
- 1在执行bat脚本的时候打印日志
- 2STM32调试FM24C04B-G心得及注意事项,解决不应答等_stm32读写24c04
- 3如何在 Python 开发环境中调用 ChatGPT 模型?_python调用chatgpt接口的
- 4Spring5设计模式 - 原型模式_spring 原型模式
- 5配置Python和Pycharm环境_pycharm previously configured
- 6启动mysql时报错“/etc/init.d/mysqld: Permission denied“
- 7STM32bootloader原理解释_stm32 nrst复位入口地址可以改吗
- 8python学习笔记(27)——pdfplumber库提取文本及表格内容基础操作_extract_tables
- 9Tomcat介绍使用+JavaWeb创建+打成war包部署_使用tomcat打包部署步骤
- 10TPC-DS用于Clickhouse和Doris性能测试_tpc-ds clickhouse
1.如何安装实训环境以及在gec6818开发板上运行代码
赞
踩
一、ARM6818项目实训
项目:基于6818开发板结合传感器实现电子相册和简易环境监测
涉及到的知识点:C语言 交叉开关 文件IO linux的使用
开发环境:
项目安排
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-5WMBPhgb-1686927540765)(pic/image-20230605104934976.png)]](https://img-blog.csdnimg.cn/5ffa40c6c2e04fa194449dee18dbc27d.png)
