
热门标签
热门文章
- 1Android Studio导入安卓源码_android studio 导入yy3568-android11源码
- 2监控系统日志采集 - Filebeat_filebeat采集日志
- 3github.io创建个人网站_github io
- 4RocketMQ如何解决消息积压问题?_rocketmq消息积压
- 5BEV高频面试问题汇总!(纯视觉&多模态融合算法)
- 6【Unity】基于Obi的绳/杆渲染及ObiRopeExtrudedRenderer、ObiRopeLineRenderer、ObiRopeChainRenderer、ObiRopeMeshRende_unity obi
- 7kafka-消费者-注解接收消息(SpringBoot整合Kafka)_kafka消费者注解
- 8睿尔曼超轻量仿人机械臂ROS系列-ROS第二篇 使用Moveit控制Gazebo中的机械臂_睿尔曼 ros百度云下载
- 9RabbitMQ源码案例分析与性能调优_rabbitmq源码解析
- 10无法启动此程序,因为计算机中丢失vcruntime140.dll”错误的解决办法_无法启动程序,因为计算机丢失vcruntime140.dll
当前位置: article > 正文
Autoware pure_pursuit节点适配差速底盘_autoware 差速底盘控制
作者:我家小花儿 | 2024-06-13 02:30:56
赞
踩
autoware 差速底盘控制
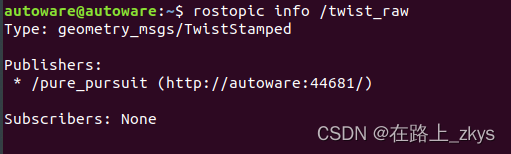
Autoware pure_pursuit节点输出的话题是 "/twist_raw", 需要转换为我们小车底盘控制速度的话题,我这里直接用"/cmd_vel"。主要任务是消息格式的转换,下面详细介绍。
使用 rostopic info 指令查看话题 /twist_raw的消息格式,查看结果为 geometry_msgs/TwistStamped 显然于我们常用的"/cmd_vel" 的消息格式不一样,cmd_vel的消息格式为geometry_msgs/Twist
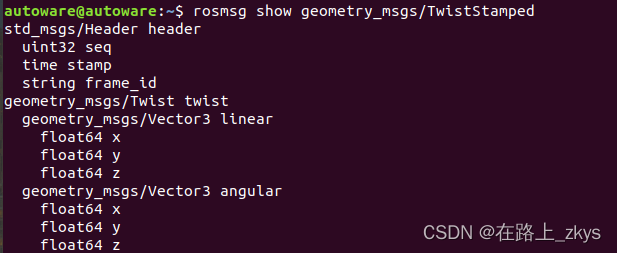
使用 rosmsg show查看geometry_msgs/TwistStamped 消息的具体格式,显示如下:
创建一个功能包转换消息格式,具体如下:
- # 创建功能包
-
- mkdir -p catkin_ws/src
- cd catkin_ws/src
- catkin_creat_pkg vel_transform roscpp geometry_msgs std_msgs
-
- // 消息格式转换的源码
-
- #include <ros/ros.h>
- #include <std_msgs/Float32.h>
- #include <geometry_msgs/TwistStamped.h>
- #include <geometry_msgs/Twist.h>
-
- ros::Publisher twist_pub_;
- ros::Subscriber twist_sub_;
-
- void twistCmdCallback(const geometry_msgs::TwistStampedConstPtr& msg)
- {
- geometry_msgs::Twist twist = msg->twist;
- twist_pub_.publish(twist);
-
- ROS_INFO("Transform Success !");
- }
-
- int main(int argc, char **argv)
- {
- ros::init(argc, argv, "twist_transform");
- ros::NodeHandle nh;
- twist_pub_ = nh.advertise<geometry_msgs::Twist>("cmd_vel", 1);
- twist_sub_ = nh.subscribe<geometry_msgs::TwistStamped>("twist_raw", 1, twistCmdCallback);
-
- ros::spin();
- return 0;
- }

在cmakelists.txt文件中配置下功能包即可
- # 这里我的消息转换源码的文件名为twist_transform.cpp
-
- add_executable(twist_transform src/twist_transform.cpp)
-
- target_link_libraries(twist_transform
- ${catkin_LIBRARIES}
- )
经测试,pure pursuit在差速底盘上的运行还算可以。
声明:本文内容由网友自发贡献,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:【wpsshop博客】
推荐阅读
相关标签

