
热门标签
热门文章
- 1每天五分钟机器学习:基于梯度检验判断神经网络梯度计算的准确性_如何判定神经网络梯度可导
- 2图论之各种找环
- 3系列文章:如何利用PaddleDetection做一个完整的项目_paddledetection实战项目
- 4AES C语言实现
- 5Android基础-SharedPreferences详解_android sharedpreferences
- 6STM32内存分配解析及变量的存储位置_stm32 mmu
- 7spring-mvc底层实现-1_spring mvc基于servlet接口实现
- 8python安装tensorflow_python安装tensorflow教程
- 9Java语法学习集合
- 10Python 形参和实参,局部变量和全局变量的含义理解及使用_形参、实参、变量
当前位置: article > 正文
蓝桥杯嵌入式第六届真题(完成)STM32G431
作者:思考机器2 | 2024-02-03 14:46:19
赞
踩
蓝桥杯嵌入式第六届真题(完成)STM32G431
蓝桥杯嵌入式第六届真题(完成)STM32G431
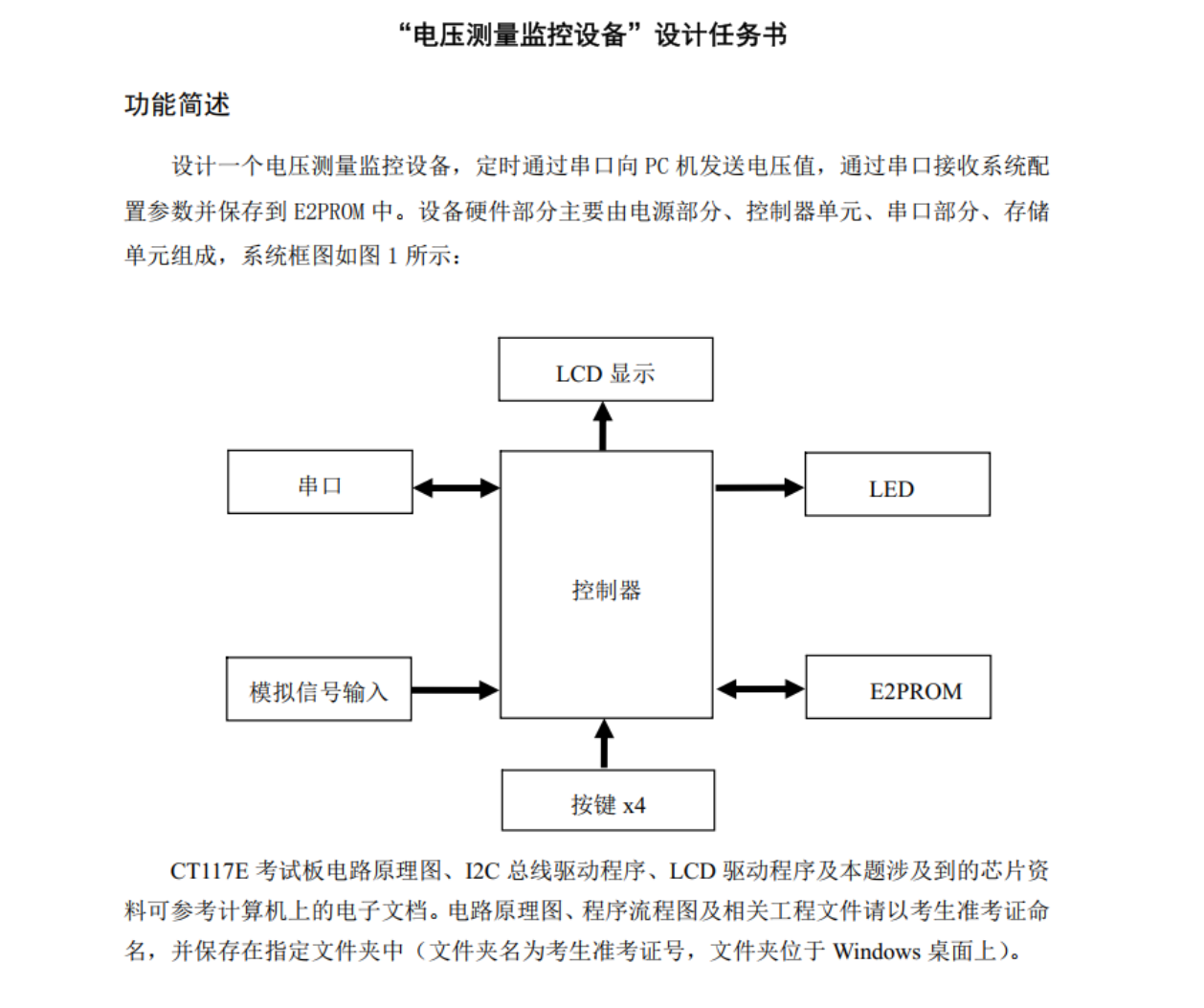
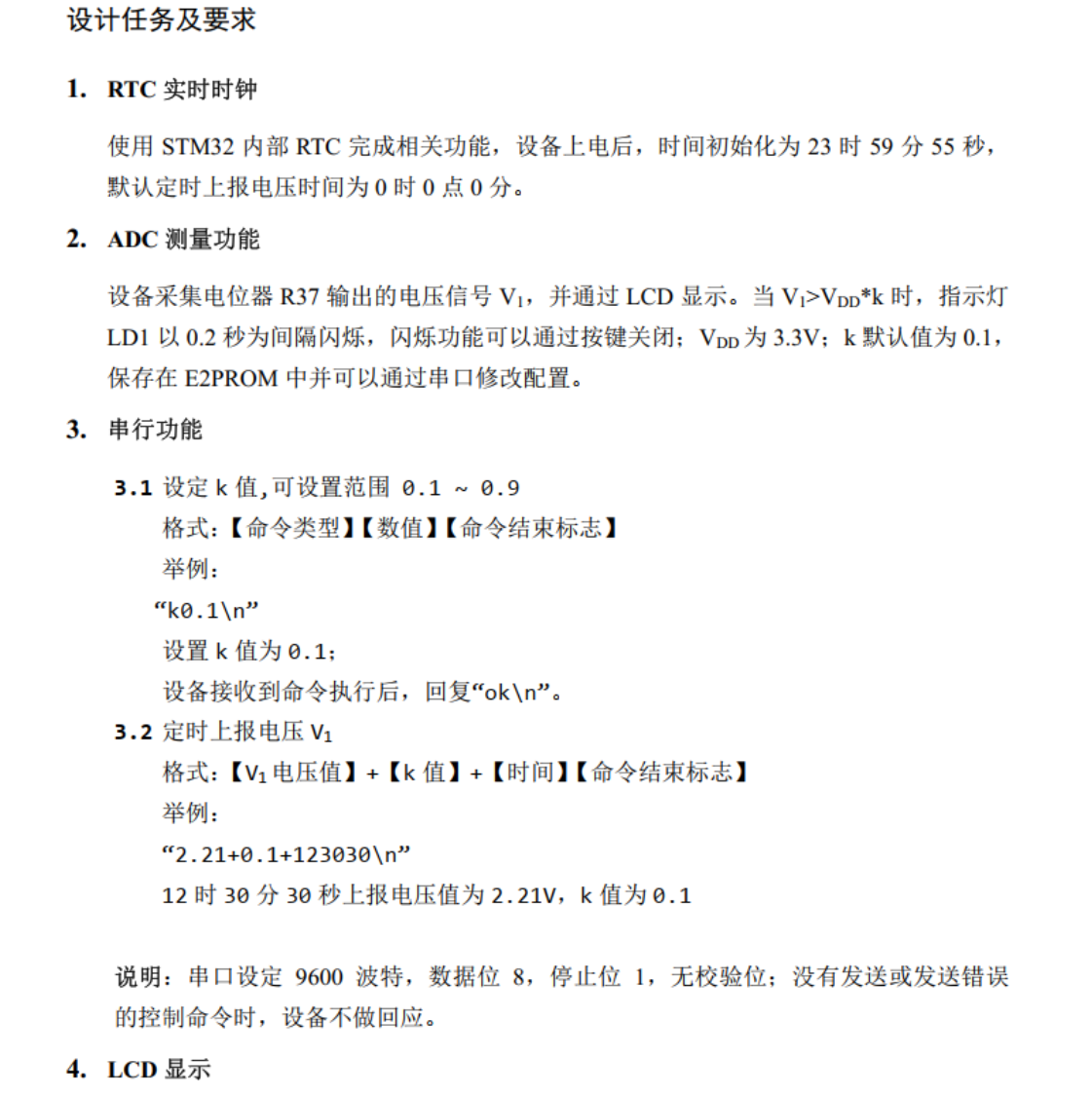
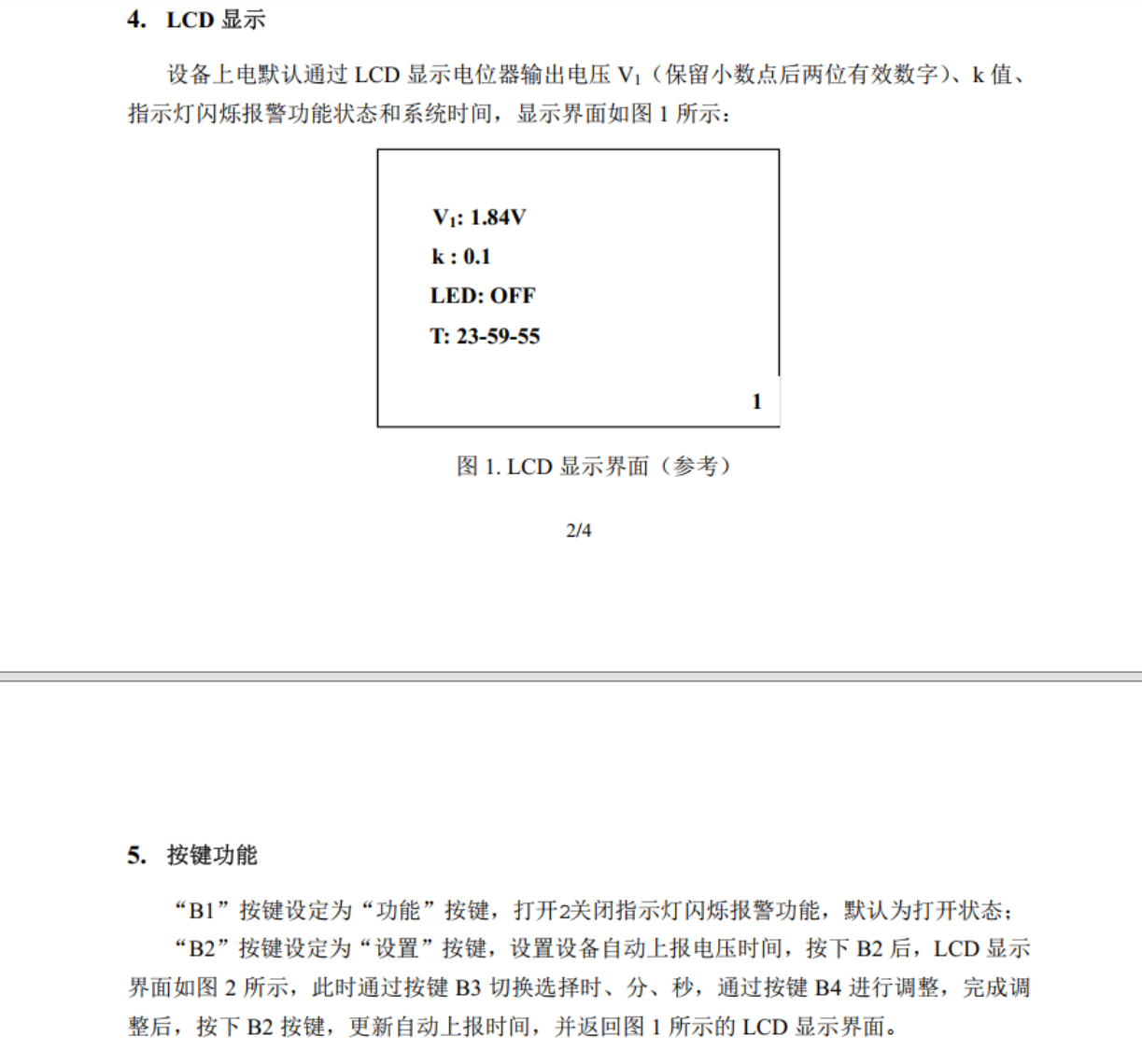
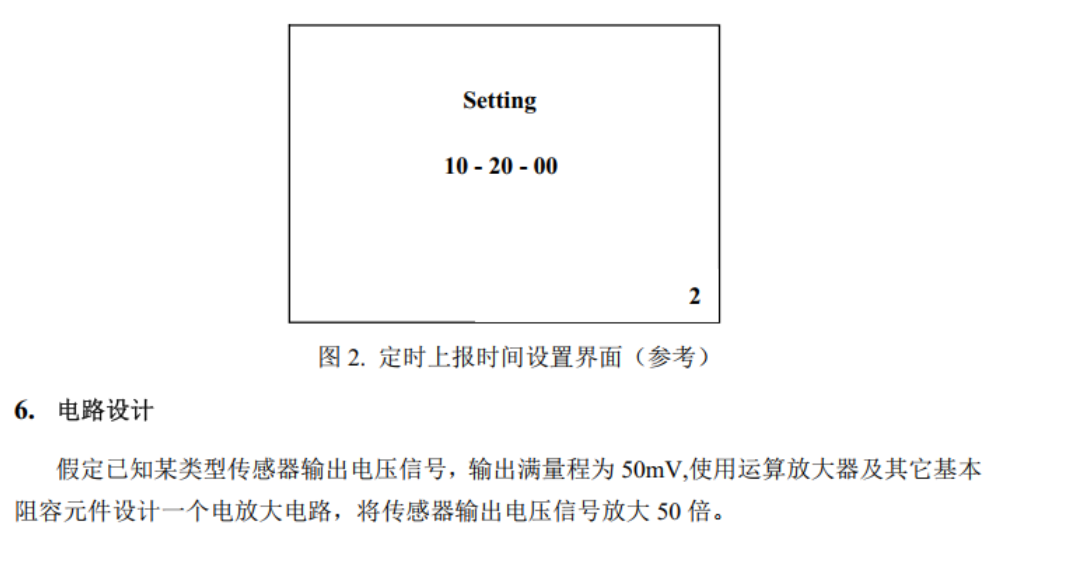
题目部分
相关文件
main.c
/* USER CODE BEGIN Header */ /** ****************************************************************************** * @file : main.c * @brief : Main program body ****************************************************************************** * @attention * * <h2><center>© Copyright (c) 2021 STMicroelectronics. * All rights reserved.</center></h2> * * This software component is licensed by ST under BSD 3-Clause license, * the "License"; You may not use this file except in compliance with the * License. You may obtain a copy of the License at: * opensource.org/licenses/BSD-3-Clause * ****************************************************************************** */ /* USER CODE END Header */ /* Includes ------------------------------------------------------------------*/ #include "main.h" #include "adc.h" #include "rtc.h" #include "tim.h" #include "usart.h" #include "gpio.h" /* Private includes ----------------------------------------------------------*/ /* USER CODE BEGIN Includes */ #include "i2c_hal.h" #include "key.h" #include "myadc.h" #include "led.h" #include "string.h" /* USER CODE END Includes */ /* Private typedef -----------------------------------------------------------*/ /* USER CODE BEGIN PTD */ uint8_t lcdtext[30]; extern struct Key key[4]; uint8_t view = 0;//鍒濆lcd鏄剧ず RTC_TimeTypeDef Time; RTC_DateTypeDef Date; uint8_t h=0,m=0,s=0; float val; float k = 0.1; uint8_t ledflag = 1; uint8_t ledtimes; extern unsigned char Recive_Data[5]; extern unsigned char Temp_Data[1]; extern bool rxflag; extern unsigned char rx_pointer; uint32_t counter = 0; bool ledState = false; /* USER CODE END PTD */ /* Private define ------------------------------------------------------------*/ /* USER CODE BEGIN PD */ /* USER CODE END PD */ /* Private macro -------------------------------------------------------------*/ /* USER CODE BEGIN PM */ /* USER CODE END PM */ /* Private variables ---------------------------------------------------------*/ /* USER CODE BEGIN PV */ /* USER CODE END PV */ /* Private function prototypes -----------------------------------------------*/ void SystemClock_Config(void); /* USER CODE BEGIN PFP */ void key_process(void); void lcd_process(void); void led_process(void); void rx_process(void); void tx_process(void); /* USER CODE END PFP */ /* Private user code ---------------------------------------------------------*/ /* USER CODE BEGIN 0 */ /* USER CODE END 0 */ /** * @brief The application entry point. * @retval int */ int main(void) { /* USER CODE BEGIN 1 */ /* USER CODE END 1 */ /* MCU Configuration--------------------------------------------------------*/ /* Reset of all peripherals, Initializes the Flash interface and the Systick. */ HAL_Init(); /* USER CODE BEGIN Init */ /* USER CODE END Init */ /* Configure the system clock */ SystemClock_Config(); /* USER CODE BEGIN SysInit */ /* USER CODE END SysInit */ /* Initialize all configured peripherals */ MX_GPIO_Init(); MX_TIM2_Init(); MX_ADC2_Init(); MX_RTC_Init(); MX_USART1_UART_Init(); /* USER CODE BEGIN 2 */ HAL_TIM_Base_Start_IT(&htim2); HAL_UART_Receive_IT(&huart1, Temp_Data, 1); LCD_Init(); /* USER CODE END 2 */ /* Infinite loop */ /* USER CODE BEGIN WHILE */ LCD_Clear(Black); LCD_SetBackColor(Black); LCD_SetTextColor(White); //EEPROM_Write_Float(0,0.9); //HAL_Delay(5); while (1) { lcd_process(); //EEPROM_Write(0,20); // HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN); // HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN); // sprintf((char *)lcdtext,"%.2f",get_adc(&hadc2)); // LCD_DisplayStringLine(Line2,lcdtext); // sprintf((char *)lcdtext,"%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds); // LCD_DisplayStringLine(Line4,lcdtext); key_process(); led_process(); rx_process(); tx_process(); /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ } /* USER CODE END 3 */ } /** * @brief System Clock Configuration * @retval None */ void SystemClock_Config(void) { RCC_OscInitTypeDef RCC_OscInitStruct = {0}; RCC_ClkInitTypeDef RCC_ClkInitStruct = {0}; RCC_PeriphCLKInitTypeDef PeriphClkInit = {0}; /** Configure the main internal regulator output voltage */ HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1); /** Initializes the RCC Oscillators according to the specified parameters * in the RCC_OscInitTypeDef structure. */ RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI|RCC_OSCILLATORTYPE_LSI; RCC_OscInitStruct.HSIState = RCC_HSI_ON; RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT; RCC_OscInitStruct.LSIState = RCC_LSI_ON; RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON; RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI; RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV2; RCC_OscInitStruct.PLL.PLLN = 20; RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2; RCC_OscInitStruct.PLL.PLLQ = RCC_PLLQ_DIV2; RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2; if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK) { Error_Handler(); } /** Initializes the CPU, AHB and APB buses clocks */ RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2; RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK; RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1; RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1; RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV1; if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK) { Error_Handler(); } /** Initializes the peripherals clocks */ PeriphClkInit.PeriphClockSelection = RCC_PERIPHCLK_RTC|RCC_PERIPHCLK_USART1 |RCC_PERIPHCLK_ADC12; PeriphClkInit.Usart1ClockSelection = RCC_USART1CLKSOURCE_PCLK2; PeriphClkInit.Adc12ClockSelection = RCC_ADC12CLKSOURCE_SYSCLK; PeriphClkInit.RTCClockSelection = RCC_RTCCLKSOURCE_LSI; if (HAL_RCCEx_PeriphCLKConfig(&PeriphClkInit) != HAL_OK) { Error_Handler(); } } /* USER CODE BEGIN 4 */ void key_process(void) { if(key[0].key_flag==1&&view==0) { LCD_Clear(Black); key[0].key_flag=0; view = 1; ledflag = 0; } else if(key[0].key_flag==1&&view==1) { LCD_Clear(Black); key[0].key_flag=0; view = 0; ledflag = 1; } if(key[1].key_flag==1&&(view==0||view==1)) { LCD_Clear(Black); key[1].key_flag=0; view = 2; } if(key[1].key_flag==1&&(view==3||view==4||view==5)) { LCD_Clear(Black); key[1].key_flag=0; view = 0; } if(key[2].key_flag==1&&(view==2||view==3||view==4||view==5)) { LCD_Clear(Black); key[2].key_flag=0; view++; if(view>5) { view = 3; } } if(key[3].key_flag==1&&view==3) { LCD_Clear(Black); key[3].key_flag=0; h++; if(h>24) { h=0; } } else if (key[3].key_flag==1&&view==4) { LCD_Clear(Black); key[3].key_flag=0; m++; if(m>60) { m=0; } } else if (key[3].key_flag==1&&view==5) { LCD_Clear(Black); key[3].key_flag=0; s++; if(s>60) { s=0; } } } void lcd_process(void) { switch (view) { case 0: //LED鎵撳紑鐣岄潰 { val = get_adc(&hadc2); sprintf((char *)lcdtext," V1:%.2f ",val); LCD_DisplayStringLine(Line1,lcdtext); sprintf((char *)lcdtext," K:%.1f ",EEPROM_Read_Float(0)); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," LED:ON "); LCD_DisplayStringLine(Line5,lcdtext); HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN); HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN); sprintf((char *)lcdtext," T:%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds); LCD_DisplayStringLine(Line7,lcdtext); } break; case 1://LED鍏抽棴鐣岄潰 { val = get_adc(&hadc2); sprintf((char *)lcdtext," V1:%.2f ",val); LCD_DisplayStringLine(Line1,lcdtext); sprintf((char *)lcdtext," K:%.1f ",EEPROM_Read_Float(0)); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," LED:OFF "); LCD_DisplayStringLine(Line5,lcdtext); HAL_RTC_GetDate(&hrtc,&Date,RTC_FORMAT_BIN); HAL_RTC_GetTime(&hrtc,&Time,RTC_FORMAT_BIN); sprintf((char *)lcdtext," T:%02d-%02d-%02d",Time.Hours,Time.Minutes,Time.Seconds); LCD_DisplayStringLine(Line7,lcdtext); } break; case 2://璁剧疆鐣岄潰 { sprintf((char *)lcdtext," Setting "); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s); LCD_DisplayStringLine(Line5,lcdtext); } break; case 3://璁剧疆灏忔椂鐣岄潰 { sprintf((char *)lcdtext," Setting "); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s); LCD_DisplayStringLine(Line5,lcdtext); sprintf((char *)lcdtext," --"); LCD_DisplayStringLine(Line6,lcdtext); } break; case 4://璁剧疆鍒嗛挓鐣岄潰 { sprintf((char *)lcdtext," Setting "); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s); LCD_DisplayStringLine(Line5,lcdtext); sprintf((char *)lcdtext," --"); LCD_DisplayStringLine(Line6,lcdtext); } break; case 5://璁剧疆绉掔晫闈? { sprintf((char *)lcdtext," Setting "); LCD_DisplayStringLine(Line3,lcdtext); sprintf((char *)lcdtext," %02d - %02d - %02d",h,m,s); LCD_DisplayStringLine(Line5,lcdtext); sprintf((char *)lcdtext," --"); LCD_DisplayStringLine(Line6,lcdtext); } break; default: break; } } void led_process(void) { if (ledflag && val > 3.3f * k) { if (ledState) { leddisplay(0x02); }else{ leddisplay(0x00); } } } void rx_process(void) { if(rxflag) { if(Recive_Data[3] == '1') { k = 0.1; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '2') { k = 0.2; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '3') { k = 0.3; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '4') { k = 0.4; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '5') { k = 0.5; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '6') { k = 0.6; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '7') { k = 0.7; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '8') { k = 0.8; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } else if(Recive_Data[3] == '9') { k = 0.9; char My_sentdata[30]; sprintf(My_sentdata,"ok\n"); HAL_UART_Transmit(&huart1,(uint8_t*)My_sentdata,strlen(My_sentdata),50); } EEPROM_Write_Float(0,k); rx_pointer=0; rxflag=false; memset(Recive_Data,0,5); } } void tx_process(void) { static bool already_sent = false; if(Time.Hours == h && Time.Minutes == m && Time.Seconds == s) { if (!already_sent) // 检查是否已经发送过数据 { char My_sentdata[30]; sprintf(My_sentdata,"%.2f+%.1f+%02d%02d%02d\n", val, k, h, m, s); HAL_UART_Transmit(&huart1, (uint8_t*)My_sentdata, strlen(My_sentdata), 50); already_sent = true; // 标记已发送 } } else { already_sent = false; // 当时间改变时重置标志 } } /* USER CODE END 4 */ /** * @brief This function is executed in case of error occurrence. * @retval None */ void Error_Handler(void) { /* USER CODE BEGIN Error_Handler_Debug */ /* User can add his own implementation to report the HAL error return state */ /* USER CODE END Error_Handler_Debug */ } #ifdef USE_FULL_ASSERT /** * @brief Reports the name of the source file and the source line number * where the assert_param error has occurred. * @param file: pointer to the source file name * @param line: assert_param error line source number * @retval None */ void assert_failed(uint8_t *file, uint32_t line) { /* USER CODE BEGIN 6 */ /* User can add his own implementation to report the file name and line number, tex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */ /* USER CODE END 6 */ } #endif /* USE_FULL_ASSERT */ /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
- 330
- 331
- 332
- 333
- 334
- 335
- 336
- 337
- 338
- 339
- 340
- 341
- 342
- 343
- 344
- 345
- 346
- 347
- 348
- 349
- 350
- 351
- 352
- 353
- 354
- 355
- 356
- 357
- 358
- 359
- 360
- 361
- 362
- 363
- 364
- 365
- 366
- 367
- 368
- 369
- 370
- 371
- 372
- 373
- 374
- 375
- 376
- 377
- 378
- 379
- 380
- 381
- 382
- 383
- 384
- 385
- 386
- 387
- 388
- 389
- 390
- 391
- 392
- 393
- 394
- 395
- 396
- 397
- 398
- 399
- 400
- 401
- 402
- 403
- 404
- 405
- 406
- 407
- 408
- 409
- 410
- 411
- 412
- 413
- 414
- 415
- 416
- 417
- 418
- 419
- 420
- 421
- 422
- 423
- 424
- 425
- 426
- 427
- 428
- 429
- 430
- 431
- 432
- 433
- 434
- 435
- 436
- 437
- 438
- 439
- 440
- 441
- 442
- 443
- 444
- 445
- 446
- 447
- 448
- 449
- 450
- 451
- 452
- 453
- 454
- 455
- 456
- 457
- 458
- 459
- 460
- 461
- 462
- 463
- 464
- 465
- 466
- 467
- 468
- 469
- 470
- 471
- 472
- 473
- 474
- 475
- 476
- 477
- 478
- 479
- 480
- 481
- 482
- 483
- 484
- 485
- 486
- 487
- 488
- 489
- 490
- 491
- 492
- 493
- 494
- 495
- 496
- 497
- 498
- 499
- 500
- 501
- 502
- 503
- 504
- 505
- 506
- 507
- 508
- 509
- 510
- 511
- 512
- 513
- 514
- 515
- 516
- 517
- 518
- 519
- 520
- 521
- 522
- 523
- 524
- 525
- 526
- 527
- 528
- 529
- 530
- 531
void key_process(void);
处理按键任务,用户多个界面之间的转换以及上报时间的设置,根据当前lcd的状态,来决定按键按下的功能
void lcd_process(void);
显示各种状态,使用状态机,显示不同状态,使用sprinf函数格式化重定向字符串
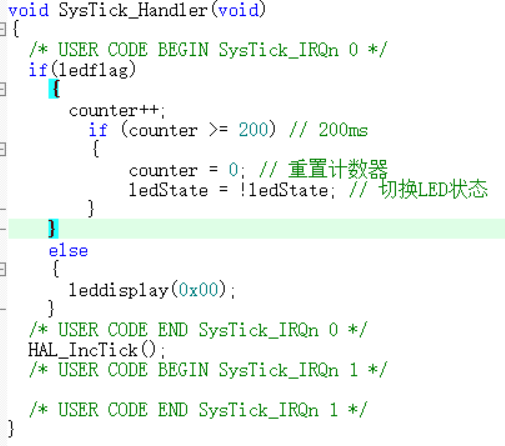
void led_process(void);
控制led闪烁,使用一个计数值,在抵达定时器中++实现200ms计数
