理_vue项目目录文件自动生成
- 89大亮点!AI创作助手源码,开启写作新时代_ai助手源码
- 9开发者分享|使用Vitis AI在Zynq MP上实现手势识别_vitis ai 可以用zynq部署嘛
- 10Git 学习笔记 三个区域、文件状态、分支、常用命令
《Deep Residual Learning for Image Recognition》论文研读以及torch代码解读_deep residual learning for image recognition代码复现
赞
踩
Deep Residual Learning for Image Recognition
摘要:
背景:神经网络越深越难训练
解决:提出一个残差学习框架
要点:使得各个层根据输入学习残差函数F(x)而不是原始未参考的函数H(x)
结论:使得网络更容易优化,并且网络加深也不会影响准确率
1. Introduction介绍
0.plain网络
可以看到,网络越深,误差越大。
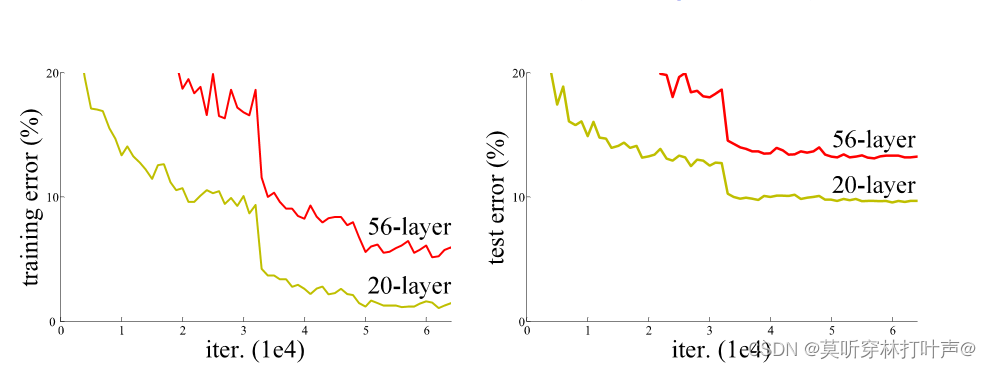
在深度学习的驱使下,一个新的问题产生了:想要训练一个更好的网络,是不是直接堆叠更多的层就行?当然不是。
网络变深了就会有梯度消失/爆炸的问题,阻止了模型的收敛。然而
- 归一初始化normalized initialzation
- 中间归一化intermedizte normalization
很大程度上解决了这一问题。
1.1 退化问题
当更深的网络能够开始收敛时,退化问题就暴露出来了:随着网络深度的增加,准确率会达到饱和(不足为奇),然后准确率迅速退化。但是这种退化不是由过拟合引起的,在一个合适的深度模型中增加更多的层会导致更高的训练误差。
解决方案:改变添加更多层网络的方式
- 增加的层使用恒等映射
得到两个网络,一个是较浅的普通的网络,一个是使用恒等映射的较深网络。
结果:
- 较深的模型误差更小
问题:
- 解算器无法找到与构建的解相当或者更好的解(或无法在可行的时间内找到)
直接学习H(x)比较困难,所以学习F(x)
1.2 梯度消失问题Vanishing Gradient Problem
梯度消失会阻止网络的进一步训练。
eg:sigmoid激活函数的偏导数最大值为0.25。当网络中有很多层时,导致乘积的值会减少,直到某个点损失函数的偏导数接近于0,导致偏导数消失,称之为梯度消失。
两种解决方式:
- 使用其他的激活函数ReLU()
- 构建残差块
1.3 Deep residual learning framework深度残差学习框架
构造深层网络的解决方案:
- 通过恒等映射identity mapping构建增加的层
深层模型不应该产生比浅层模型更高的训练误差。但是SGD找不到这个效果。不能直接学习H(x)。
