- 1QNX 7.0.0开发总结_qnx开发
- 2Android实现视频播放的3种实现方式(原生方式)_android 视频播放
- 3【深度学习】基于LSTM-CNN网络的数字识别matlab仿真_深度学习中的仿真结果图
- 4百度飞桨和文心大模型助力,中康科技重构医疗科研大数据治理
- 5背包问题详解(动态规划):01背包、完全背包、多重背包_01背包完全背包多重背包
- 6《统计自然语言处理基础》PDF_统计自然语言处理基础:国外计算机科学教材系列 pdf
- 7Spark On YARN 环境搭建_spark on yarn 7077端口
- 8人工智能对抗人工智能:利用人工智能来检测深度造假和网络钓鱼_开发出能有效识别和过滤ai深度造假内容的算法并不容易,
- 9【算法基础学习 4】互补滤波算法——PX4姿态估计_pixhawk 6c 互补滤波
- 10亚马逊对AIGC的定义
ROS2经验:ROS2 Galactic编译运行最新cartographer ROS2代码_ros2 cartographer
赞
踩
Cartographer是一个可以在多个平台提供实时的 2D 和 3D同步定位和映射 ( SLAM ) 和传感器配置的系统。
Ubuntu上原本就可以使用apt命令安装支持ros2 galactic的cartographer软件包(ros-galactic-cartographer和ros-galactic-cartographer-ros )。
但是在使用中会发现这个版本的功能比较老旧:少了一些最新代码才有的配置参数,地图消息话题发布卡顿延迟,纯定位模式无法设置只保留3张子图。。
当然最重要的是没有源码,不能根据自己的需求去优化部分代码逻辑。
所以我们直接下载源代码来编译。
本教程将描述如何编译最新cartographer代码支持ros2 galactic。
开发环境
操作系统:Ubuntu 20.04
ROS版本:ROS2 Galactic
编译和安装
- 如果已经安装了Debian包版本的cartographer,需先卸载删除。
sudo apt remove ros-galactic-cartographer ros-galactic-cartographer-ros && sudo apt autoremove
- 1
- 安装cartographer依赖库
sudo apt update sudo apt install -y \ clang \ cmake \ g++ \ git \ google-mock \ libceres-dev \ liblua5.3-dev \ libboost-all-dev \ libprotobuf-dev \ protobuf-compiler \ libeigen3-dev \ libgflags-dev \ libgoogle-glog-dev \ libcairo2-dev \ libpcl-dev \ libsuitesparse-dev \ python3-sphinx \ lsb-release \ ninja-build \ stow

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 创建cartographer_ros工作空间,并下载cartographer最新源码。
注意,ROS2的cartographer是在ROS2的github仓库中维护的版本才能用,非cartographer官方仓库。
我这里把工作空间命名为cartoros2_ws。
mkdir -p ~/cartoros2_ws/src
cd ~/cartoros2_ws/src
git clone https://github.com/ros2/cartographer.git
git clone https://github.com/ros2/cartographer_ros.git
- 1
- 2
- 3
- 4
使用脚本安装abseil-cpp库
cd ~/cartoros2_ws
src/cartographer/scripts/install_abseil.sh
- 1
- 2
4. 构建
source /opt/ros/galactic/setup.bash
cd ~/cartoros2_ws
colcon build
- 1
- 2
- 3
等待完成后就可以运行使用了
运行
运行前先确保
source /opt/ros/galactic/setup.bash
. ~/cartoros2_ws/install/local_setup.bash
- 1
- 2
可以和Cartographer ROS官网的教程一样运行bag文件(需要用ROS2的bag),只需把命令修改为:
建图:
ros2 launch cartographer_ros demo_backpack_2d.launch.py bag_filename:=<bag文件的路径>
- 1
纯定位:
ros2 launch cartographer_ros demo_backpack_2d_localization.launch.py \
load_state_filename:=<pbstream文件的路径> \
bag_filename:=<bag文件的路径>
- 1
- 2
- 3
当然我们主要还是要在自己的实际的机器人上跑cartographer。
已建图为例。
先复制一份lua参数配置文件,之后用于自己的机器人配置,我这里暂时命名为test.lua
cd ~/cartoros2_ws/src/cartographer_ros/cartographer_ros/configuration_files/
cp backpack_2d.lua test.lua
- 1
- 2
然后修改一份launch文件,我这里暂时命名为test.launch.py
cd ~/cartoros2_ws/src/cartographer_ros/cartographer_ros/launch/
cp backpack_2d.launch.py test.launch.py
- 1
- 2
以下贴出launch代码作为参考
# Author: Kal Lai from launch import LaunchDescription from launch.actions import DeclareLaunchArgument, IncludeLaunchDescription from launch.conditions import IfCondition, UnlessCondition from launch.substitutions import LaunchConfiguration from launch_ros.actions import Node, SetRemap from launch_ros.substitutions import FindPackageShare from launch.launch_description_sources import PythonLaunchDescriptionSource import os def generate_launch_description(): use_sim_time = LaunchConfiguration('use_sim_time', default='false') ## ***** Launch arguments ***** use_sim_time_arg = DeclareLaunchArgument('use_sim_time', default_value = use_sim_time) ## ***** File paths ****** pkg_share = FindPackageShare('cartographer_ros').find('cartographer_ros') cartographer_node = Node( package = 'cartographer_ros', executable = 'cartographer_node', parameters = [{'use_sim_time': use_sim_time}], arguments = [ '-configuration_directory', FindPackageShare('cartographer_ros').find('cartographer_ros') + '/configuration_files', '-configuration_basename', 'test.lua'], output = 'screen' ) cartographer_occupancy_grid_node = Node( package = 'cartographer_ros', executable = 'cartographer_occupancy_grid_node', parameters = [ {'use_sim_time': use_sim_time}, {'resolution': 0.05}], ) return LaunchDescription([ use_sim_time_arg, cartographer_node, cartographer_occupancy_grid_node, ])
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
回到工作空间后编译安装
cd ~/cartoros2_ws
colcon build
- 1
- 2
然后就能运行了
ros2 launch cartographer_ros test.launch.py
- 1
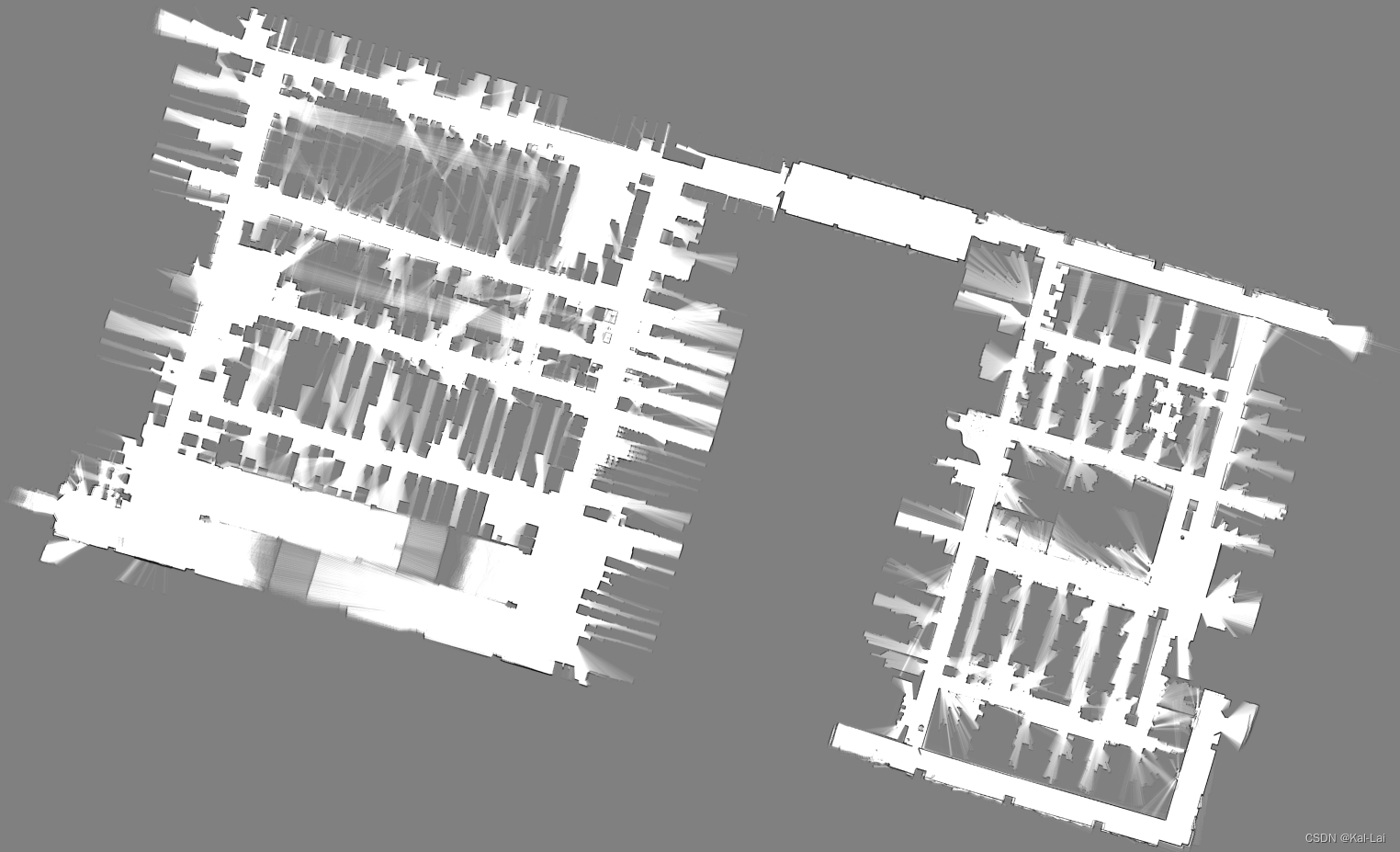
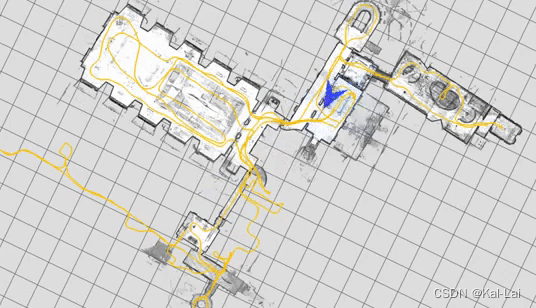
贴个在RK3399上使用cartographer建的占地面积5000平左右的地图