void rx_process(void);
控制串口发送的数据,不知为何HAL_UART_Receive_IT(huart, Temp_Data, 1);中如果不是1,就会只能进入一次串口接收回调函数,所以使用每次接收一个然后设置一个缓冲区,控制指针来一次接收5个数据,只有接受完五个数据即进入5次串口接收回调函数后才执行解析函数,注意最后全波清0
void tx_process(void);
控制上报的数据,当rtc时钟的时间到达设置时间发送数据
led.c
#include "led.h"
void leddisplay(uint8_t led)
{
HAL_GPIO_WritePin(GPIOC,GPIO_PIN_All,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOC,led<<8,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOD,GPIO_PIN_2,GPIO_PIN_RESET);
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
该板子是低电平点亮,8个led灯使用的是高8位所以需要左移8位,led等于几就是将高8位中第几位设置成低电平即点亮,由于led与lcd复用引脚最后打开锁存器让值被写入之后,立刻关闭锁存器防止影响lcd
myadc.c
#include "myadc.h"
float get_adc(ADC_HandleTypeDef *hadc)
{
float val;
// 等待ADC转换完成
HAL_ADC_Start(hadc);
val = HAL_ADC_GetValue(hadc);
return val*3.3f/4096;
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
usart1.c
#include "usart1.h" #include "string.h" #include "usart.h" #include "stdbool.h" extern float k; unsigned char Recive_Data[5]; unsigned char Temp_Data[1]; unsigned char rx_pointer = 0; bool rxflag = false; char usartsend[30]; void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart) { if(huart->Instance==USART1) { Recive_Data[rx_pointer++] = Temp_Data[0]; HAL_UART_Receive_IT(huart, Temp_Data, 1); if(Recive_Data[4]!=0) { rxflag = true; } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
接收完四个之后置一个标志位,rx_process才能执行,每次都需调用HAL_UART_Receive_IT函数重新开启串口接收
key.c
#include "key.h" #include "led.h" struct Key key[4]={0,0,0,0}; void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim) { if(htim->Instance==TIM2) { key[0].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_0); key[1].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1); key[2].key_gpio = HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_2); key[3].key_gpio = HAL_GPIO_ReadPin(GPIOA,GPIO_PIN_0); for(int i = 0; i<4;i++) { switch (key[i].key_index) { case 0:/* constant-expression */ { if(key[i].key_gpio==0) { key[i].key_index = 1; } } break; case 1: { if(key[i].key_gpio==0) { key[i].key_index = 2; key[i].key_flag=1; }else{ key[i].key_index = 0; } } case 2: { if(key[i].key_gpio==1) { key[i].key_index=0; } } break; } } } }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
使用状态机,第一次进入之后,进入下一个状态,如果电平还是刚刚的电平说明真的按下,如果不是重新进入第一个状态重新判断,定时器定时时间10ms刚好消抖,最后一个case2是判断如果按键松开,说明可以进入下一次判断。
i2c_hal.c