- 本文中通过引入深度残差学习框架来解决退化问题
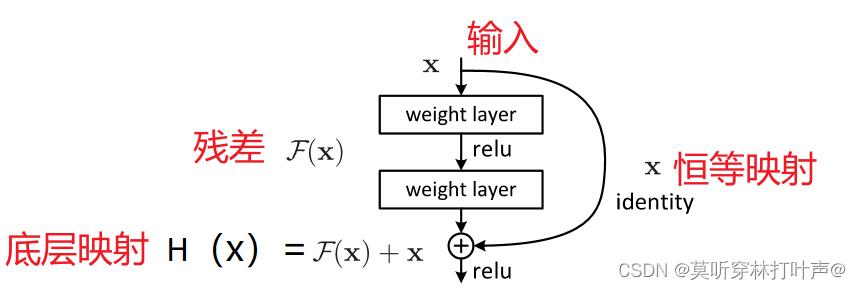
本文让网络层拟合残差映射residual mapping,而不是直接来拟合所需的底层映射desired underlying mapping。拟合F(x),而不是拟合H(x)。
将所需的底层映射表示为H(x),让堆叠的非线性层来拟合另一个映射F(x)=H(x)-x。原始映射被转化成F(x)+x。
我们现在是恒等映射,将x直接恒等映射过来。想要H(x)=x,即要将F(x)推至0。
Residual block把我们需要解决的问题从通过将x映射y(H(x))转变成根据x求x与y(H(x))之间的距离F(x)。所谓反向传播就是网络输出一个值,然后与真实值做比较得到的一个误差损失,同时将这个损失做差改变参数,返回的损失大小取决于原来的损失和梯度,既然目的是改变参数,而问题是改变参数的力度过小,则可以减少参数的值,使损失对参数改变的力度相对增大。
- 残差映射比原始未参考的映射unreferenced mapping更容易优化,我们要将残差推到零
F(x)+x,即为identity mapping,通过前馈神经网络的shortcut connection来实现。shortcut只执行恒等映射,不添加额外的参数和计算复杂度,整个网络仍然可以使用SGD进行计算,无需修改解算器。
152层的残差网络复杂性仍低于VGG网络。
结果:
- 残差网络更易于优化
- 相同深度的plain网络和残差网络相比,残差网络的训练误差更小
- 泛化能力更好
2.Related Work 相关工作
2.1 Residual Representations
残差向量编码比原始向量编码更加有效;
一些方法表明:良好的重构或预处理可以简化优化问题。
2.2 shortcut Connections
多层感知机、Goging、deeply都采用了shortcut Connections,解决了梯度消失/爆炸问题。
我们的公式总是学习残差函数,我们的shortcut Connections从来不关闭,所有的信息总是要通过的。
3.Deep Residual Learning 深度残差学习
3.1 Residual Learning 残差学习
假设输入维度和输出维度相同时,我们学习残差函数F(x)=H(x)-x,而不是学习H(x),因此原始函数变成F(x)+x,但是学习的难易程度不同。
- 学习F(x)=H(x)-x=0更加容易。并且模型不会变差,因为F(x)=0时,输入输出是相等的
- 如果添加的层可以被构造为恒等映射,那么更深的模型的训练误差应该不大于与其对应的浅层网络
3.2 通过shortcuts进行恒等映射

