
热门标签
热门文章
- 1学习笔记--算法(双指针)2
- 2Linux下TPC-H的使用(CentOS+PostgreSQL)_tpc-h下载
- 3最新扣子(Coze)实战教程:如何创建扣子插件,完全免费,快来学习吧~_扣子coze
- 47步搞懂手写数字识别Mnist
- 52024年第五届“华数杯”全国大学生数学建模竞赛 A题详细思路+详细matlab代码_华数杯2024
- 6alist基本用法@文档阅读@挂载网盘@网盘webdav挂载_alist文档
- 7输电线路杆塔倾斜在线监测系统_输电塔监测系统
- 8GPT-5即将登场:AI赋能未来的新机遇与挑战
- 9第一个AI应用(文心智能体平台)_文心智能平台ai
- 10Java数据结构——二叉搜索树_根节点的值
当前位置: article > 正文
【C 数据结构-图】3. 深度优先搜索、广度优先搜索_深度优先搜索 广度优先搜索
作者:寸_铁 | 2024-08-05 15:46:24
赞
踩
深度优先搜索 广度优先搜索
文章目录
- 对存储的图中的顶点进行遍历搜索,常用的遍历方式有两种:深度优先搜索和广度优先搜索。
【 1. DFS 深度优先搜索 】
1.1 基本原理
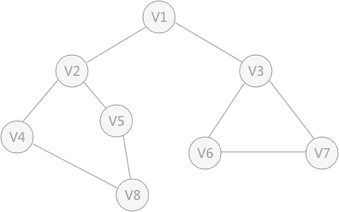
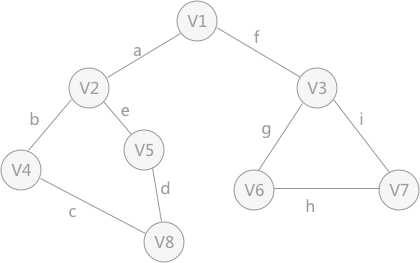
- 深度优先搜索的过程 类似于树的先序遍历,首先从例子中体会深度优先搜索。例如下图是一个无向图,采用深度优先算法遍历这个图的过程为:
- 首先任意找一个未被遍历过的顶点,例如从 V1 开始,由于 V1 率先访问过了,所以,需要标记 V1 的状态为访问过;
- 然后遍历 V1 的邻接点,例如访问 V2 ,并做标记,然后访问 V2 的邻接点,例如 V4 (做标记),然后 V8 ,然后 V5 ;
- 当继续遍历 V5 的邻接点时,根据之前做的标记显示,所有V5 的邻接点都被访问过了。此时,从 V5 回退到 V8 ,看 V8 是否有未被访问过的邻接点,如果没有,继续回退到 V4 , V2 ,V1 ;
- 通过查看 V1 ,找到一个未被访问过的顶点 V3 ,继续遍历,然后访问 V3 邻接点 V6 ,然后 V7 ;
- 由于 V7 没有未被访问的邻接点,所以回退到 V6 ,继续回退至 V3 ,最后到达 V1 ,发现没有未被访问的;
- 最后一步需要判断是否所有顶点都被访问,如果还有没被访问的,以未被访问的顶点为第一个顶点,继续依照上边的方式进行遍历。
- 根据上边的过程,可以得到下图通过深度优先搜索获得的顶点的遍历次序为:
V1、V2、V4、V8、 V5、V3、V6、V7
- 总结:深度优先搜索,是从图中的一个顶点出发,每次遍历当前访问顶点的临接点,一直到访问的顶点没有未被访问过的临接点为止。然后采用依次回退的方式(深度优先搜索是一个不断回溯的过程),查看来的路上每一个顶点是否有其它未被访问的临接点。访问完成后,判断图中的顶点是否已经全部遍历完成,如果没有,以未访问的顶点为起始点,重复上述过程。
1.2 C 实现
- 深度优先搜索算法遍历图的实现代码为:
#define _CRT_SECURE_NO_WARNINGS 1 #include <stdio.h> #define MAX_VERtEX_NUM 20 //顶点的最大个数 #define VertexType int //顶点的数据类型 #define VRType int //顶点之间的关系的变量类型 #define InfoType char //存储弧或边额外信息的指针变量类型 bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过 //边的信息结构体 typedef struct { VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。 InfoType* info; //弧或边额外含有的信息指针 }ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM]; //图结构体 typedef struct { VertexType vexs[MAX_VERtEX_NUM]; //一维数据数组 AdjMatrix arcs; //二维关系数组,即邻接矩阵 int vexnum, arcnum; //图的顶点数和弧(边)数 }MGraph; //根据顶点本身数据,判断出顶点在二维数组中的位置 int LocateVex(MGraph* G, VertexType v) { int i = 0; //遍历一维数组,找到变量v for (; i < G->vexnum; i++) { if (G->vexs[i] == v) { break; } } //如果找不到,输出提示语句,返回-1 if (i > G->vexnum) { printf("no such vertex.