
热门标签
热门文章
- 1学习Java, 发现switch竟有三种用法方式! 速学!_java switch 直通式
- 2python如何做到只在服务启动时执行_在后台启动时执行python脚本
- 3职级P1到P12等级体系详解_吉利p1到p12的岗位级别
- 4ESP8266驱动五线四相步进电机_esp8266控制步进电机
- 5备战蓝桥杯---搜索(剪枝)
- 6叮咚~请查收你的2023年度AI项目实战报告
- 7windows搜索根据关键字查找不到文件-通配符使用_windows根据关键字复制文件
- 8kafka单节点部署,亲测可行!_kafka一个节点可以吗
- 9MVC模式和MVP模式的区别_mvc mvp 区别
- 10基于视频的移动目标检测 Moving Object Detection_moving object detection and tracking from video ca
当前位置: article > 正文
ROS2——realsense话题订阅_ros2 realsense
作者:IT思考机器 | 2024-02-04 19:40:24
赞
踩
ros2 realsense
realsense-ros安装
https://github.com/IntelRealSense/realsense-ros
安装完成后,进行检查
ros2 launch realsense2_camera rs_launch.py
- 1
在新的terminal中输入
ros2 topic list
- 1
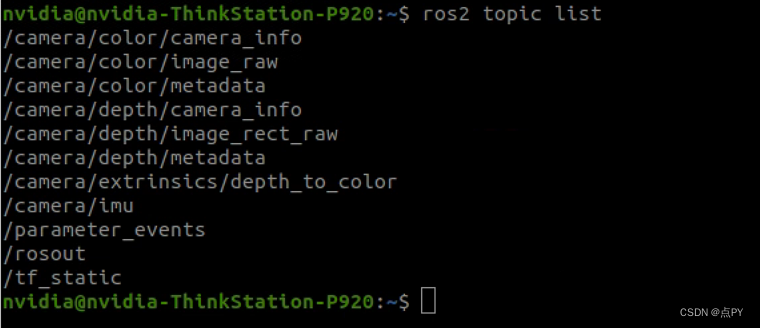
出现上面的结果,表示安装成功
C++
创建功能包
ros2 pkg create --build-type ament_cmake --dependencies rclcpp std_msgs cv_bridge
- 1
rclcpp订阅
#include <iostream> #include <rclcpp/rclcpp.hpp> #include <opencv2/highgui/highgui.hpp> #include <cv_bridge/cv_bridge.h> #include <sensor_msgs/msg/image.hpp> #include <std_msgs/msg/string.hpp> using std::placeholders::_1; cv::Mat color_mat, res_mat; class RealsenseSubscriber: public rclcpp::Node { public: RealsenseSubscriber() : Node("realsense_subscriber") { auto default_qos = rclcpp::QoS(rclcpp::SystemDefaultsQoS()); subImg = this->create_subscription<sensor_msgs::msg::Image>( "/camera/color/image_raw", default_qos, std::bind(&RealsenseSubscriber::imgCallBack, this, _1)); } private: void imgCallBack(sensor_msgs::msg::Image::SharedPtr msg) { if(!rclcpp::ok()) return; cv_bridge::CvImagePtr cv_ptr; cv_ptr = cv_bridge::toCvCopy(msg, msg->encoding); color_mat = cv_ptr->image; printf("subscribe image sucessfully!!!"); } rclcpp::Subscription<sensor_msgs::msg::Image>::SharedPtr subImg; }; int main(int argc, char * argv[]) { rclcpp::init(argc, argv); rclcpp::spin(std::make_shared<RealsenseSubscriber>()); rclcpp::shutdown(); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
CMakeLists.txt