/* 程序说明: CT117E-M4嵌入式竞赛板GPIO模拟I2C总线驱动程序 软件环境: MDK-ARM HAL库 硬件环境: CT117E-M4嵌入式竞赛板 日 期: 2020-3-1 */ #include "i2c_hal.h" #include "main.h" #define DELAY_TIME 20 /** * @brief SDA线输入模式配置 * @param None * @retval None */ void SDA_Input_Mode() { GPIO_InitTypeDef GPIO_InitStructure = {0}; GPIO_InitStructure.Pin = GPIO_PIN_7; GPIO_InitStructure.Mode = GPIO_MODE_INPUT; GPIO_InitStructure.Pull = GPIO_PULLUP; GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStructure); } /** * @brief SDA线输出模式配置 * @param None * @retval None */ void SDA_Output_Mode() { GPIO_InitTypeDef GPIO_InitStructure = {0}; GPIO_InitStructure.Pin = GPIO_PIN_7; GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_OD; GPIO_InitStructure.Pull = GPIO_NOPULL; GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStructure); } /** * @brief SDA线输出一个位 * @param val 输出的数据 * @retval None */ void SDA_Output( uint16_t val ) { if ( val ) { GPIOB->BSRR |= GPIO_PIN_7; } else { GPIOB->BRR |= GPIO_PIN_7; } } /** * @brief SCL线输出一个位 * @param val 输出的数据 * @retval None */ void SCL_Output( uint16_t val ) { if ( val ) { GPIOB->BSRR |= GPIO_PIN_6; } else { GPIOB->BRR |= GPIO_PIN_6; } } /** * @brief SDA输入一位 * @param None * @retval GPIO读入一位 */ uint8_t SDA_Input(void) { if(HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_7) == GPIO_PIN_SET){ return 1; }else{ return 0; } } /** * @brief I2C的短暂延时 * @param None * @retval None */ static void delay1(unsigned int n) { uint32_t i; for ( i = 0; i < n; ++i); } /** * @brief I2C起始信号 * @param None * @retval None */ void I2CStart(void) { SDA_Output(1); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); SDA_Output(0); delay1(DELAY_TIME); SCL_Output(0); delay1(DELAY_TIME); } /** * @brief I2C结束信号 * @param None * @retval None */ void I2CStop(void) { SCL_Output(0); delay1(DELAY_TIME); SDA_Output(0); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); SDA_Output(1); delay1(DELAY_TIME); } /** * @brief I2C等待确认信号 * @param None * @retval None */ unsigned char I2CWaitAck(void) { unsigned short cErrTime = 5; SDA_Input_Mode(); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); while(SDA_Input()) { cErrTime--; delay1(DELAY_TIME); if (0 == cErrTime) { SDA_Output_Mode(); I2CStop(); return ERROR; } } SDA_Output_Mode(); SCL_Output(0); delay1(DELAY_TIME); return SUCCESS; } /** * @brief I2C发送确认信号 * @param None * @retval None */ void I2CSendAck(void) { SDA_Output(0); delay1(DELAY_TIME); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); SCL_Output(0); delay1(DELAY_TIME); } /** * @brief I2C发送非确认信号 * @param None * @retval None */ void I2CSendNotAck(void) { SDA_Output(1); delay1(DELAY_TIME); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); SCL_Output(0); delay1(DELAY_TIME); } /** * @brief I2C发送一个字节 * @param cSendByte 需要发送的字节 * @retval None */ void I2CSendByte(unsigned char cSendByte) { unsigned char i = 8; while (i--) { SCL_Output(0); delay1(DELAY_TIME); SDA_Output(cSendByte & 0x80); delay1(DELAY_TIME); cSendByte += cSendByte; delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); } SCL_Output(0); delay1(DELAY_TIME); } /** * @brief I2C接收一个字节 * @param None * @retval 接收到的字节 */ unsigned char I2CReceiveByte(void) { unsigned char i = 8; unsigned char cR_Byte = 0; SDA_Input_Mode(); while (i--) { cR_Byte += cR_Byte; SCL_Output(0); delay1(DELAY_TIME); delay1(DELAY_TIME); SCL_Output(1); delay1(DELAY_TIME); cR_Byte |= SDA_Input(); } SCL_Output(0); delay1(DELAY_TIME); SDA_Output_Mode(); return cR_Byte; } // void I2CInit(void) { GPIO_InitTypeDef GPIO_InitStructure = {0}; GPIO_InitStructure.Pin = GPIO_PIN_7 | GPIO_PIN_6; GPIO_InitStructure.Mode = GPIO_MODE_OUTPUT_PP; GPIO_InitStructure.Pull = GPIO_PULLUP; GPIO_InitStructure.Speed = GPIO_SPEED_FREQ_HIGH; HAL_GPIO_Init(GPIOB, &GPIO_InitStructure); } void EEPROM_Write(uint8_t address,uint8_t Data) { I2CStart(); I2CSendByte(0xA0); I2CWaitAck(); I2CSendByte(address); I2CWaitAck(); I2CSendByte(Data); I2CWaitAck(); I2CStop(); } uint8_t EEPROM_Read(uint8_t address) { uint8_t data; I2CStart(); I2CSendByte(0xA0); I2CWaitAck(); I2CSendByte(address); I2CWaitAck(); I2CStop(); I2CStart(); I2CSendByte(0xA1); I2CWaitAck(); data = I2CReceiveByte(); I2CWaitAck(); I2CStop(); return data; } void EEPROM_Write_Float(uint8_t address, float data) { union FloatUnion fu; fu.floatval = data; for(int i = 0; i < sizeof(float); i++) { EEPROM_Write(address + i, fu.bytes[i]); HAL_Delay(5); } } float EEPROM_Read_Float(uint8_t address) { union FloatUnion fu; for(int i = 0; i < sizeof(float); i++) { fu.bytes[i] = EEPROM_Read(address + i); } return fu.floatval; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
- 215
- 216
- 217
- 218
- 219
- 220
- 221
- 222
- 223
- 224
- 225
- 226
- 227
- 228
- 229
- 230
- 231
- 232
- 233
- 234
- 235
- 236
- 237
- 238
- 239
- 240
- 241
- 242
- 243
- 244
- 245
- 246
- 247
- 248
- 249
- 250
- 251
- 252
- 253
- 254
- 255
- 256
- 257
- 258
- 259
- 260
- 261
- 262
- 263
- 264
- 265
- 266
- 267
- 268
- 269
- 270
- 271
- 272
- 273
- 274
- 275
- 276
- 277
- 278
- 279
- 280
- 281
- 282
- 283
- 284
- 285
- 286
- 287
- 288
- 289
- 290
- 291
- 292
- 293
- 294
- 295
- 296
- 297
- 298
- 299
- 300
- 301
- 302
- 303
- 304
- 305
- 306
- 307
- 308
- 309
- 310
- 311
- 312
- 313
- 314
- 315
- 316
- 317
- 318
- 319
- 320
- 321
- 322
- 323
- 324
- 325
- 326
- 327
- 328
- 329
只有最后四个函数是本人写的,其余为蓝桥杯官方提供,主要是两种i2c时序,指定地址写和指定地址读的时序,重点在读需要首先写入要读取的地址之后再开始读,浮点数的存储使用联合体union
floatval和bytes数组共用内存
可以看本人文章stm32教程中有对i2c四种时序的说明
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/56969
推荐阅读
相关标签

