
热门标签
热门文章
- 12023年数学建模C题论文及处理数据代码_2023年数学建模c题成品论文
- 2数据挖掘电子书下载
- 3数据中台与业务中台总体技术架构设计方案_业务中台与本地主数据集成方案
- 4leetcode刷题之树专题
- 5【LeetCode】树专题_大雪菜王leetcode
- 6【力扣每日一题】最长快乐字符串_s是一个尽可能长的字符串
- 7react项目关闭sourcemap_react 设置souremap为false
- 8Lambda表达式讲解
- 9从此告别繁琐的模型微调,LLM-Adapters助力NLP任务快速高效微调!
- 102024年最全ElasticSearch数据迁移方法介绍_elasticsearch 数据迁移_elasticsearch 迁移
当前位置: article > 正文
c++获取系统pcm_论文笔记 | Kimera实时度量语义SLAM开源系统
作者:花生_TL007 | 2024-06-13 05:18:49
赞
踩
pairwise consistent measurement pcm算法
论文地址
https://arxiv.org/abs/1910.02490v3论文总结和摘要:
Kimera是一个开源的C++实时语义SLAM系统,提供了:
视觉惯性状态估计(VIO模块)
全局一致的相机轨迹估计(姿态图优化器 PGO)
用于快速避障的低延时的局部网格地图(轻量级的3D网格重建模块)
全局语义标注的3D网格地图(稠密的3D语义重建模块)
kimera使用相机图像和惯导数据来构建语义注释的3D环境网格.
和现有的视觉-惯导SLAM库(例如ORB-SLAM、VINS-Mono、OKVIS、ROVIO)比较,Kimera是模块化结构,支持ROS,在CPU上运行.
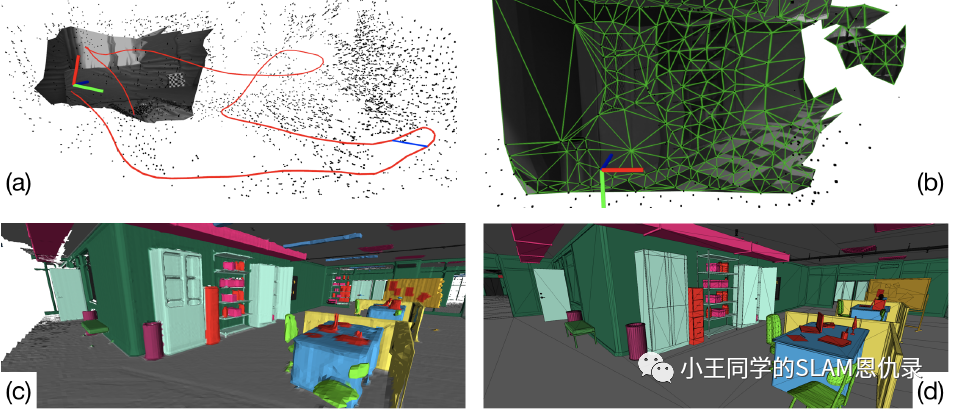
如上图所示
- 图(a) 以IMU帧率进行视觉惯导状
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/711026
推荐阅读
相关标签

