
热门标签
热门文章
- 1JavaScript基础(前端的知识,很详细,很详细,很详细)_javascript前端
- 2太强了,英伟达面对ChatGPT还有这一招..._英伟达chat gpt
- 3MSCOMCTL.OCX文件缺少找不到如何解决的?
- 4如何为JBoss Developer Studio 8设置BPM和规则工具
- 5设计模式学习笔记 - 设计模式与范式 -结构型:3.装饰器模式
- 6springboot actuator 监控组件应用
- 7汽车自动驾驶是人工智能吗,自动驾驶是人工智能_无人驾驶和人工智能的关系
- 8tp5.0路由配置及thinkphp5.1使用Route路由说明
- 9FISCO BCOS区块链平台上的智能合约压力测试指南_fisco-bcos
- 10图神经网络综述_ggn和gan
当前位置: article > 正文
Unet模型及代码解析_unet转置卷积代码
作者:花生_TL007 | 2024-04-02 06:37:45
赞
踩
unet转置卷积代码
Unet模型及代码解析
Paper:http://www.arxiv.org/pdf/1505.04597.pdf
Code:https://github.com/jakeret/tf_unet
一个U型网络结构,2015年在图像分割领域大放异彩,unet被大量应用在分割领域。它是在FCN的基础上构建,它的U型结构解决了FCN无法上下文的信息和位置信息的弊端。
模型
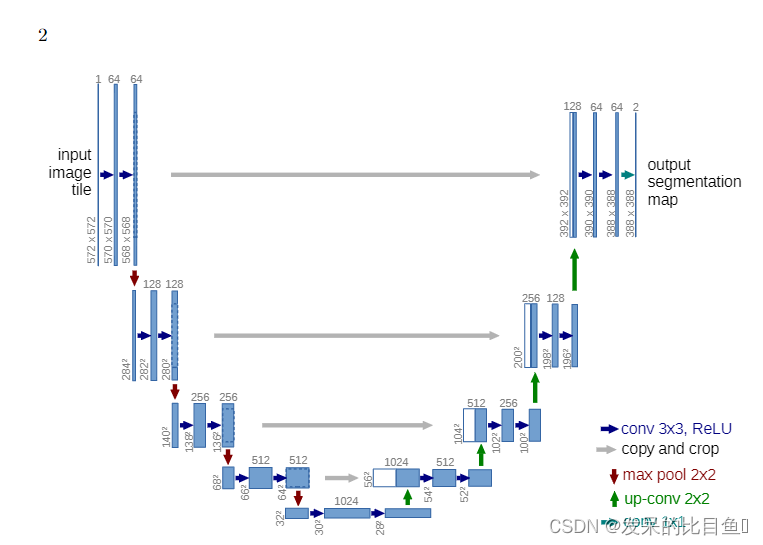
主干结构解析
左边为特征提取网络(编码器),右边为特征融合网络(解码器)
高分辨率—编码—低分辨率—解码—高分辨率
前半部分是编码, 它的作用是特征提取(获取局部特征,并做图片级分类),得到抽象语义特征
由两个3x3的卷积层(RELU)再加上一个2x2的maxpooling层组成一个下采样的模块,一共经过4次这样的操作
后半部分利用前面编码的抽象特征来恢复到原图尺寸的过程, 最终得到分割结果(掩码图片)。由一层反卷积+特征拼接concat+两个3x3的卷积层(ReLU)反复构成,一共经过4次这样的操作,与特征提取网络刚好相对应,最后接一层1*1卷积,降维处理,即将通道数降低至特定的数量,得到目标图。
FCN与UNet特征融合操作对比解析
- FCN是通过特征图对应像素值的相加来融合特征的, 利用上采样对最后一层特征图进行上采样的话,会损失很多细节,边缘模糊,使用跳跃结构,将最后一层的预测(有丰富的全局信息)和更浅层(有更多的局部细节)的预测结合起来(sum 方式),可以恢复细节信息。
上采样
上采样的三种方式
(1)双线性插值:特点是不需要进行学习,运行速度快,操作简单
(2)反卷积:也叫转置卷积,外圈或中间补零
(3)反池化:记录池化过程中元素在对应 kernel 中的坐标,作为反池化的索引
代码
import torch from torch import nn from torch.nn import functional as F#插值法上采样 class Conv_Block(nn.Module): def __init__(self,in_channel,out_channel): super(Conv_Block, self).__init__() self.layer=nn.Sequential( nn.Conv2d(in_channel,out_channel,3,1,1,padding_mode='reflect',bias=False),#卷积3*3,步长为1,padding为1 nn.BatchNorm2d(out_channel), nn.Dropout2d(0.3), nn.LeakyReLU(), nn.Conv2d(out_channel, out_channel, 3, 1, 1, padding_mode='reflect', bias=False), nn.BatchNorm2d(out_channel), nn.Dropout2d(0.3), nn.LeakyReLU() ) def forward(self,x): return self.layer(x) class DownSample(nn.Module):#池化(下采样) def __init__(self,channel): super(DownSample, self).__init__() self.layer=nn.Sequential(#序列构造器 nn.Conv2d(channel,channel,3,2,1,padding_mode='reflect',bias=False),#这里不采用最大池化,最大池化特征丢失太多,所以采用步长为2 nn.BatchNorm2d(channel), nn.LeakyReLU() ) def forward(self,x): return self.layer(x) class UpSample(nn.Module):#上采样 def __init__(self,channel): super(UpSample, self).__init__() self.layer=nn.Conv2d(channel,channel//2,1,1)#1*1卷积,降低通道,无需特征提取,只是降通道数 def forward(self,x,feature_map): up=F.interpolate(x,scale_factor=2,mode='nearest')#最邻近插值法 out=self.layer(up) return torch.cat((out,feature_map),dim=1) class UNet(nn.Module): def __init__(self,num_classes): super(UNet, self).__init__() self.c1=Conv_Block(3,64) self.d1=DownSample(64) self.c2=Conv_Block(64,128) self.d2=DownSample(128) self.c3=Conv_Block(128,256) self.d3=DownSample(256) self.c4=Conv_Block(256,512) self.d4=DownSample(512) self.c5=Conv_Block(512,1024) self.u1=UpSample(1024) self.c6=Conv_Block(1024,512) self.u2 = UpSample(512) self.c7 = Conv_Block(512, 256) self.u3 = UpSample(256) self.c8 = Conv_Block(256, 128) self.u4 = UpSample(128) self.c9 = Conv_Block(128, 64) self.out=nn.Conv2d(64,num_classes,3,1,1) def forward(self,x): R1=self.c1(x) R2=self.c2(self.d1(R1)) R3 = self.c3(self.d2(R2)) R4 = self.c4(self.d3(R3)) R5 = self.c5(self.d4(R4)) O1=self.c6(self.u1(R5,R4)) O2 = self.c7(self.u2(O1, R3)) O3 = self.c8(self.u3(O2, R2)) O4 = self.c9(self.u4(O3, R1)) return self.out(O4) if __name__ == '__main__': x=torch.randn(2,3,256,256) net=UNet() print(net(x).shape)

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/351103
推荐阅读
相关标签