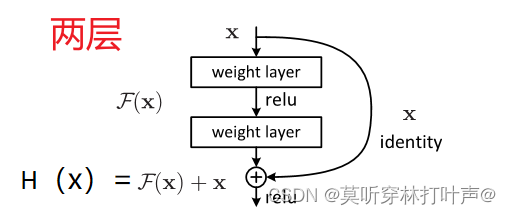
对于上面具有两层的残差块:
对于维度相同的映射:实线跳跃连接
残差F(x):输入x乘第一层的权重,经过一次非线性激活,再乘第二层的权重。
再将得到的F(x)加恒等映射x后得y,再执行一次非线性激活。
对于维度不同的映射:虚线跳跃连接
这个Ws是用来匹配维度的,并且仅用来匹配维度。通过快捷连结来执行线性投影Ws来匹配维度。

一般残差块是两层或者三层的效果比较好,一层的效果没有优势。
3.3 Network Architectures网络架构
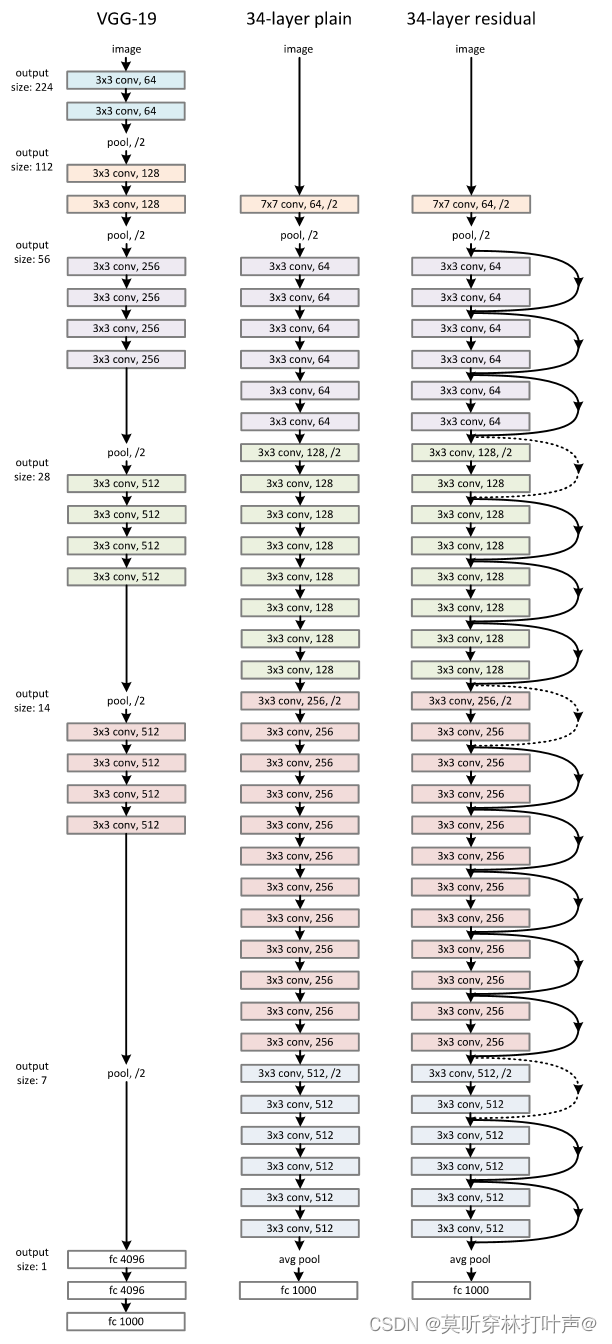
受到VGG网络的启发,采用以下原则:比VGG网有更少的卷积核和更低的复杂性
这里的验证看后续的代码
- 对于相同的特征图大小,各层具有相同数量的l滤波器
- 特征图数量减半,则滤波器数量加一倍(如果通道数/卷积核的数量翻了两倍,输入的高和宽通常都会减半)
- 步长为2的卷积层直接执行下采样(每个残差块的第一个卷积层)
- 网络以一个全局平均池化层和具有1000路全连接层的softmax结束。加权层的总数是34
当输入和输出具有相同的维度的时候:
采用shortcut实现连接方式
当输入和输出具有不同维度的时候:
一般都采用后者。
- 在增加的维度上用0来填充,不会增加额外的参数
- Ws的方式,通过1×1的卷积做映射,stride=2,在空间无作用,主要为了改变通道的维度
具体做法:
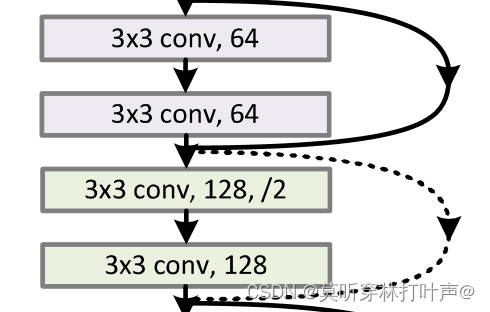
上图中的通道数从64变为128,采用的是步长为2,输出通道为128的1×1卷积来实现。
3.4 Implementation
224×224的图像,使用图像增强;
在卷积之后和激活之前都采用批量归一化(BN);