\n"); return -1; } return i; } //构造无向图 void CreateDN(MGraph* G) { scanf("%d,%d", &(G->vexnum), &(G->arcnum)); for (int i = 0; i < G->vexnum; i++) { scanf("%d", &(G->vexs[i])); } for (int i = 0; i < G->vexnum; i++) { for (int j = 0; j < G->vexnum; j++) { G->arcs[i][j].adj = 0; G->arcs[i][j].info = NULL; } } for (int i = 0; i < G->arcnum; i++) { int v1, v2; scanf("%d,%d", &v1, &v2); int n = LocateVex(G, v1); int m = LocateVex(G, v2); if (m == -1 || n == -1) { printf("no this vertex\n"); return; } G->arcs[n][m].adj = 1; G->arcs[m][n].adj = 1;//无向图的二阶矩阵沿主对角线对称 } } //返回第一个与顶点v有边的顶点的下标 int FirstAdjVex(MGraph G, int v) { //查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标 for (int i = 0; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } //返回从第w+1个位置开始,与顶点v有边的顶点的下标 int NextAdjVex(MGraph G, int v, int w) { //从前一个访问位置w的下一个位置开始,查找之间有边的顶点 for (int i = w + 1; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } //打印输出顶点v的值 void visitVex(MGraph G, int v) { printf("%d ", G.vexs[v]); } //深度优先搜索核心函数 void DFS(MGraph G, int v) { visited[v] = true;//标记为true,表示这个顶点已被处理 visitVex(G, v); //输出第v个顶点 //从该顶点的第一个边开始,一直到最后一个边,对处于边另一端的顶点调用DFS函数 for (int w = FirstAdjVex(G, v); w >= 0; w = NextAdjVex(G, v, w)) { //如果该顶点的标记位false,证明未被访问,调用深度优先搜索函数 if (!visited[w]){ DFS(G, w); } } } //对图进行深度优先搜索 void DFSTraverse(MGraph G) { int v; //初始化为visit标记数组false for (v = 0; v < G.vexnum; ++v) { visited[v] = false; } //对于每个标记为false的顶点调用深度优先搜索函数 for (v = 0; v < G.vexnum; v++) { //如果该顶点的标记位为false,则调用深度优先搜索函数 if (!visited[v]) { DFS(G, v); } } } int main() { MGraph G; //建立一个图的对象 CreateDN(&G); //初始化图 DFSTraverse(G); //深度优先搜索图 return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
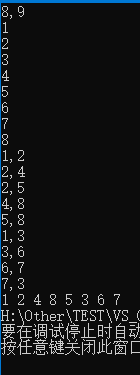
- 使用上述程序存储下图的无向图时,输入如下数据,得到DFS的输出结果:
//输入如下数据: 8,9 1 2 3 4 5 6 7 8 1,2 2,4 2,5 4,8 5,8 1,3 3,6 6,7 7,3
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
【 2. BFS 广度优先搜索 】
2.1 基本原理
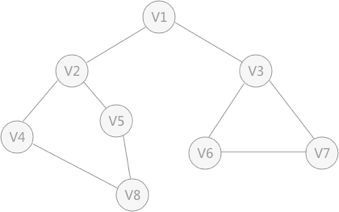
