
- 1麒麟V10最小化安装,升级至图形化_麒麟系统v10怎么从最小化安装进入到图像化
- 2增强代码安全性:使用LLM进行主动漏洞检测的奖励与风险_llm解决安全漏洞
- 3从爬取微博中搜索的热门事件到数据分析处理全过程(一)_爬虫微博构建事件发展脉络
- 4华为OD机试统一考试D卷C卷 - 找座位(C++ Java JavaScript Python C语言)_找座位od
- 5python listnode类_简单介绍四种Python 列表反转显示的方法
- 6执行sh文件 进行MongoDB的业务逻辑导入
- 7[附源码]java+ssm计算机毕业设计磐基建筑机械租赁有限公司机械租赁系统41c32(源码+程序+数据库+部署)_建筑设备租赁软件源码 下载
- 8JAVA界面开发_java建立界面
- 9python 去趋势detrend_python detrend
- 10SOME/IP 详解系列(2)—— 报文格式_someip 报文
ROS2:如何将Cartographer和Navigation2一起使用(2):使用纯定位和Nav2进行导航_amcl和cartographer
赞
踩
ROS2中的navigation2使用AMCL和map_server来估计自己的位置并自主移动。
map_server发布/map主题,AMCL根据/map和雷达的/scan、里程计/odom信息估计自己的位置,并将/tf发布到/odom。
通过将AMCL和map_server分别替换成cartographer_node、cartographer_occupancy_grid_node而不是AMCL,Cartographer可以单独进行纯定位并在导航中运行它,同时估计自己的位置。
实现在ROS2中的Cartographer纯定位可以在上篇文章中发现,本文将讲解Cartographer替换AMCL配合Nav2实现导航仿真。
ROS2:如何将Cartographer和Navigation2一起使用(1):从SLAM到纯定位_什么都不会的码小白的博客-CSDN博客
Nav2操作
首先检查Navigation2默认状态下的操作。
- export TURTLEBOT3_MODEL=burger
- ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
当在Gazebo环境中运行Nav2时,务必将use_sim_time设置为true。
运行turtlebot3包中的navigation2.launch可以使用下面的命令。
- export TURTLEBOT3_MODEL=burger
- ros2 launch turtlebot3_navigation2 navigation2.launch.py use_sim_time:=true
单击Rviz命令面板上的2D Pose Estimate设置初始位置,然后用Nav2 Goal拖动地图上的目标位置,使用Turtlebot3向目标位置移动。
创建启动文件启动Cartographer和Nav2
Nav2中的bringup_launch.py是在navigation2.launch.py中调用的,而执行amcl和map_server的localization_launch.py是在bringup_launch.py中执行的。
通过重写bringup_launch.py来创建新的启动文件,以运行上一篇文章中创建的cartographer_localization.launch.py而不是localization_launch。