二、搭建开发环境
1.安装虚拟机并运行Ubuntu系统
安装 VMware虚拟机,解压Ubuntu18.04,运行VMware,
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-HIYdTNss-1686927540767)(pic/1684115254851.png)]](https://img-blog.csdnimg.cn/6ec5c375059e460a888ee6fbafb378f2.png)
选择“打开虚拟机”,找到解压的ubutnu18.04中的虚拟系统文件 将其在vmware中打开即可
(第一次打开虚拟,在开机时会询问您 是否已经备份虚拟机,选择 “我已经复制” 即可)
Ubuntu18.04开机后,登录密码: 123456 (密码也是Ubuntu系统执行sudo命令时的密码)
2.设置共享文件夹
此共享文件夹是借助vmware提供的 VMware Tools工具,实现 宿主机 与 虚拟机两个系统之间的文件共享
简单来说:将Windows的一个 文件夹 共享给 Ubuntu访问
比如: 将 “指定文件夹”(一般共享上课笔记的文件夹) 共享给Ubuntu
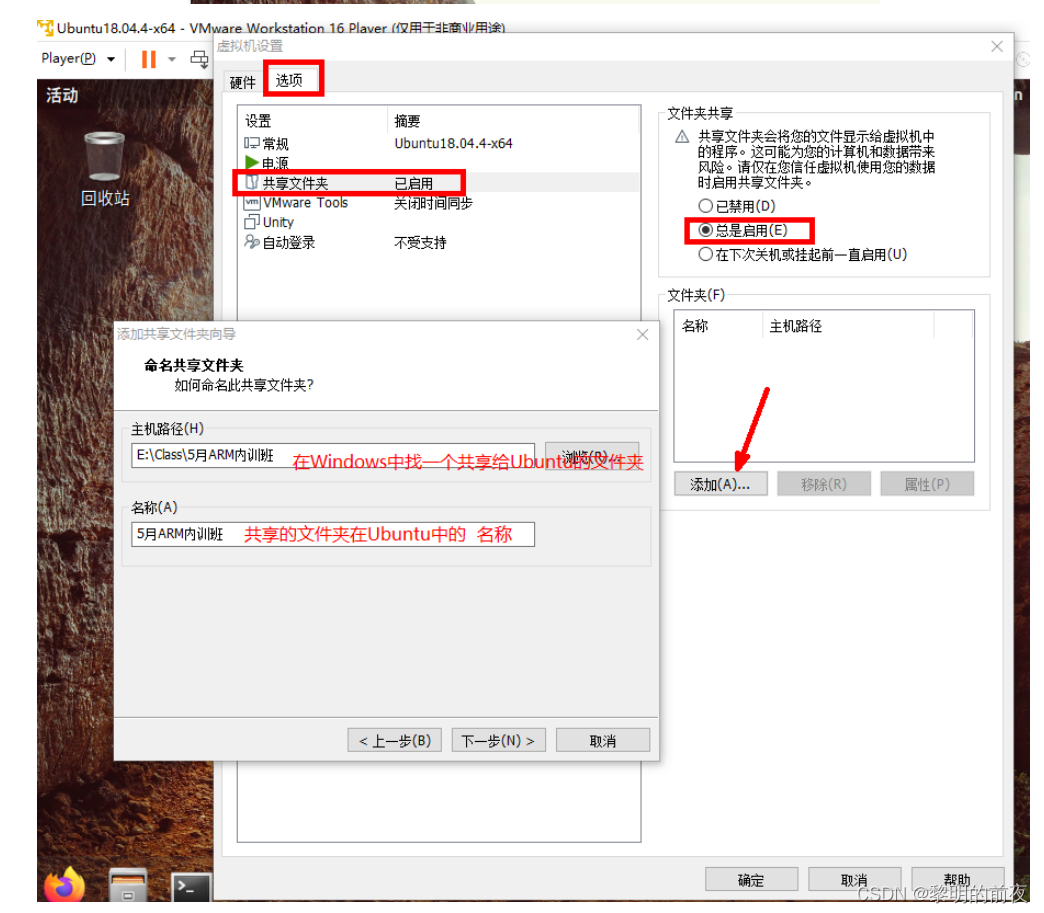
共享文件夹在Ubuntu中的位置: /mnt/hgfs/文件夹名称
比如 上述共享文件夹的位置: /mnt/hgfs/5月ARM内训班
也可以通过UI界面去访问:文件 -》 其他位置 -》 计算机 -》 mnt -》 hgfs
(设置共享文件夹,只是为了方便在Ubuntu中访问Windows中的文件)
3.Ubuntu终端和Linux命令