- 广度优先搜索 类似于树的层次遍历。以下图的无向图为例,假设 V1 作为起始点,遍历其所有的邻接点 V2 和 V3 ,以 V2 为起始点,访问邻接点 V4 和 V5 ,以 V3 为起始点,访问邻接点 V6 、 V7 ,以 V4 为起始点访问 V8 ,以 V5 为起始点,由于 V5 所有的起始点已经全部被访问,所有直接略过, V6 和 V7 也是如此。
以 V1 为起始点的遍历过程结束后,判断图中是否还有未被访问的点,由于图 1 中没有了,所以整个图遍历结束。遍历顶点的顺序为:
V1、 V2、 v3、V4、 V5、 V6、 V7、 V8
- 总结:广度优先搜索,是从图中的某一顶点出发,遍历每一个顶点时,依次遍历其所有的邻接点,然后再从这些邻接点出发,同样依次访问它们的邻接点。按照此过程,直到图中所有被访问过的顶点的邻接点都被访问到。最后还需要做的操作就是查看图中是否存在尚未被访问的顶点,若有,则以该顶点为起始点,重复上述遍历的过程。
2.2 C 实现
- 广度优先搜索的实现需要借助 队列 这一特殊数据结构,实现代码为:
#define _CRT_SECURE_NO_WARNINGS 1 #include <stdio.h> #include <stdlib.h> #define MAX_VERtEX_NUM 20 //顶点的最大个数 #define VertexType int //顶点的数据类型 #define VRType int //顶点之间的关系的变量类型 #define InfoType char //存储弧或边额外信息的指针变量类型 bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过 //队列 typedef struct Queue { VertexType data; struct Queue* next; }Queue; //边的信息结构体 typedef struct { VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。 InfoType* info; //弧或边额外含有的信息指针 }ArcCell, AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM]; //图结构体 typedef struct { VertexType vexs[MAX_VERtEX_NUM]; //一维数据数组 AdjMatrix arcs; //二维关系数组,即邻接矩阵 int vexnum, arcnum; //图的顶点数和弧(边)数 }MGraph; //根据顶点本身数据,判断出顶点在二维数组中的位置 int LocateVex(MGraph* G, VertexType v) { int i = 0; //遍历一维数组,找到变量v for (; i < G->vexnum; i++) { if (G->vexs[i] == v) { break; } } //如果找不到,输出提示语句,返回-1 if (i > G->vexnum) { printf("no such vertex.\n"); return -1; } return i; } //构造无向图 void CreateDN(MGraph* G) { scanf("%d,%d", &(G->vexnum), &(G->arcnum)); for (int i = 0; i < G->vexnum; i++) { scanf("%d", &(G->vexs[i])); } for (int i = 0; i < G->vexnum; i++) { for (int j = 0; j < G->vexnum; j++) { G->arcs[i][j].adj = 0; G->arcs[i][j].info = NULL; } } for (int i = 0; i < G->arcnum; i++) { int v1, v2; scanf("%d,%d", &v1, &v2); int n = LocateVex(G, v1); int m = LocateVex(G, v2); if (m == -1 || n == -1) { printf("no this vertex\n"); return; } G->arcs[n][m].adj = 1; G->arcs[m][n].adj = 1;//无向图的二阶矩阵沿主对角线对称 } } //返回第一个与顶点v有边的顶点的下标 int FirstAdjVex(MGraph G, int v) { //查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标 for (int i = 0; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } //返回从第w+1个位置开始,与顶点v有边的顶点的下标 int NextAdjVex(MGraph