
热门标签
热门文章
- 1一加12/11/10/Ace2/Ace3手机上锁回锁BL无限重启黑屏9008模式救砖_一加回锁
- 2一文揭秘揭秘AI绘画发展历程及必学AI工具Midjourney介绍_mj什么时候火的ai绘画
- 32016校园招聘总结_兆易创新笔试要开摄像头吗
- 4使用STM32单片机实现无源蜂鸣器播放音乐的设计_stm32cubemx蜂鸣器播放音乐
- 5Quartus+Modelsim实现计数器_modelsim28进制计算器
- 6今日AI提示词|新媒体运营场景-小红薯笔记通用指令
- 7完美解决conda命令出现CondaHTTPError: HTTP 000 CONNECTION FAILED for url报错的终极方法_conda 连不上
- 8电脑必备软件-Autodesk AutoCAD 2024软件安装_autocad2024安装
- 92024年Android最全使用 promise 重构 Android 异步代码_android 原生promise(1),Android开发社招面试总结_安卓promise
- 10使用 Spring Boot 进行分页简单示例_springboot分页接口文档案例
当前位置: article > 正文
工程(十六)——自己数据集跑Fast_livo_fast-livo
作者:小舞很执着 | 2024-06-22 11:14:51
赞
踩
fast-livo

一、基础环境
Ubuntu20.04
ROS noetic
PCL 1.8
Eigen 3.3.4
Sophus
- git clone https://github.com/strasdat/Sophus.git
- cd Sophus
- git checkout a621ff
- mkdir build && cd build && cmake ..
- make
- sudo make install
下面两个直接把包下载下来一起编译就可以
livox_ros_driver
Vikit
二、编译
- git clone https://github.com/uzh-rpg/rpg_vikit.git fast_liv/src
- git clone https://github.com/hku-mars/FAST-LIVO fast_liv/src
- git clone https://github.com/Livox-SDK/livox_ros_driver.git fastlio2/src
- cd fastlio2
- catkin_make
- source ~/catkin_ws/devel/setup.bash
三、运行
下载数据包
- roslaunch fast_livo mapping_avia.launch
- rosbag play YOUR_DOWNLOADED.bag
四、跑自己数据集
关于固态激光雷达和相机的数据集如何建立见之前跑r3live的博客
工程(十三)——从零用自己数据跑R3LIVE_r3live跑自己的数据-CSDN博客
下面只讲改哪些部分
1.config文件
Fast_liv/src/FAST-LIVO/config 需要改一个avia_resize.yaml和camera_pinhole_resize.yaml
- avia_resize.yaml:主要修改相机的topic 内参和外参



- camera_pinhole_resize.yaml:

- launch文件
选择自己的yaml文件和topic名称
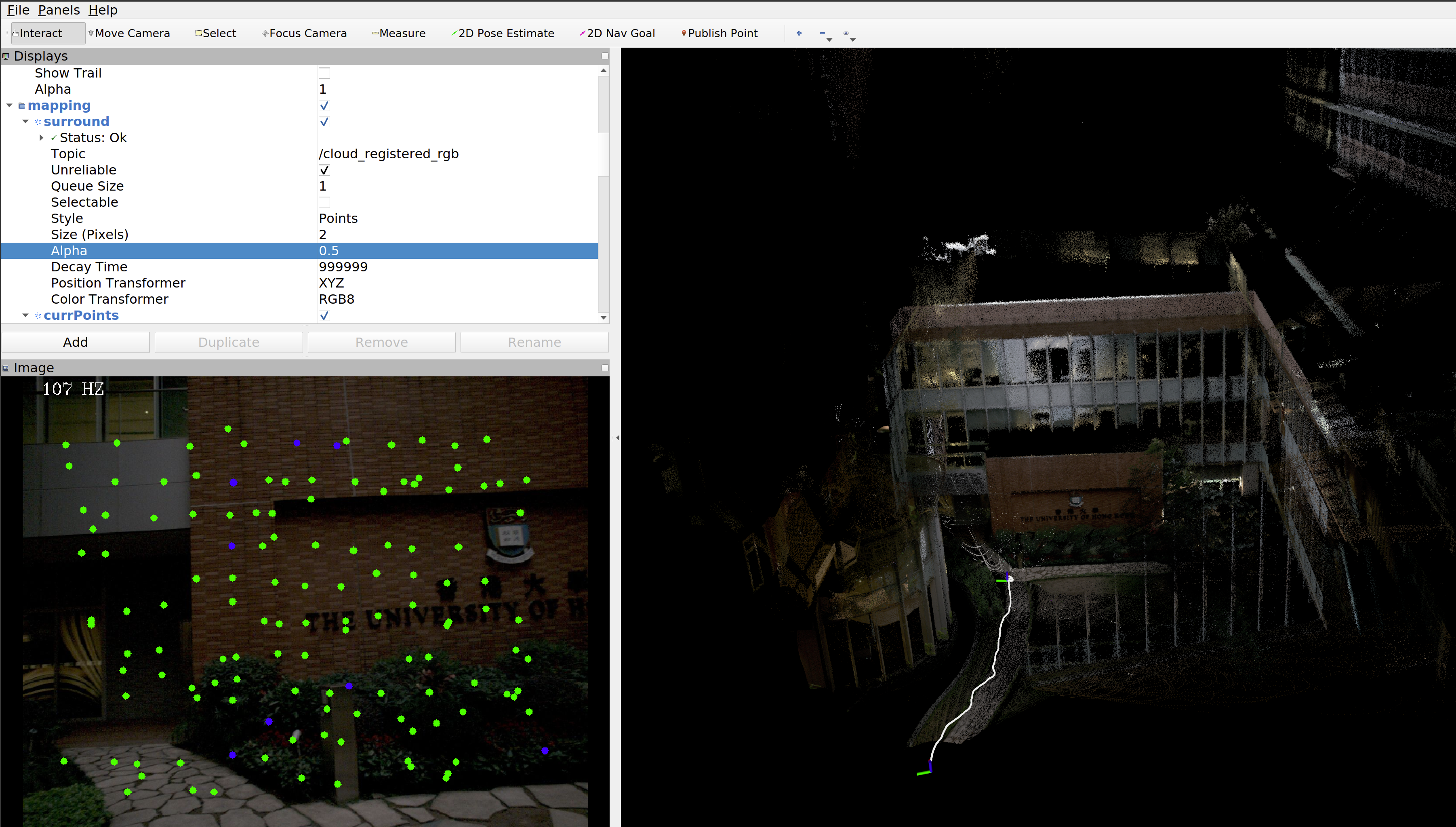
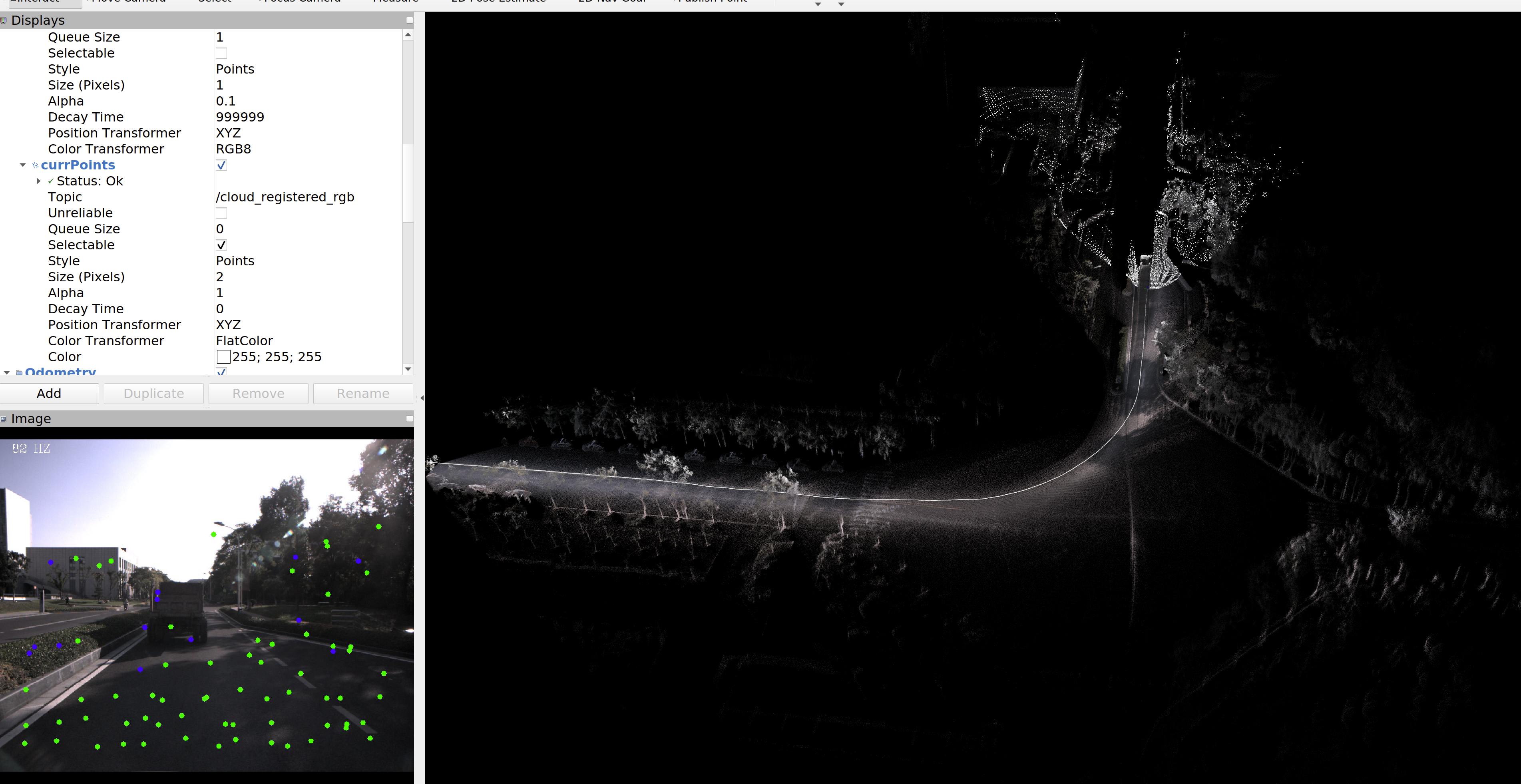
 之后就可以运行了
之后就可以运行了
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/小舞很执着/article/detail/746359
推荐阅读
相关标签