在嵌入式开发中,使用命令来完成操作,比直接使用UI界面访问要多
因此作为一个嵌入式工程师,必须掌握Linux的基本命令 以及 各系统执行命令的程序
在Ubuntu中,Linux的命令是在 终端上的命令行中执行,可以通过 Ctrl+Alt+T 来打开 Ubuntu的终端,也可以点快捷栏上黑不溜秋的图标 打开 终端:
打开 终端:

其中“工作路径”是需要注意的,决定了 执行命令时所处的位置,有几个特殊的路径
- ~ 表示用户主目录,全路径 : /home/china ,用户对在该目录下的文件具有所有权限,不需要sudo就能访问任何文件
- / 表示根目录,是Linux文件的起始位置,Linux的文件系统是采用的 树状结构,所有的路径都是以 / 根目录开始
常用的Linux命令
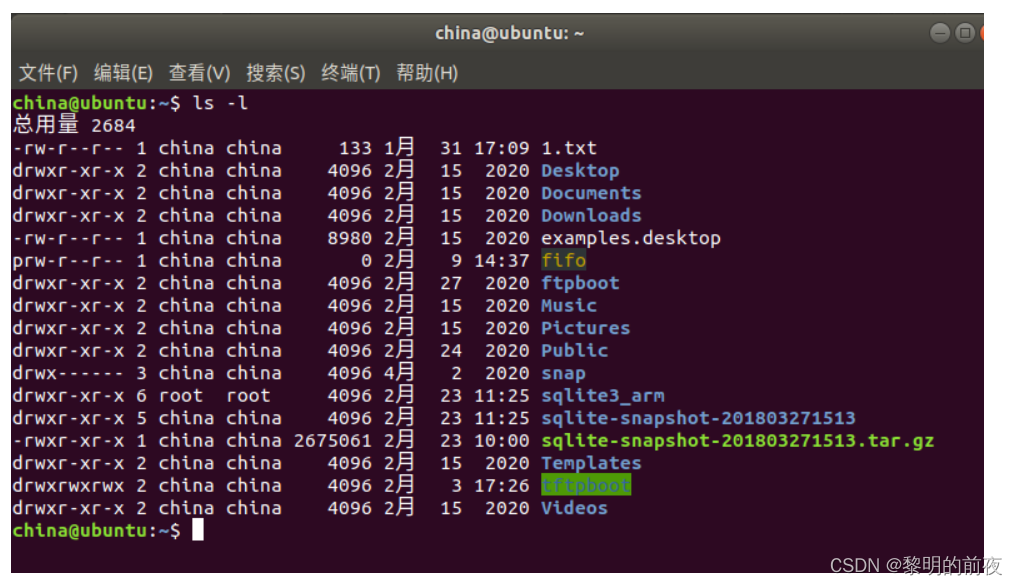
1)ls 列举
可以用来查看当前工作路径下所有的文件信息,如果想要查看详细信息,可以使用 ls -l
eg:查看文件及详细信息
ls -l
- 1
eg:查看文件名
ls
- 1

2)cd 目录路径
用来切换终端的工作路径到 指定目录中去
比如:切换工作路径到我的共享目录
cd /mnt/hgfs/5月ARM内训班
- 1
(命令行上输入命令或路径时,可以通过 Tab键获取提示 或 补全)
![[外链图片转存失败,源站可能有防盗链机制,建议将图片保存下来直接上传(img-i1OSBFhI-1686927540774)(pic/1684117632392.png)]](https://img-blog.csdnimg.cn/c85b624900ce499890a11a7d8e528260.png)
3)常用文件操作命令