G, int v, int w) { //从前一个访问位置w的下一个位置开始,查找之间有边的顶点 for (int i = w + 1; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } //打印输出顶点v的值 void visitVex(MGraph G, int v) { printf("%d ", G.vexs[v]); } //初始化队列 void InitQueue(Queue** Q) { (*Q) = (Queue*)malloc(sizeof(Queue)); (*Q)->next = NULL; } //顶点元素v进队列 void EnQueue(Queue** Q, VertexType v) { Queue* element = (Queue*)malloc(sizeof(Queue)); element->data = v; element->next = NULL; Queue* temp = (*Q); while (temp->next != NULL){ temp = temp->next; } temp->next = element; } //队头元素出队列,队列新的队头元素值赋给u void DeQueue(Queue** Q, int* u) { (*u) = (*Q)->next->data; (*Q)->next = (*Q)->next->next; } //判断队列是否为空 bool QueueEmpty(Queue* Q) { if (Q->next == NULL) { return true; } return false; } //广度优先搜索 void BFSTraverse(MGraph G) { int v; //将用做标记的visit数组初始化为false for (v = 0; v < G.vexnum; ++v) { visited[v] = false; } //对于每个标记为false的顶点调用深度优先搜索函数 Queue* Q; //创建1个队列指针Q InitQueue(&Q); for (v = 0; v < G.vexnum; v++) { // [对每个顶点v循环] if (!visited[v]) { visited[v] = true; //标记为true,表示这个顶点已被处理 visitVex(G,v); //输出第v个顶点 EnQueue(&Q, G.vexs[v]); //将第v个顶点入队 while (!QueueEmpty(Q)) { // [判断队列是否为空] int u; DeQueue(&Q, &u); //出队,并将新的队头的值赋值给u u = LocateVex(&G, u); //新的队头的值对应的下标 for (int w = FirstAdjVex(G,u); w >= 0; w = NextAdjVex(G, u, w)) { //将队头u的所有临接点遍历,并入队 if (!visited[w]) { visited[w] = true; visitVex(G, w); EnQueue(&Q, G.vexs[w]); } } } } } } int main() { MGraph G; //建立一个图的对象 CreateDN(&G); //初始化图 BFSTraverse(G);//广度优先搜索图 return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 使用上述程序存储下图的无向图时,输入如下数据,得到DFS的输出结果:
//输入数据如下: 8,9 1 2 3 4 5 6 7 8 1,2 2,4 2,5 4,8 5,8 1,3 3,6 6,7 7,3
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
【 3. 深度优先生成树、广度优先生成树 】
- 无向图遍历过程中所经历过的图中的顶点和边的组合,就是图的生成树或者生成森林。
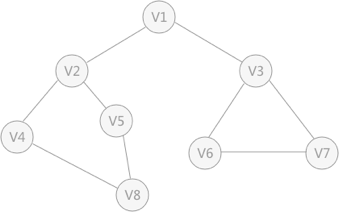
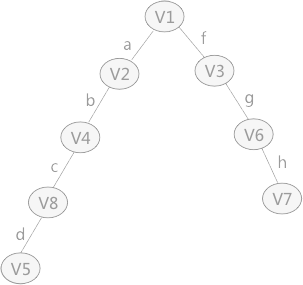
- 由深度优先搜索得到的树为 深度优先生成树。例如,当对上图的无向图使用深度优先搜索算法时,假设 V1 作为遍历的起始点,涉及到的顶点和边的遍历顺序为(不唯一):
V1、V2、V4、V8、V5、V3、V6、V7。
此种遍历顺序构建的生成树为:
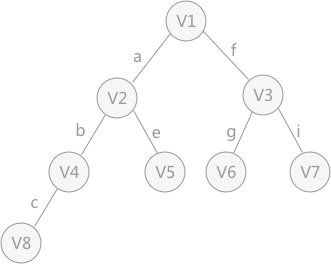
- 同理,广度优先搜索生成的树为 广度优先生成树,对该无向图以顶点 V1 为起始点进行广度优先搜索遍历得到的树,如下图所示:
【 4. 深度优先生成森林、广度优先生成森林 】