学习率从0.1开始,误差达到稳定水平的时候/10;
4.Experiments 实验
4.1图像分类
Plain Networks: 34层比18层的误差高。但是不是由于梯度消失引起的,因为采用的BN层(BN层保证了梯度),可能是因为收敛速度太慢,影响了训练误差。
ResNet: 只是增加了恒等映射,使用0填充(无参数),34就比18好。
证明了0填充(无参数)易于训练。再证明1×1卷积的方法比0填充更好,代码几乎使用这一种方法(增加维度的使用1×1的卷积,其余为恒等映射),代码验证在后面。
18,34采用两层的残差块,50,101,152采用三层的残差块,称为瓶颈设计bottenech design:
- 1×1 负责减少然后恢复维度
- 3×3具有较小输入/输出维度的瓶颈
4.2 在CIFAR10上的分类
不使用maxout/dropout,采用正则化来防止过拟合。残差网络只是简单的实施了正则化
展望: 结合更强的正则化来防止过拟合。
4.3 目标检测
检测方法使用区域卷积神经网络R-CNN,用残差网络代替主干网络。有提升。
5.代码
5.1 先分析pytorch提供的残差网络的源代码
参考https://blog.csdn.net/u014453898/article/details/97115891
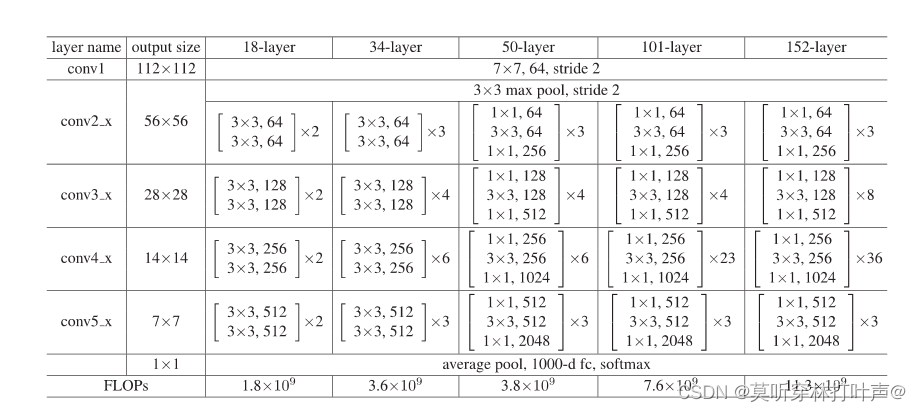
- 观察下图,每个不同的残差网络中四个残差块的输入通道数均为:64,128,256,512,称为“基准通道数”,并且所有的输入输出通道数都是64的倍数。
- 18-layer和34-layer使用的是基础残差块(两层残差块:两个3×3的卷积层),50-layer、101-layer、152-layer使用的瓶颈残差块(三层残差块:一层1×1的卷积层,一层3×3的卷积层,一层1×1的卷积层)。