cp 1.txt 2.txt => 将 1.txt文件复制一份为 2.txt
mv 1.txt 2.txt => 将 1.txt 移动成 2.txt (重命名)
rm -rf 1.txt => remove 以 递归强制性的删除 1.txt文件
- 1
- 2
- 3
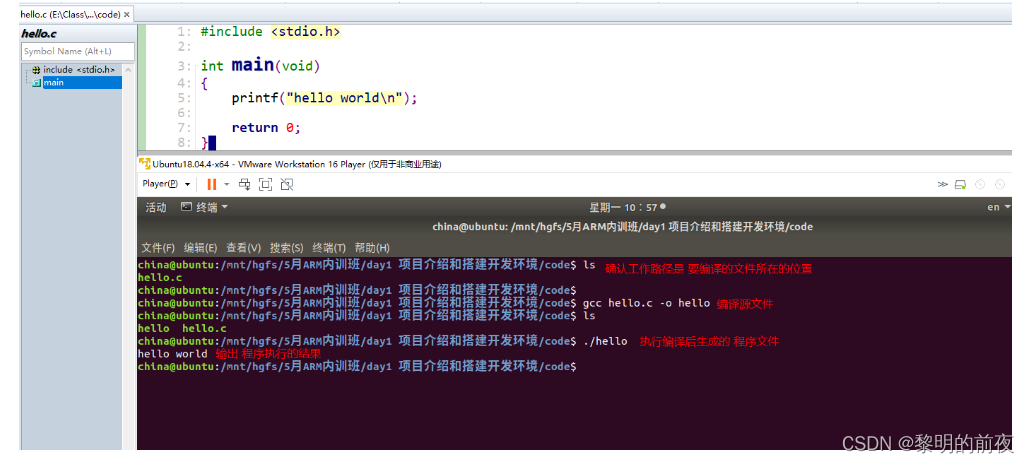
4)C程序编译命令
本地编译(x86)
将C语言源代码文件,编译为 x86-Linux可以运行的程序文件
命令格式:
gcc 要编译的源文件 -o 生成的执行文件名 -I头文件搜索路径 -L库文件搜索路径 -l库名
- 1
比如:编译 hello.c
(如果没有引用 第三方头文件 和 第三方库文件,则可以不需要后面三段)
gcc hello.c -o hello
- 1
练习:
-
编写C语言程序,实现1到100求和,并在Ubuntu中编译运行
- 在共享文件夹中,创建.c文件,并且编写代码
- 在Ubuntu的命令行上切换工作路径到 .c文件所在的目录(文件夹)
- 编译.c文件生成程序文件
- 执行程序文件
交叉编译(ARM)
交叉编译命令 arm-linux-gcc,其用法与gcc 一模一样
只不过两者编译出来的程序,适用的 CPU架构不同
gcc编译的程序,只能在 x86的Linux中运行 比如在Ubuntu中运行
arm-linux-gcc 编译的程序,只能在 ARM的Linux中运行,比如 GEC6818开发板
(放在上板子后再讲)
4.C语言的编程规范
-
对齐和缩进:C语言代码从顶格开始写,遇上{ } 则被括起来的内容要比{ }缩进一个Tab或4个空格
-