cmake_minimum_required(VERSION 3.5) project(orchard_object_detection) # Default to C99 if(NOT CMAKE_C_STANDARD) set(CMAKE_C_STANDARD 99) endif() # Default to C++14 if(NOT CMAKE_CXX_STANDARD) set(CMAKE_CXX_STANDARD 14) endif() if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang") add_compile_options(-Wall -Wextra -Wpedantic) endif() # find dependencies find_package(ament_cmake REQUIRED) find_package(rclcpp REQUIRED) find_package(std_msgs REQUIRED) find_package(sensor_msgs REQUIRED) find_package(OpenCV REQUIRED) find_package(cv_bridge REQUIRED) # if(BUILD_TESTING) # find_package(ament_lint_auto REQUIRED) # # the following line skips the linter which checks for copyrights # # uncomment the line when a copyright and license is not present in all source files # #set(ament_cmake_copyright_FOUND TRUE) # # the following line skips cpplint (only works in a git repo) # # uncomment the line when this package is not in a git repo # #set(ament_cmake_cpplint_FOUND TRUE) # ament_lint_auto_find_test_dependencies() # endif() add_executable(object_detection ./src/main.cpp) target_link_libraries(object_detection ${opencv_libraries} ) ament_target_dependencies(object_detection rclcpp std_msgs cv_bridge) install(TARGETS object_detection DESTINATION lib/${PROJECT_NAME} ) ament_package()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
Python
创建工作空间
mkdir -p ros2_ws/src
cd ros2_ws/src
- 1
- 2
创建功能包
在src文件夹内进行
ros2 pkg create yolo_python --build-type ament_python --dependencies rclpy cv_bridge
- 1
编写订阅逻辑代码
import rclpyfrom rclpy.node import Nodefrom cv_bridge import CvBridge from sensor_msgs.msg import Imageimport cv2 class ImageSubscriber(Node): def __init__(self): # initiate the Node class's constructor and give it a name super().__init__("image_subsriber") # Create the subscriber. This subsciber will receive an image self.subscription = self.create_subscription(Image, "/camera/color/image_raw", self.image_callback, 10) self.subscription # prevent unused variable warning self.br = CvBridge() def image_callback(self, data): self.get_logger().info("Receiving realsense frame") current_img = self.br.imgmsg_to_cv2(data) cv2.imshow("camera", current_img) cv2.waitKey(1) def main(args=None): rclpy.init(args=args) yolo_node = ImageSubscriber() # yolo_node.get_logger().info("print inof") rclpy.spin(yolo_node) rclpy.shutdown() if __name__ == "__main__": main()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
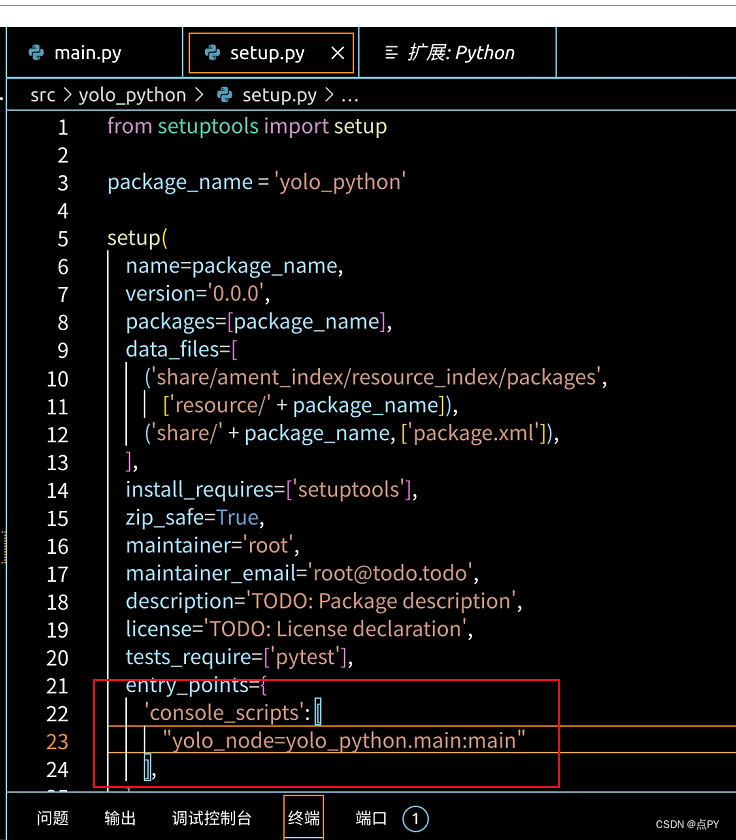
配置
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59726
推荐阅读
相关标签