- 前言回顾:详情见:【C 数据结构】图。
① 非连通图在进行遍历时,实则是对非连通图中每个连通分量分别进行遍历,在遍历过程经过的每个顶点和边,就构成了每个连通分量的生成树;
② 非连通图的多个连通分量构成的多个生成树为非连通图的生成森林。
4.1 深度优先生成森林
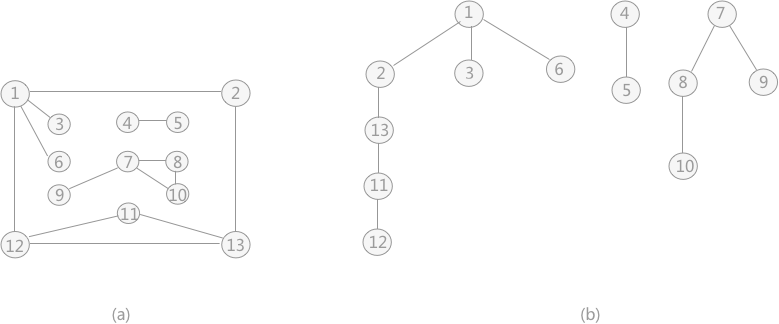
- 对下图 a 的非连通图采用深度优先搜索算法遍历时,得到的深度优先生成森林(由 3 个深度优先生成树构成)如下图 b 所示(不唯一)。
- C 实现:
#define _CRT_SECURE_NO_WARNINGS 1 #include <stdio.h> #include <stdlib.h> #define MAX_VERtEX_NUM 20 //顶点的最大个数 #define VertexType int //顶点的数据类型 #define VRType int //顶点之间的关系的变量类型 bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过 //边的信息结构体 typedef struct { VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。 }ArcCell, AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM]; //图结构体 typedef struct { VertexType vexs[MAX_VERtEX_NUM]; //一维数据数组 AdjMatrix arcs; //二维关系数组,即邻接矩阵 int vexnum, arcnum; //图的顶点数和弧(边)数 }MGraph; //孩子兄弟表示法的链表结点结构 typedef struct CSNode { VertexType data; struct CSNode* lchild;//孩子结点 struct CSNode* nextsibling;//兄弟结点 }*CSTree, CSNode; //根据顶点本身数据,判断出顶点在二维数组中的位置 int LocateVex(MGraph G, VertexType v) { int i = 0; //遍历一维数组,找到变量v for (; i < G.vexnum; i++) { if (G.vexs[i] == v) { break; } } //如果找不到,输出提示语句,返回-1 if (i > G.vexnum) { printf("no such vertex.\n"); return -1; } return i; } //构造无向图 void CreateDN(MGraph* G) { scanf("%d,%d", &(G->vexnum), &(G->arcnum)); getchar(); for (int i = 0; i < G->vexnum; i++) { scanf("%d", &(G->vexs[i])); } for (int i = 0; i < G->vexnum; i++) { for (int j = 0; j < G->vexnum; j++) { G->arcs[i][j].adj = 0; } } for (int i = 0; i < G->arcnum; i++) { int v1, v2; scanf("%d,%d", &v1, &v2); int n = LocateVex(*G, v1); int m = LocateVex(*G, v2); if (m == -1 || n == -1) { printf("no this vertex\n"); return; } G->arcs[n][m].adj = 1; G->arcs[m][n].adj = 1;//无向图的二阶矩阵沿主对角线对称 } } //返回第一个与顶点v有边的顶点的下标 int FirstAdjVex(MGraph G, int v) { //查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标 for (int i = 0; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } //返回从第w+1个位置开始,与顶点v有边的顶点的下标 int NextAdjVex(MGraph G, int v, int w) { //从前一个访问位置w的下一个位置开始,查找之间有边的顶点 for (int i = w + 1; i < G.vexnum; i++) { if (G.arcs[v][i].adj) { return i; } } return -1; } void