
热门标签
热门文章
- 1android 应用内部获取本应用或者对应包名的应用的SHA1签名的办法_android 通过包名生成sha-1
- 2Python机器视觉--OpenCV进阶(核心)--图像直方图与掩膜直方图与直方图均衡化_python opencv 图片融合直方图变换
- 3oracle 禁止dblink,oracle 触发器实现禁止在数据库中创建dblink ---通过触发器实现...
- 47个用于锁定Docker和Kubernetes的容器安全工具
- 5STM32学习笔记-RTC实时时钟-12_stm32使用标准c的time.h
- 6软件测试需求分析是什么?为什么需要进行测试需求分析?_软件需求分析的作用 开发测试
- 7Xilinx官方文档系列(二)Vivado Design Suite 用户指南:设计流程概述_xilinx管饭文档
- 8Sentinel系列之特性、组成、部署讲解_alibaba sentinel集群部署
- 9分布式缓存之redis介绍、安装、主从、集群实例_分布式有几个redis实例
- 10mongoDB 删除数据、删除所有数据、更新数据、查询等常用操作_mongo批量删除sql查询出来的数据
当前位置: article > 正文
轨迹跟踪与控制篇——Pure Pursuit纯跟踪算法_追踪控制
作者:不正经 | 2024-06-13 02:19:37
赞
踩
追踪控制
介绍
纯跟踪控制算法(Pure Pursuit)是一种典型的横向控制方法,最早由R.Wallace在1985年提出,该方法对参考轨迹的鲁棒性较好。
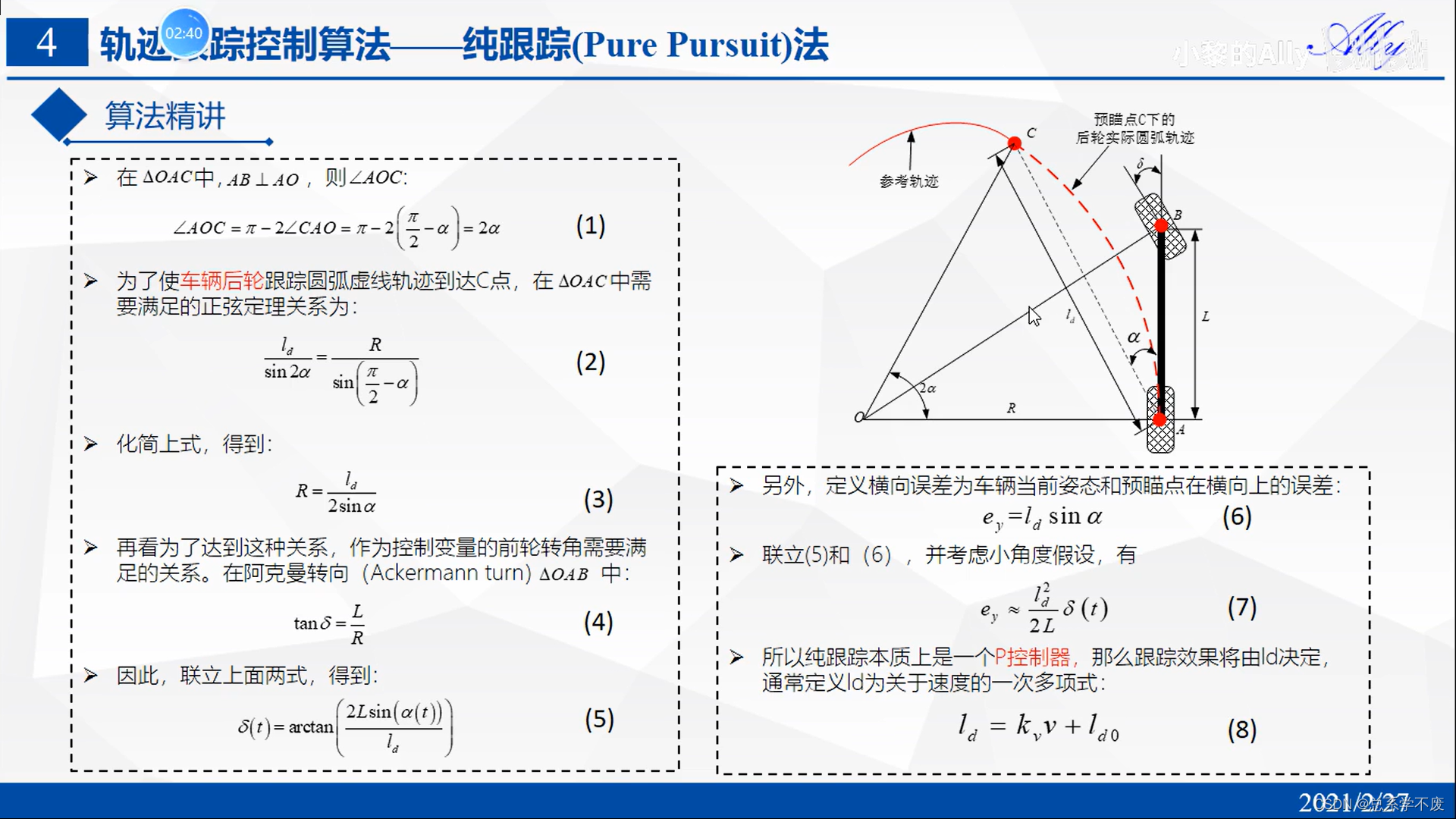
该算法的思想:基于当前车辆后轮中心位置,在参考路径上向 与 自车后轴中心距离ld(自定义)的位置处 匹配一个预瞄点,假设车辆后轮中心点可以按照一定的转弯半径R行驶抵达该预瞄点,然后根据预瞄距离ld,转弯半径R,车辆坐标系下预瞄点的朝向角2α之间的几何关系来确定前轮转角。
原理
参考资料
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/不正经/article/detail/710527
推荐阅读
相关标签

