
- 1Manifest merger failed with multiple errors, see logs 错误解决
- 2基于javaweb网上茶叶商城系统作品成品_基于javaweb的购物网站
- 3refusing to merge unrelated histories的解决方案
- 4C++线程安全是如何保证的?线程不安全是如何出现的?有什么处理方案呢
- 5人工智能的目标分类_人工智能模型按各类型分类
- 6编译开源LibreOffice的Android版本——开源Office文档查看器_libreoffice android
- 7Java中File类中getAbsolutePath、getPath、getName、length普通方法用法示例代码
- 8【PyTorch】使用手册_pytorch手册
- 9蓝桥杯比赛总结_蓝桥杯策划
- 10PyQt5 基本语法(一):基类控件_pyqt语法
基于MATLAB的边缘检测算法实现
赞
踩
MATLAB边缘检测
一、目的:
熟悉边缘检测原理,并运用matlab软件实现图像的canny边缘检测,体会canny边缘检测的优缺点。
二、内容:
编写matlab程序,实现对lena图像的边缘检测,输出程序运行结果。
三、原理或步骤:
首先回顾一下边缘检测的一般步骤:
边缘检测算法一般包含如下四个步骤:
1.滤波(去噪)。
2.增强(一般是通过计算梯度幅值)。
3.检测(在图像中有许多点的梯度幅值会比较大,而这些点并不都是边缘,所以应该用某种方法来确定边缘点,比如最简单的边缘检测判据:梯度幅值阈值)。
4.定位(有的应用场合要求确定边缘位置,可以在子像素水平上来估计,指出边缘的位置和方向)
Canny边缘检测的算法步骤:
1.用高斯滤波器平滑图像(不同尺度的Canny检测子由高斯的不同标准差来表示)用一阶偏导的有限差分来计算梯度的幅值和方向。
2.对高斯平滑后的图像进行sobel边缘检测。这里需要求横的竖的还有联合的,所以一共三个需要sobel边缘检测图像。
3.对联合的sobel检测图像进行非极大值抑制(Non-Maxima Suppression, NMS)
4.用双阈值算法检测和连接边缘,并进行滞后阈值处理。
其中非极大值抑制细化了幅值图像中的屋脊带,只保留幅值局部变化最大的点。
双阈值算法:用两个阈值得到两个阈值图像,然后把高阈值的图像中的边缘连接成轮廓,连接时到达轮廓的端点时,在低阈值图像上找可以连接的边缘。不断收集,直到所有的间隙连接起来为止。
四、运行结果和分析
每步运行效果:
Figure1原图:

Figure2 高斯模糊后:

Figure3 sobel边缘检测后:

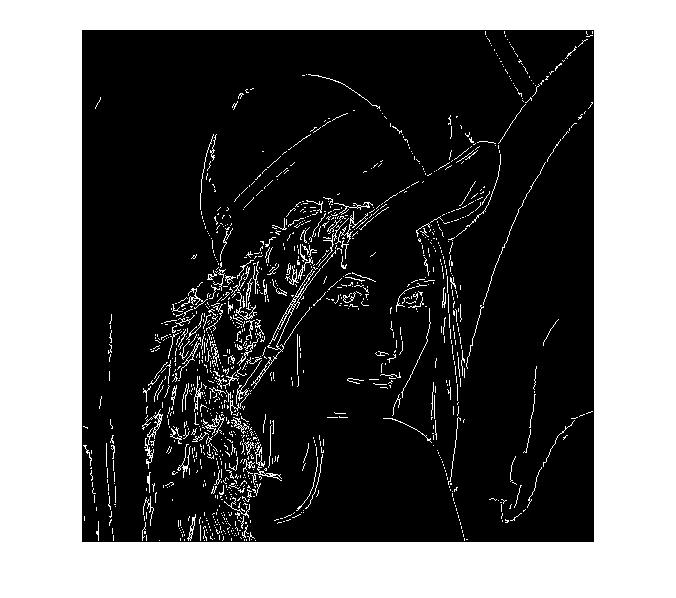
Figure4 非极大抑制后:
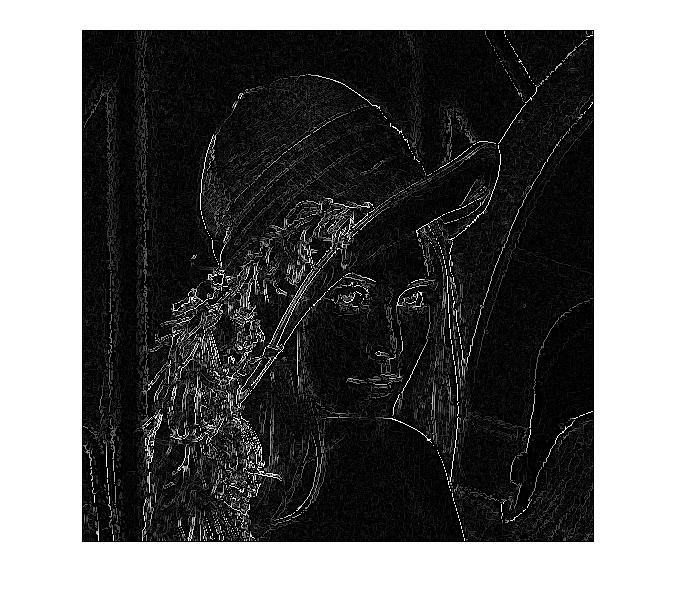
Figure5 上阈值120,下阈值100检测结果:
Canny算子的方向性使得它的边缘检测和定位优于其他算子,具有更好的边缘强度估计,能产生梯度方向和强度两个信息。
五、算法程序
Main.m