DFSTree(MGraph G, int v, CSTree* T) { //将正在访问的该顶点的标志位设为true visited[v] = true; bool first = true; CSTree q = NULL; //依次遍历该顶点的所有邻接点 for (int w = FirstAdjVex(G, v); w >= 0; w = NextAdjVex(G, v, w)) { //如果该临界点标志位为false,说明还未访问 if (!visited[w]) { //为该邻接点初始化为结点 CSTree p = (CSTree)malloc(sizeof(CSNode)); p->data = G.vexs[w]; p->lchild = NULL; p->nextsibling = NULL; //该结点的第一个邻接点作为孩子结点,其它邻接点作为孩子结点的兄弟结点 if (first) { (*T)->lchild = p; first = false; } //否则,为兄弟结点 else { q->nextsibling = p; } q = p; //以当前访问的顶点为树根,继续访问其邻接点 DFSTree(G, w, &q); } } } //深度优先搜索生成森林并转化为二叉树 void DFSForest(MGraph G, CSTree* T) { (*T) = NULL; //每个顶点的标记为初始化为false for (int v = 0; v < G.vexnum; v++) { visited[v] = false; } CSTree q = NULL; //遍历每个顶点作为初始点,建立深度优先生成树 for (int v = 0; v < G.vexnum; v++) { //如果该顶点的标记位为false,证明未访问过 if (!(visited[v])) { //新建一个结点,表示该顶点 CSTree p = (CSTree)malloc(sizeof(CSNode)); p->data = G.vexs[v]; p->lchild = NULL; p->nextsibling = NULL; //如果树未空,则该顶点作为树的树根 if (!(*T)) { (*T) = p; } //该顶点作为树根的兄弟结点 else { q->nextsibling = p; } //每次都要把q指针指向新的结点,为下次添加结点做铺垫 q = p; //以该结点为起始点,构建深度优先生成树 DFSTree(G, v, &p); } } } //前序遍历二叉树 void PreOrderTraverse(CSTree T) { if (T) { printf("%d ", T->data); PreOrderTraverse(T->lchild); PreOrderTraverse(T->nextsibling); } return; } int main() { MGraph G; //建立一个图的对象 CreateDN(&G);//初始化图 CSTree T; DFSForest(G, &T); PreOrderTraverse(T); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 使用上述程序存储下图的无向图,输入如下数据,构建深度优先生成森林,得到DFS的输出结果:

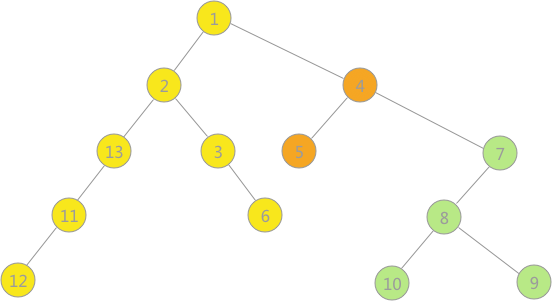
- 构建的深度优先生成森林用孩子兄弟表示法如下所示:3 种颜色的树各代表一棵深度优先生成树,使用孩子兄弟表示法表示,也就是将三棵树的树根相连,第一棵树的树根作为整棵树的树根。
//输入数据如下所示: 13,13 1 2 3 4 5 6 7 8 9 10 11 12 13 1,2 1,3 1,6 1,12 2,13 4,5 7,8 7,10 7,9 8,10 11,12 11,13 12,13
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
4.2 广度优先生成森林
- 非连通图采用广度优先搜索算法进行遍历时,经过的顶点以及边的集合为该图的 广度优先生成森林 。
- C 实现:
#include <stdio.h> #include <stdlib.h> #define MAX_VERtEX_NUM 20 //顶点的最大个数 #define VRType int //表示顶点之间的关系的变量类型 #define InfoType char //存储弧或者边额外信息的指针变量类型 #define VertexType int //图中顶点的数据类型 typedef enum{false,true}bool; //定义bool型常量 bool visited[MAX_VERtEX_NUM]; //设置全局数组,记录标记顶点是否被访问过 typedef struct { VRType adj; //对于无权图,用 1 或 0 表示是否相邻;对于带权图,直接为权值。 InfoType * info; //弧或边额外含有的信息指针 }ArcCell,AdjMatrix[MAX_VERtEX_NUM][MAX_VERtEX_NUM]; typedef struct { VertexType vexs[MAX_VERtEX_NUM]; //存储图中顶点数据 AdjMatrix arcs; //二维数组,记录顶点之间的关系 int vexnum,arcnum; //记录图的顶点数和弧(边)数 }MGraph; typedef struct CSNode{ VertexType data; struct CSNode * lchild;//孩子结点 struct CSNode * nextsibling;//兄弟结点 }*CSTree,CSNode; typedef struct Queue{ CSTree data;//队列中存放的为树结点 struct Queue * next; }Queue; //根据顶点本身数据,判断出顶点在二维数组中的位置 int LocateVex(MGraph * G,VertexType v){ int i=0; //遍历一维数组,找到变量v for (; i<G->vexnum; i++) { if (G->vexs[i]==v) { break; } } //如果找不到,输出提示语句,返回-1 if (i>G->vexnum) { printf("no such vertex.\n"); return -1; } return i; } //构造无向图 void CreateDN(MGraph *G){ scanf("%d,%d",&(G->vexnum),&(G->arcnum)); for (int i=0; i<G->vexnum; i++) { scanf("%d",&(G->vexs[i])); } for (int i=0; i<G->vexnum; i++) { for (int j=0; j<G->vexnum; j++) { G->arcs[i][j].adj=0; G->arcs[i][j].info=NULL; } } for (int i=0; i<G->arcnum; i++) { int v1,v2; scanf("%d,%d",&v1,&v2); int n=LocateVex(G, v1); int m=LocateVex(G, v2); if (m==-1 ||n==-1) { printf("no this vertex\n"); return; } G->arcs[n][m].adj=1; G->arcs[m][n].adj=1;//无向图的二阶矩阵沿主对角线对称 } } int FirstAdjVex(MGraph G,int v) { //查找与数组下标为v的顶点之间有边的顶点,返回它在数组中的下标 for(int i = 0; i<G.vexnum; i++){ if( G.arcs[v][i].adj ){ return i; } } return -1; } int NextAdjVex(MGraph G,int v,int w) { //从前一个访问位置w的下一个位置开始,查找之间有边的顶点 for(int i = w+1; i<G.vexnum; i++){ if(G.arcs[v][i].adj){ return i; } } return -1; } //初始化队列 void InitQueue(Queue ** Q){ (*Q)=(Queue*)malloc(sizeof(Queue)); (*Q)->next=NULL; } //结点v进队列 void EnQueue(Queue **Q,CSTree T){ Queue * element=(Queue*)malloc(sizeof(Queue)); element->data=T; element->next=NULL; Queue * temp=(*Q); while (temp->next!