在launch文件夹下创建一个新的启动文件bringup_launch_cartographer.launch.py,以下是启动文件内容的示例。
- import os
-
- from ament_index_python.packages import get_package_share_directory
-
- from launch import LaunchDescription
- from launch.actions import (DeclareLaunchArgument, GroupAction,
- IncludeLaunchDescription, SetEnvironmentVariable)
- from launch.conditions import IfCondition
- from launch.launch_description_sources import PythonLaunchDescriptionSource
- from launch.substitutions import LaunchConfiguration, PythonExpression
- from launch_ros.actions import Node
- from launch_ros.actions import PushRosNamespace
- from nav2_common.launch import RewrittenYaml
-
-
- def generate_launch_description():
- # Get the launch directory
- bringup_dir = get_package_share_directory('nav2_bringup')
- launch_dir = os.path.join(bringup_dir, 'launch')
- cartographer_launch_dir = os.path.join(get_package_share_directory('turtlebot3_cartographer'), 'launch')
-
- # Create the launch configuration variables
- namespace = LaunchConfiguration('namespace')
- use_namespace = LaunchConfiguration('use_namespace')
- slam = LaunchConfiguration('slam')
- map_yaml_file = LaunchConfiguration('map')
- use_sim_time = LaunchConfiguration('use_sim_time')
- params_file = LaunchConfiguration('params_file')
- autostart = LaunchConfiguration('autostart')
- use_composition = LaunchConfiguration('use_composition')
- use_respawn = LaunchConfiguration('use_respawn')
- log_level = LaunchConfiguration('log_level')
-