复合语句:if/for/while/switch/…… 无论管辖的语句有多少,都必须带 { },并且{ } 各占一行,同时要求与 复合语句的首字母对齐
每个语句各占一行
-
必要的注释:一个合格的程序,有效注释量不能低于 30%
比如: 求 1-100的和
#include <stdio.h> /* * main:主函数,用来求解1到100的和,并输出最终结果 * arg: * NONE * return: * 成功返回 0 * 失败返回 -1 **/ int main(void) { int i = 0; int sum = 0; /* 循环计数1到100 */ for(i=1;i<=100;i++) { sum += i; //将1到100累加到sum变量中 } printf("1到100的和是:%d\n",sum); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
(可以用 vi 打开文件,从键盘键入 gg=GG ,然后键入 :wq 回车 )
三、交叉开发(上板子)
交叉开发是指 在搭建了开发环境的宿主机上编写编译源代码文件,并生成目标平台何以运行的程序文件,并将该文件传输到目标平台运行的过程
宿主机:Windows(通过虚拟机 运行了 Ubuntu系统)
目标平台:GEC6818开发板,芯片采用的三星的S5P6818,8核处理器(8*ARM Cortex-A53),系统主频1.8GHz,机载内存8G(有6G隐藏未挂载)
1.硬件接线:
5V-3A电源是配置、DB9串口+USB转串口线
软件:SecureCRT + CH340串口驱动
2.安装驱动: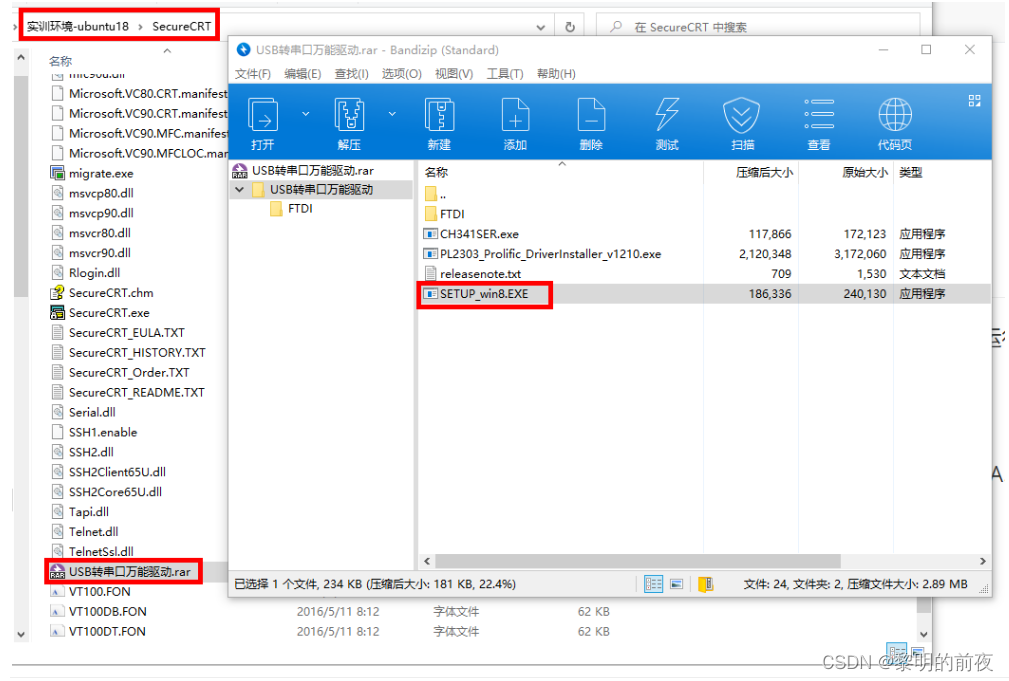