=NULL) { temp=temp->next; } temp->next=element; } //队头元素出队列 void DeQueue(Queue **Q,CSTree *u){ (*u)=(*Q)->next->data; (*Q)->next=(*Q)->next->next; } //判断队列是否为空 bool QueueEmpty(Queue *Q){ if (Q->next==NULL) { return true; } return false; } void BFSTree(MGraph G,int v,CSTree*T){ CSTree q=NULL; Queue * Q; InitQueue(&Q); //根结点入队 EnQueue(&Q, (*T)); //当队列为空时,证明遍历完成 while (!QueueEmpty(Q)) { bool first=true; //队列首个结点出队 DeQueue(&Q,&q); //判断结点中的数据在数组中的具体位置 int v=LocateVex(&G,q->data); //已经访问过的更改其标志位 visited[v]=true; //遍历以出队结点为起始点的所有邻接点 for (int w=FirstAdjVex(G,v); w>=0; w=NextAdjVex(G,v, w)) { //标志位为false,证明未遍历过 if (!visited[w]) { //新建一个结点 p,存放当前遍历的顶点 CSTree p=(CSTree)malloc(sizeof(CSNode)); p->data=G.vexs[w]; p->lchild=NULL; p->nextsibling=NULL; //当前结点入队 EnQueue(&Q, p); //更改标志位 visited[w]=true; //如果是出队顶点的第一个邻接点,设置p结点为其左孩子 if (first) { q->lchild=p; first=false; } //否则设置其为兄弟结点 else{ q->nextsibling=p; } q=p; } } } } //广度优先搜索生成森林并转化为二叉树 void BFSForest(MGraph G,CSTree *T){ (*T)=NULL; //每个顶点的标记为初始化为false for (int v=0; v<G.vexnum; v++) { visited[v]=false; } CSTree q=NULL; //遍历图中所有的顶点 for (int v=0; v<G.vexnum; v++) { //如果该顶点的标记位为false,证明未访问过 if (!(visited[v])) { //新建一个结点,表示该顶点 CSTree p=(CSTree)malloc(sizeof(CSNode)); p->data=G.vexs[v]; p->lchild=NULL; p->nextsibling=NULL; //如果树未空,则该顶点作为树的树根 if (!(*T)) { (*T)=p; } //该顶点作为树根的兄弟结点 else{ q->nextsibling=p; } //每次都要把q指针指向新的结点,为下次添加结点做铺垫 q=p; //以该结点为起始点,构建广度优先生成树 BFSTree(G,v,&p); } } } //前序遍历二叉树 void PreOrderTraverse(CSTree T){ if (T) { printf("%d ",T->data); PreOrderTraverse(T->lchild); PreOrderTraverse(T->nextsibling); } return; } int main() { MGraph G;//建立一个图的变量 CreateDN(&G);//初始化图 CSTree T; BFSForest(G, &T); PreOrderTraverse(T); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
- 177
- 178
- 179
- 180
- 181
- 182
- 183
- 184
- 185
- 186
- 187
- 188
- 189
- 190
- 191
- 192
- 193
- 194
- 195
- 196
- 197
- 198
- 199
- 200
- 201
- 202
- 203
- 204
- 205
- 206
- 207
- 208
- 209
- 210
- 211
- 212
- 213
- 214
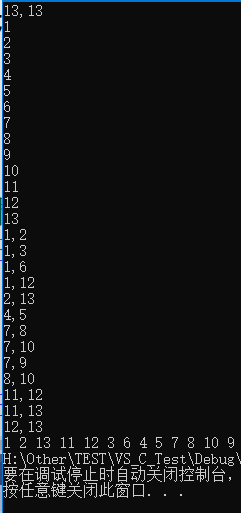
- 使用上述程序存储下图的无向图,输入如下数据,构建广度优先生成森林,得到BFS的输出结果:
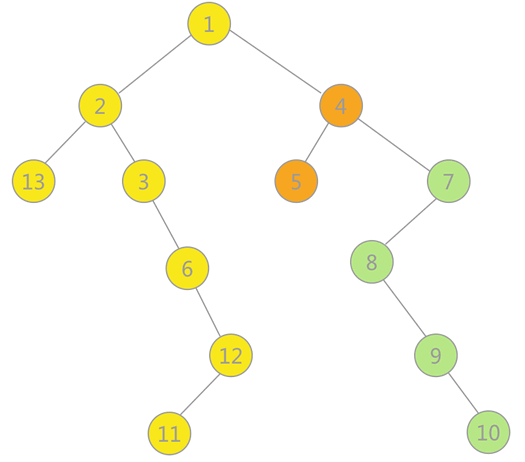
- 对上图通过广度优先搜索得到的广度优先生成森林用孩子兄弟表示法如下图所示:
//输入如下数据: 13,13 1 2 3 4 5 6 7 8 9 10 11 12 13 1,2 1,3 1,6 1,12 2,13 4,5 7,8 7,10 7,9 8,10 11,12 11,13 12,13
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/寸_铁/article/detail/933011
推荐阅读
相关标签