- remappings = [('/tf', 'tf'),
- ('/tf_static', 'tf_static')]
-
- configured_params = RewrittenYaml(
- source_file=params_file,
- root_key=namespace,
- param_rewrites={},
- convert_types=True)
-
- stdout_linebuf_envvar = SetEnvironmentVariable(
- 'RCUTILS_LOGGING_BUFFERED_STREAM', '1')
-
- declare_namespace_cmd = DeclareLaunchArgument(
- 'namespace',
- default_value='',
- description='Top-level namespace')
-
- declare_use_namespace_cmd = DeclareLaunchArgument(
- 'use_namespace',
- default_value='false',
- description='Whether to apply a namespace to the navigation stack')
-
- declare_map_yaml_cmd = DeclareLaunchArgument(
- 'map',
- default_value='',
- description='Full path to map yaml file to load')
-
- declare_use_sim_time_cmd = DeclareLaunchArgument(
- 'use_sim_time',
- default_value='false',
- description='Use simulation (Gazebo) clock if true')
-
- declare_params_file_cmd = DeclareLaunchArgument(
- 'params_file',
- default_value=os.path.join(bringup_dir, 'params', 'nav2_params.yaml'),
- description='Full path to the ROS2 parameters file to use for all launched nodes')
-
- declare_autostart_cmd = DeclareLaunchArgument(
- 'autostart', default_value='true',
- description='Automatically startup the nav2 stack')
-
- declare_use_composition_cmd = DeclareLaunchArgument(
- 'use_composition', default_value='True',
- description='Whether to use composed bringup')
-
- declare_use_respawn_cmd = DeclareLaunchArgument(
- 'use_respawn', default_value='False',