官网:

仔细阅读源代码,找出调用顺序:
以resnet.18为例
resnet18----->_resnet---->ResNet
resnet18方法:
在自己的代码里调用时:torchvision.models.resnet18,输入相应的参数,返回_resnet

_resnet方法:

_resnet方法里的是否采用预训练:

那这些url从哪里来的?将源代码往上翻:

ResNet方法
准备工作
上文说到18-layer和34-layer使用的是基础残差块(两层残差块:两个3×3的卷积层),50-layer、101-layer、152-layer使用的瓶颈残差块(三层残差块:一层1×1的卷积层,一层3×3的卷积层,一层1×1的卷积层)。
所以先将这两个卷积层准备好。
(1)两个卷积层

padding=1:前后左右往外扩充一格,默认填充0。
groups=1:假如输入通道数是64,输出通道数128。
stride=1:这两个卷积层的默认stride都是1。
- groups=1,输入通道数64和输出通道数128进行全卷积,即为全连接的卷积层。
- groups=2,输入通道数被分为两个32,输出通道数被分为两个64,第一个通道32和第一个通道64进行全卷积,第二个通道32和第二个通道64进行全卷积。
(2)基础残差块(两个3×3的卷积层进行堆叠)



- 第一个卷积层conv1()指定了步长为2,后面解释这里的步长为什么是2
- 第二个卷积层conv2()使用默认步长为1
由公式:得到
- 当S=2时,W会减少两倍
- 当S=1时,W是不会变的

这个原理主要用在虚线连接的地方:
①:实线连接的跳跃连接,输入通道数和输出通道数相同的情况。即上面代码downsample=none的情况。
②:conv2_x到conv3_x:虚线连接的跳跃连接(从上一个残差块到下一个残差块的跳跃连接),输入通道数和输出通道数不相同的情况,即上面代码要使用downsample进行1×1卷积转化的情况。
残差块第一层卷积层的步长为2,为了实现通道64到128的转变。
③:经过一次layer,特征图的大小减少两倍。

(3)瓶颈结构残差块(1×1、3×3、1×1)

ResNet方法
先看前向传播函数,动态是所有类型的残差函数均有4层,均调用这4层来实现。

以resnet50为例,
到ResNet里,[3,4,6,3]即为layers[0]为3,layers[1]为4,layers[2]为6,layers[3]为3。转到_make_layer函数。

_make_layer函数:

expansion就决定了选择基础残差块结构或者瓶颈结构。

使用pytorch导入神经网络
复习一下,调用函数后返回下载连接,残差块结构,残差块结构数量数的序列,是否采用预训练的模型,是否显示进度条。

import torchvision.models.resnet
resnet34=torchvision.models.resnet34(pretrained=True,progress=True)
print(resnet34)
- 1
- 2
- 3
结果:
可以看到,在输入四层layer之前,经历了一次步长2×2的卷积和步长2×2的最大池化层,图像已经缩小了四倍。
ResNet(
(conv1): Conv2d(3, 64, kernel_size=(7, 7), stride=(2, 2), padding=(3, 3), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(maxpool): MaxPool2d(kernel_size=3, stride=2, padding=1, dilation=1, ceil_mode=False)
(layer1): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(1): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(64, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer2): Sequential(
(0): BasicBlock(
(conv1): Conv2d(64, 128, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(64, 128, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(128, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer3): Sequential(
(0): BasicBlock(
(conv1): Conv2d(128, 256, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(128, 256, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(3): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(4): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(5): BasicBlock(
(conv1): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(256, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(layer4): Sequential(
(0): BasicBlock(
(conv1): Conv2d(256, 512, kernel_size=(3, 3), stride=(2, 2), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(downsample): Sequential(
(0): Conv2d(256, 512, kernel_size=(1, 1), stride=(2, 2), bias=False)
(1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(1): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
(2): BasicBlock(
(conv1): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn1): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
(relu): ReLU(inplace=True)
(conv2): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1), bias=False)
(bn2): BatchNorm2d(512, eps=1e-05, momentum=0.1, affine=True, track_running_stats=True)
)
)
(avgpool): AdaptiveAvgPool2d(output_size=(1, 1))
(fc): Linear(in_features=512, out_features=1000, bias=True)
)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141