用串口线将开发板和PC链接后,双击安装即可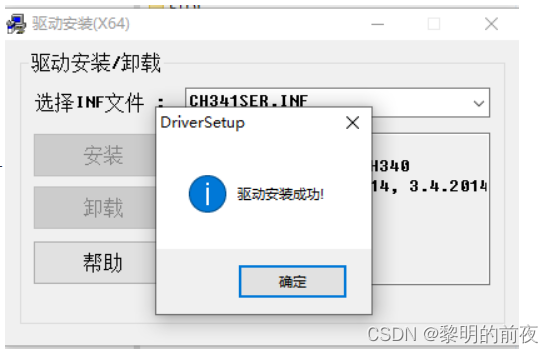
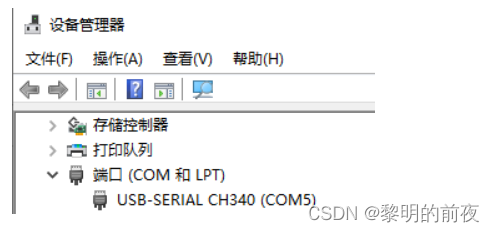
安装成功后,可以到设备管理器 -》 端口 中 获取该串口的 端口号
3.使用SecureCRT链接开发板后台
打开SecureCRT.exe:
打开标签页,如果标签页中没有您的 端口链接,则新建一个,如下所示
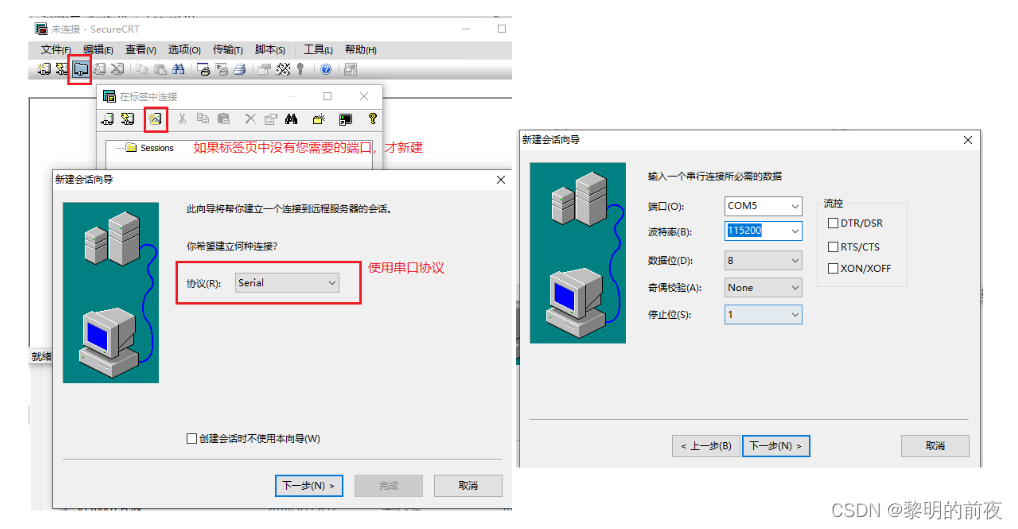
选择自己的端口进行链接
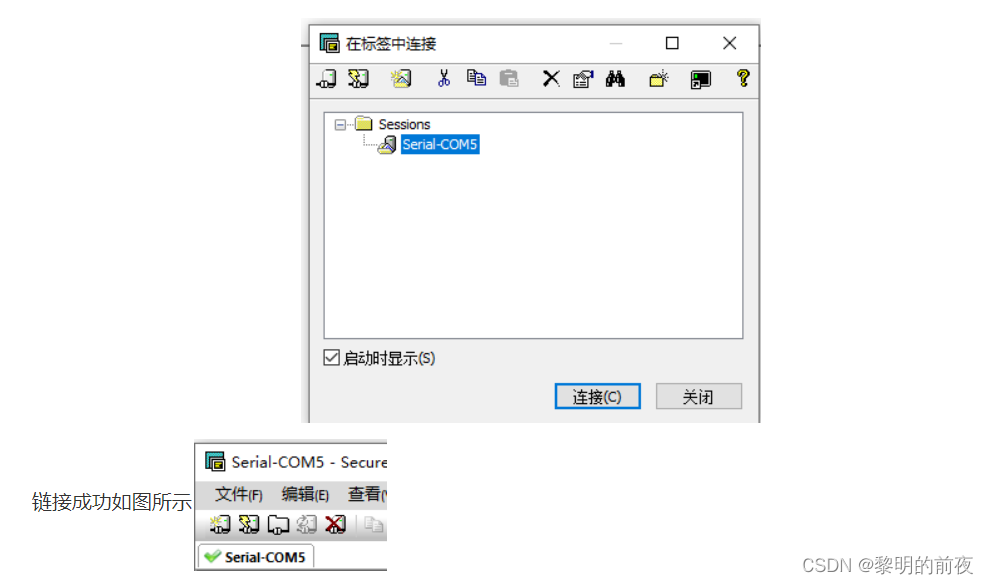
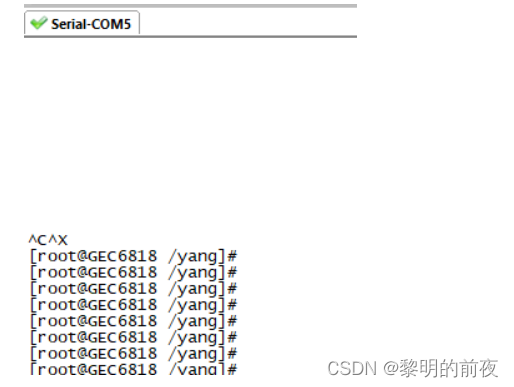
将开发板开机,就可以在 SecureCRT中,看到开发板的后台信息(开机时会出现一个倒计时,此时请不要按任何按键,否则会进入 uboot模式)
等待开机完成后,键入 Ctrl + C 可以 唤出 ARM板的后台命令行
(第一次使用开发板,建议学生 切换到主目录后,创建一个属于自己的 工作目录) ==》 以便后续删除
cd ~ => 切换到主目录
mkdir oyhl =>创建一个 oyhl 目录
cd ~/oyhl => 提醒学生每次开机都先执行,切换到自己的工作目录
- 1
- 2
- 3
4.交叉开发的操作流程
-
编写源代码文件
比如: hello.c
-
交叉编译
将源代码文件 编译为目标平台可以执行的程序文件
arm-linux-gcc hello.c -o hello_arm- 1
-
将程序文件传输到 ARM板
在 SecureCRT的开发板的后台终端命令行上,执行传输命令 rx 来从PC中获取文件
rx 文件名- 1