- description='Whether to respawn if a node crashes. Applied when composition is disabled.')
-
- declare_log_level_cmd = DeclareLaunchArgument(
- 'log_level', default_value='info',
- description='log level')
-
- # Specify the actions
- bringup_cmd_group = GroupAction([
- PushRosNamespace(
- condition=IfCondition(use_namespace),
- namespace=namespace),
-
- Node(
- condition=IfCondition(use_composition),
- name='nav2_container',
- package='rclcpp_components',
- executable='component_container_isolated',
- parameters=[configured_params, {'autostart': autostart}],
- arguments=['--ros-args', '--log-level', log_level],
- remappings=remappings,
- output='screen'),
-
- IncludeLaunchDescription(
- PythonLaunchDescriptionSource(os.path.join(cartographer_launch_dir,
- 'cartographer_localization.launch.py'))),
-
- IncludeLaunchDescription(
- PythonLaunchDescriptionSource(os.path.join(launch_dir, 'navigation_launch.py')),
- launch_arguments={'namespace': namespace,
- 'use_sim_time': use_sim_time,
- 'autostart': autostart,
- 'params_file': params_file,
- 'use_composition': use_composition,
- 'use_respawn': use_respawn,
- 'container_name': 'nav2_container'}.items()),
- ])
-
- # Create the launch description and populate
- ld = LaunchDescription()
-
- # Set environment variables
- ld.add_action(stdout_linebuf_envvar)
-
- # Declare the launch options
- ld.add_action(declare_namespace_cmd)
- ld.add_action(declare_use_namespace_cmd)
- ld.add_action(declare_map_yaml_cmd)
- ld.add_action(declare_use_sim_time_cmd)
- ld.add_action(declare_params_file_cmd)
