
热门标签
热门文章
- 1鸿蒙应用开发 闹钟实现_鸿蒙开发实现倒计时
- 2yum安装python3_centos 安装python3详细指南
- 3CSS 详解grid布局(网格布局)与应用
- 4吴恩达机器学习-可选实验室:简单神经网络(Simple Neural Network)
- 5Android N Audio: Audio Track play_audio_port_type_t
- 6AI帮忙做论文笔记——高端Prompt技巧——chatGPT时代背景下文献阅读新范式_阅读论文的prompt
- 7平时多看看---前端中小厂一二线城市薪资水平报告_中厂初级前端月薪多少
- 8H3C-Cloud Lab实验-静态路由配置实验_h3c cloud lab
- 9php添加图片水印类,PHP图片水印类的封装
- 10ft232 mac usb串口驱动_【电路“芯”说】聊聊你知道的串口
当前位置: article > 正文
STM32循迹小车原理介绍和代码示例_stm32小车寻迹代码
作者:凡人多烦事01 | 2024-03-27 01:22:43
赞
踩
stm32小车寻迹代码
目录
1. 循迹模块介绍
- TCRT5000传感器的红外发射二极管不断发射红外线
- 当发射出的红外线没有被反射回来或被反射回来但强度不够大时
- 红外接收管一直处于关断状态,此时模块的输出端为高电平,指示二极管一直处于熄灭状态
- 被检测物体出现在检测范围内时,红外线被反射回来且强度足够大,红外接收管饱和
- 此时模块的输出端为低电平,指示二极管被点亮
- 总结就是一句话,没反射回来,D0输出高电平,灭灯
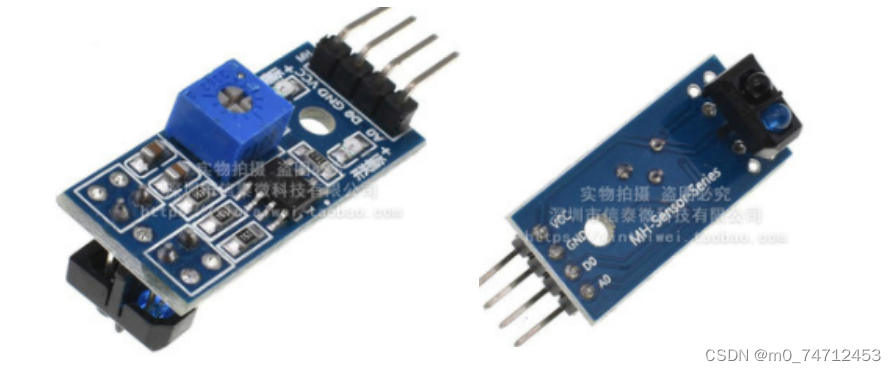
接线方式
- VCC:接电源正极(3-5V)
- GND:接电源负极 DO:TTL开关信号输出0、1
- AO:模拟信号输出(不同距离输出不同的电压,此脚一般可以不接)
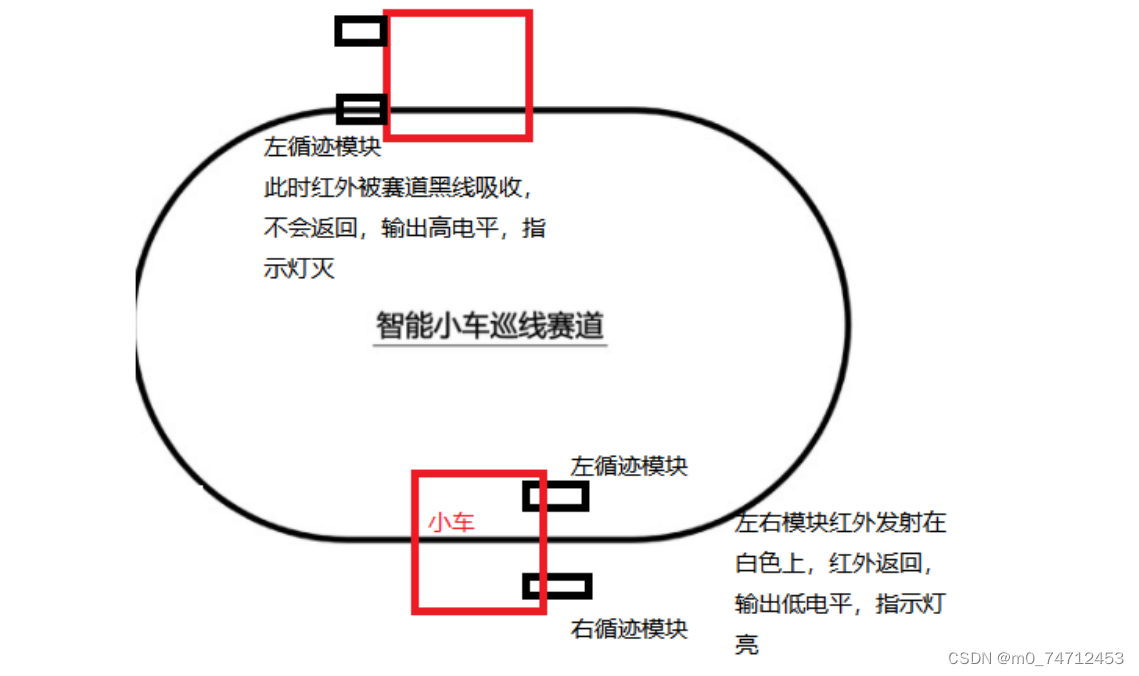
2. 循迹小车原理
由于黑色具有较强的吸收能力,当循迹模块发射的红外线照射到黑线时,红外线将会被黑线吸收,导致 循迹模块上光敏三极管处于关闭状态,此时模块上一个LED熄灭。在没有检测到黑线时,模块上两个LED常亮
总结就是一句话,有感应到黑线,D0输出高电平 ,灭灯
3. 循迹小车核心代码
硬件接线
- B-1A -- PA0
- B-1B -- PB1
- A-1A -- PA1
- A-1B -- PB10
- 循迹模块(左)-- PB3
- 循迹模块(右) -- PB4
代码示例:
- #define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3)
- #define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4)
-
- // main函数里
- while (1)
- {
- if (LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET)
- goForward();
- if (LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET)
- goLeft();
- if (LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET)
- goRight();
- if (LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET)
- stop();
- }
4. 循迹小车解决转弯平滑问题
原理:
两轮都有速度且一轮速度大于另一轮
代码实现:
- #define LeftWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_3)
- #define RightWheel_Value HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_4)
- // main函数里
- while (1)
- {
- if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_RESET)
- {
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,19);
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,19);
- }
- if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_RESET)
- {
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,15);
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,8);
- }
- if(LeftWheel_Value == GPIO_PIN_RESET && RightWheel_Value == GPIO_PIN_SET)
- {
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,8);
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,15);
- }
- if(LeftWheel_Value == GPIO_PIN_SET && RightWheel_Value == GPIO_PIN_SET)
- {
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_1,0);
- __HAL_TIM_SetCompare(&htim2, TIM_CHANNEL_2,0);
- }
- }

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/凡人多烦事01/article/detail/320928
推荐阅读
相关标签