比如:
rx hello_arm- 1
执行上述命令后 会激活 SecureCRT的文件传输机制,用户需要点击 菜单栏上的 ”传输“ —》 ”发送 xModue“ --》找到要传输的文件 即可开始传输
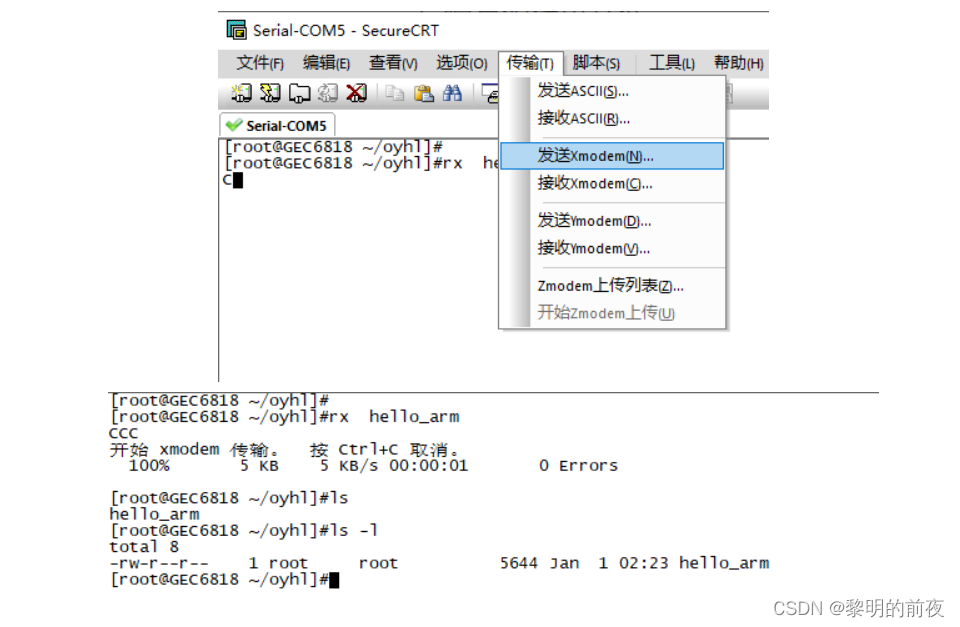
上述传输完成后查看了文件的信息,发现刚传输过来的文件是 没有 可执行权限的
如果 传输的是程序文件,就还需要增加 可执行权限
-
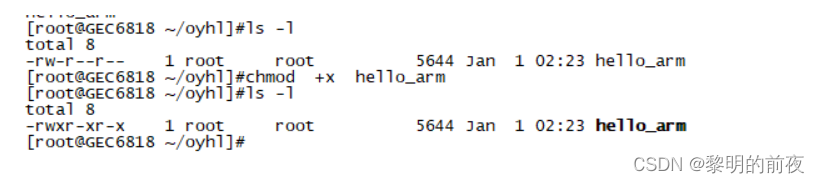
修改文件权限
使用命令 chmod 可以修改指定文件的权限
格式:
chmod 权限码 文件名- 1
其中:
权限码可以是 3位八进制数表示
比如: 0777 =》 111 111 111 rwxrwxrwx => 用户 可读可写可执行 ,组用户 可读可写可执行,其他用户 可读可写可执行
或者也可以用 单个权限表示
比如: +x 表示给指定文件的所有用户,增加可执行权限
chmod 0777 hello_arm chmod +x hello_arm- 1
- 2
- 3
-
执行程序
./程序文件名- 1
请编写一个打印杨辉三角的程序,交叉编译后,在ARM板上运行
》 111 111 111 rwxrwxrwx => 用户 可读可写可执行 ,组用户 可读可写可执行,其他用户 可读可写可执行
或者也可以用 单个权限表示
比如: +x 表示给指定文件的所有用户,增加可执行权限
chmod 0777 hello_arm
chmod +x hello_arm
- 1
- 2
- 3
[外链图片转存中…(img-7Y4pOkx4-1686927540783)]
-
执行程序
./程序文件名- 1

