
- 1DockerUI如何部署结合内网穿透实现公网环境管理本地docker容器_docker ui
- 2Machine Learning Engineering Case Studies with Python notebook
- 3无监督学习的主流算法及其优缺点
- 42024年鸿蒙最全鸿蒙HarmonyOS应用开发-自定义实现验证码框_鸿蒙开发字母验证码,2024年最新到了三面试成功率高吗_鸿蒙textinput隐藏光标
- 5数据结构——树(二叉树)的基础知识 & 堆 & 堆排序 & 时间复杂度讲解 & topk问题(详解)_二叉堆新增节点的时间复杂度
- 6国内大语言模型的相对比较:ChatGLM2-6B、BAICHUAN2-7B、通义千问-6B、ChatGPT3.5_atom-7b-chat和chatglm哪个性能好一点
- 7聆思CSK6大模型开发板视觉识别类开源SDK介绍_csk6 目标检测
- 8android自定义view_android 自定义view
- 9ad电阻原理图_105篇DIY开源资料汇总分享:原理图/PCB图/源码/BOM表/相关资料文档等...
- 10粒子群算法(Python代码实例)_假设有一个粒子群算法应用于解决优化问题,初始时有20个粒子,搜索空间是二维平面。
动态、静态障碍物局部路径规划(matlab)自动驾驶 阿克曼转向系统_障碍物大小不一的路径规划
赞
踩
动态、静态障碍物局部路径规划(matlab)
自动驾驶 阿克曼转向系统
考虑车辆的运动学、几何学约束
DWA算法一般用于局部路径规划,该算法在速度空间内采样线速度和角速度,并根据车辆的运动学模型预测其下一时间间隔的轨迹。
对待评价轨迹进行评分,从而获得更加安全、平滑的最优局部路径。
本代码可实时展示DWA算法规划过程中车辆备选轨迹的曲线、运动轨迹等,具有较好的可学性,移植性。
代码清楚简洁,方便更改使用 可在此基础上进行算法的优化。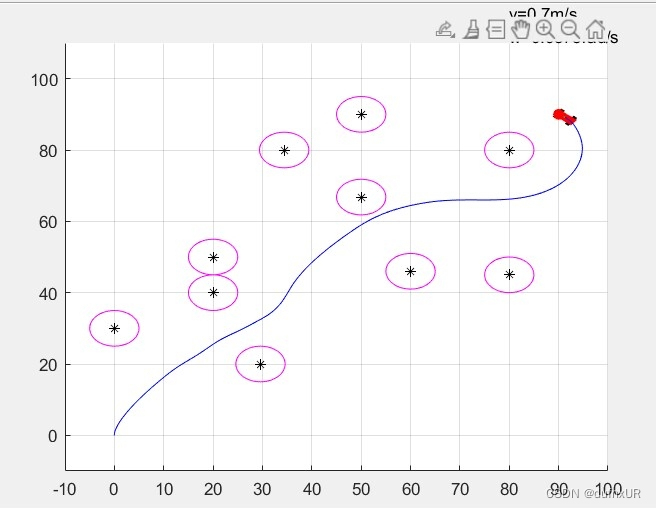
动态、静态障碍物局部路径规划(MATLAB)与自动驾驶技术紧密相连。而阿克曼转向系统是一种广泛应用于自动驾驶的转向方式。因此,本文将探讨如何利用DWA算法进行车辆局部路径规划,并考虑车辆的运动学、几何学约束,以实现更加安全、平滑的最优局部路径。
在自动驾驶过程中,局部路径规划是一个至关重要的环节。DWA算法是一种常见的局部路径规划算法,它采用速度空间内的线速度和角速度对车辆下一时间间隔的轨迹进行预测。同时,DWA算法考虑车辆的运动学模型和几何学约束,以确保生成的路径安全平滑。
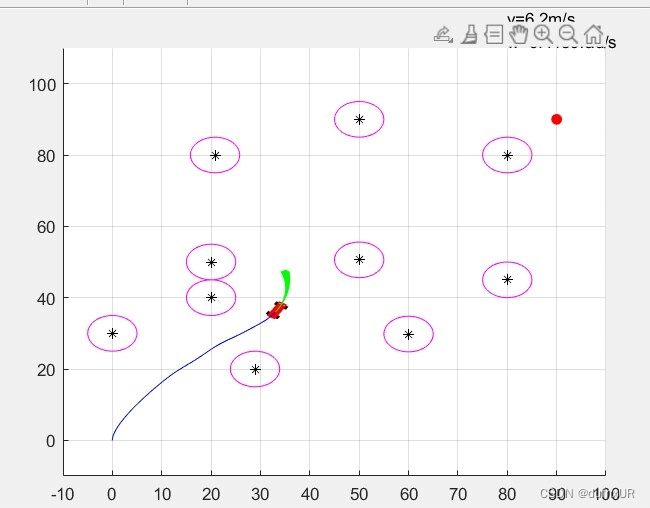
在DWA算法中,对备选轨迹进行评分是一个至关重要的环节。通过对备选轨迹进行评分,从而选择最佳的路径,以确保车辆行驶的安全性和平滑性。在本文的代码实现中,我们可以看到DWA算法规划过程中车辆备选轨迹的曲线、运动轨迹等,这些信息对于车辆的路径规划和行驶控制非常关键。
除了考虑车辆的运动学和几何学约束外,在车辆的自动驾驶中,考虑障碍物是不可或缺的。在DWA算法中,我们可以通过引入动态、静态障碍物来实现更加准确的路径规划。通过对障碍物进行建模和检测,可以更好地避免车辆与障碍物之间的碰撞,从而保证车辆行驶的安全性。
结合MATLAB编程语言的可视化和算法优化特性,我们可以简洁明了地实现DWA算法的车辆局部路径规划,并进行相应的算法优化。同时,本文的代码具有较好的可学性和移植性,可以基于此代码进行定制和扩展,以适用于更广泛的自动驾驶场景。
综上,本文通过对DWA算法的介绍和MATLAB代码实现,展示了如何利用局部路径规划技术实现自动驾驶,以及考虑障碍物、运动学和几何学约束等因素,实现车辆最优、平滑、安全的局部路径规划,这对于未来智能交通的发展具有重要意义。
相关代码,程序地址:http://lanzouw.top/683402310051.html