- ld.add_action(declare_autostart_cmd)
- ld.add_action(declare_use_composition_cmd)
- ld.add_action(declare_use_respawn_cmd)
- ld.add_action(declare_log_level_cmd)
-
- # Add the actions to launch all of the navigation nodes
- ld.add_action(bringup_cmd_group)
-
- return ld

对比bringup_launch.py,添加以下部分。
- cartographer_launch_dir = os.path.join(get_package_share_directory('turtlebot3_cartographer'), 'launch')
-
- IncludeLaunchDescription(
- PythonLaunchDescriptionSource(os.path.join(cartographer_launch_dir,
- 'cartographer_localization.launch.py'))),
创建一个新的bringup_launch,启动bringup_launch_cartographer.launch.py。
*map.yaml 由于不需要pgm,所以与map_dir相关的部分已被删除。
相应的navigation2_cartographer.launch.py代码如下。
- import os
-
- from ament_index_python.packages import get_package_share_directory
- from launch import LaunchDescription
- from launch.actions import DeclareLaunchArgument
- from launch.actions import IncludeLaunchDescription
- from launch.launch_description_sources import PythonLaunchDescriptionSource
- from launch.substitutions import LaunchConfiguration
- from launch_ros.actions import Node
-
- TURTLEBOT3_MODEL = os.environ['TURTLEBOT3_MODEL']
-
- def generate_launch_description():
- use_sim_time = LaunchConfiguration('use_sim_time', default='false')
- param_file_name = TURTLEBOT3_MODEL + '.yaml'
- param_dir = LaunchConfiguration(
- 'params_file',
- default=os.path.join(
- get_package_share_directory('turtlebot3_navigation2'),
- 'param',
- param_file_name))
-
- nav2_launch_file_dir = os.path.join(get_package_share_directory('turtlebot3_navigation2'), 'launch')
-
- rviz_config_dir = os.path.join(
- get_package_share_directory('nav2_bringup'),
- 'rviz',
- 'nav2_default_view.rviz')
-
- return LaunchDescription([
- DeclareLaunchArgument(
- 'params_file',
- default_value=param_dir,
- description='Full path to param file to load'),
-
- DeclareLaunchArgument(
- 'use_sim_time',
- default_value='false',
- description='Use simulation (Gazebo) clock if true'),
-
- IncludeLaunchDescription(
- PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch_cartographer.launch.py']),
- launch_arguments={
- 'use_sim_time': use_sim_time,
- 'params_file': param_dir}.items(),
- ),
-
- Node(
- package='rviz2',
- executable='rviz2',
- name='rviz2',
- arguments=['-d', rviz_config_dir],
- parameters=[{'use_sim_time': use_sim_time}],
- output='screen'),
- ])
-
运行
- export TURTLEBOT3_MODEL=burger
- ros2 launch turtlebot3_gazebo turtlebot3_world.launch.py
- export TURTLEBOT3_MODEL=burger
- ros2 launch turtlebot3_navigation2 navigation2_cartographer.launch.py use_sim_time:=true
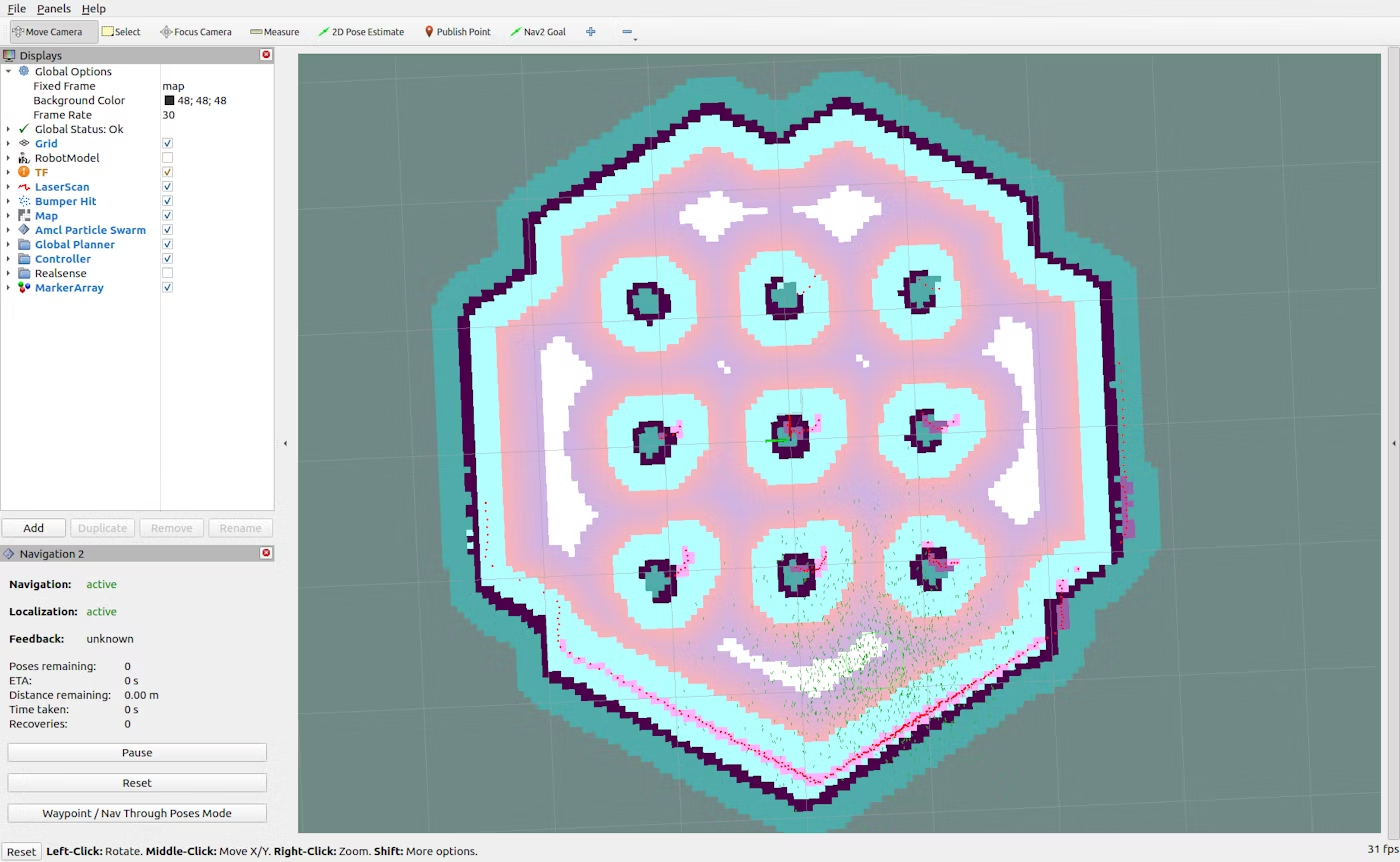
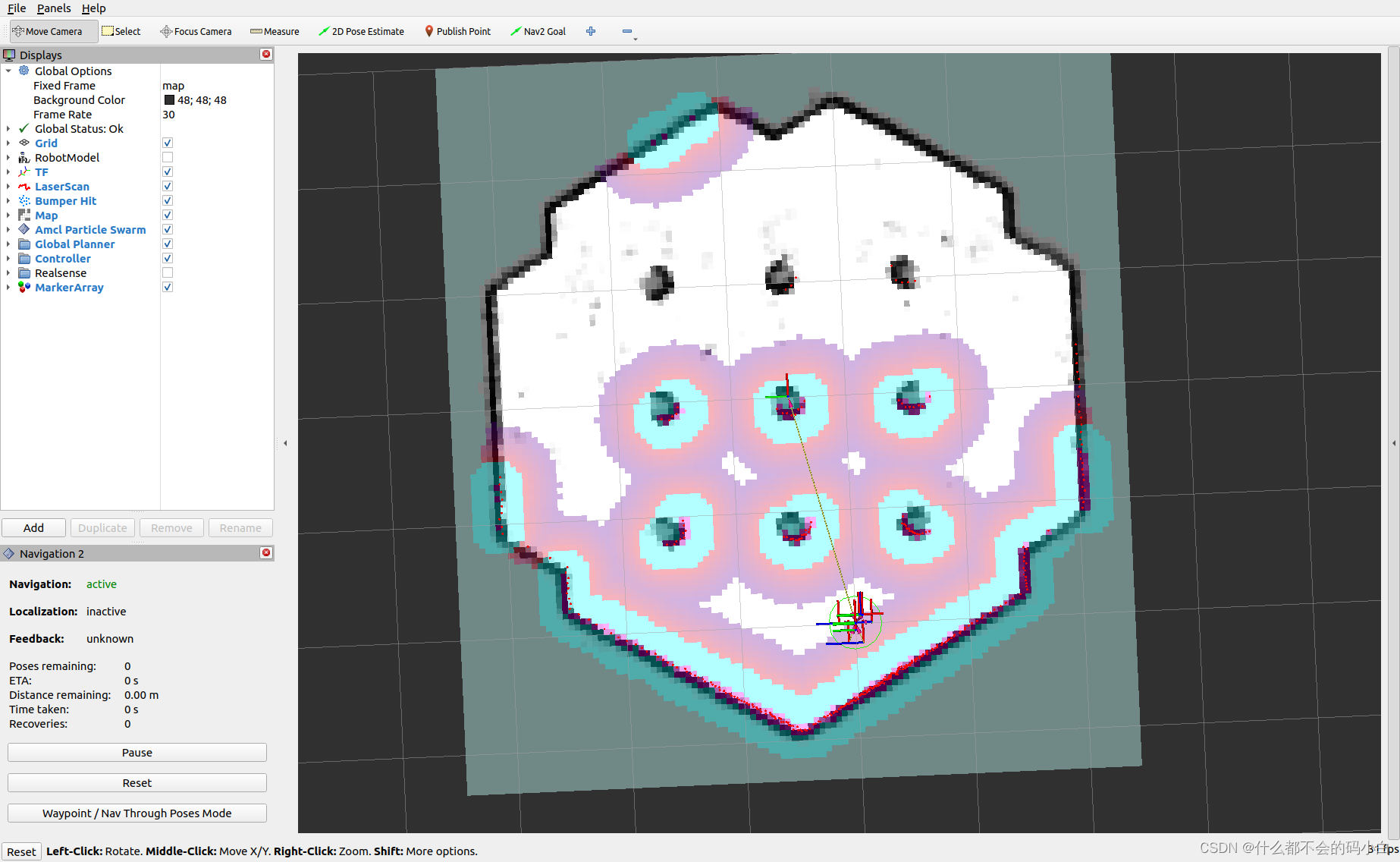
rviz2显示全局成本图。同样,如果使用 Nav2 Goal 拖动地图上的目标位置,Turtlebot3 也会向目标移动。(无需设置初始位置)
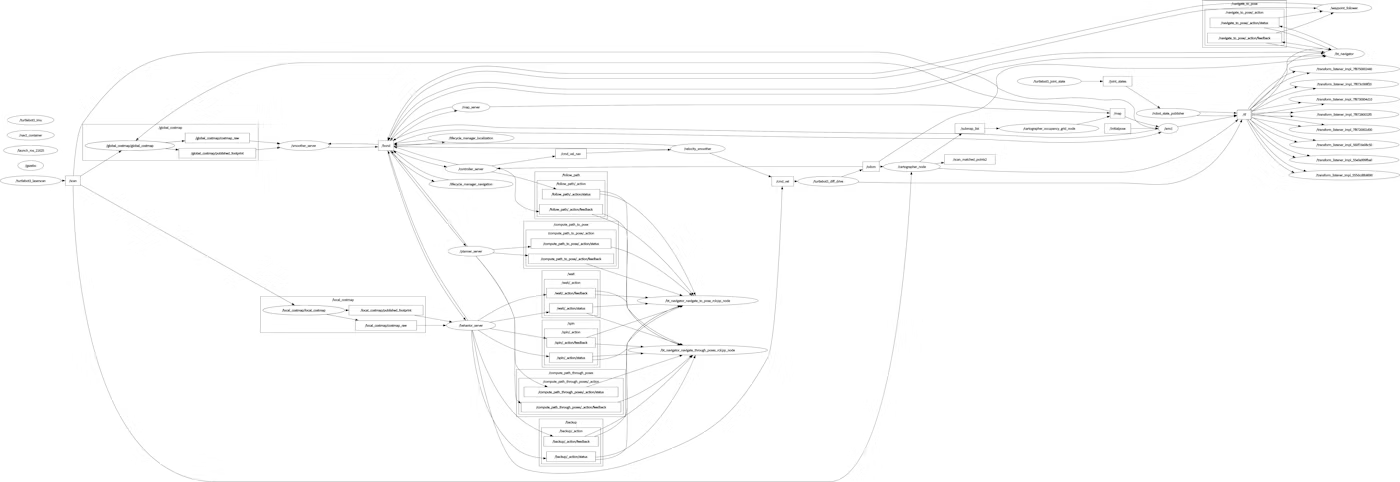
运行时的rqt_graph
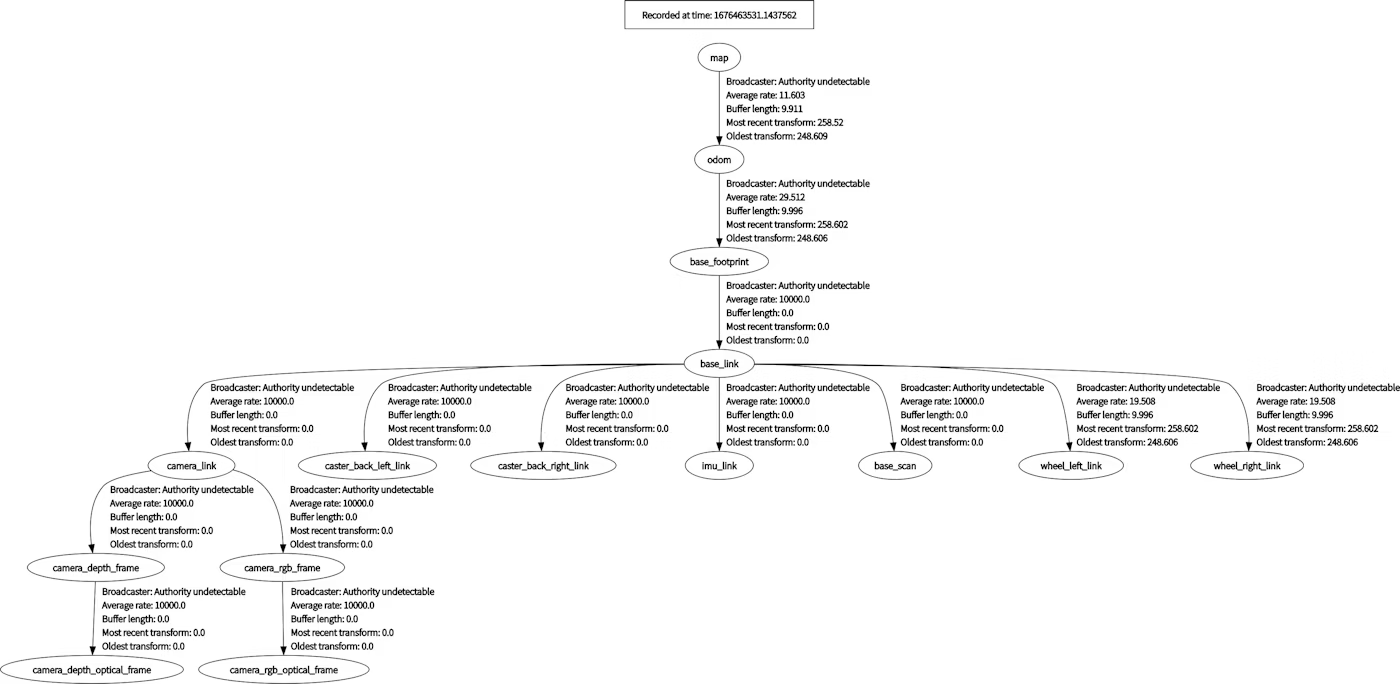
tf树
/map --> 发出 /odom 的 TF 的节点变为 cartographer_ros 而不是 amcl。
总结
本文通过结合 Nav2 和使用 cartographer 估计其自身位置,实现机器人的导航。
amcl 需要 /odom,但如果更改cartographer 设置,即使对于无法进行里程计的机器人,也可以使用 Nav2 进行导航。

