
- 1离线知识库服务(Langchain-Chatchat)本地搭建_bge-large-zh-v1.5
- 2人工智能导论笔记-第四章-不确定性推理方法_已知输入的模糊集合a=1/a_1 +0.8/a_2 +0.2/a_3 +0.5/a_4 , 输出的模
- 3【深入浅出C#】章节 6: 异常处理和调试:异常的概念和处理机制_c#异常处理机制
- 4基于Python爬虫辽宁丹东二手房数据可视化系统设计与实现(Django框架) 研究背景与意义、国内外研究现状
- 5MMLU数据集分享_cais/mmlu数据集
- 63d怎么两个模型连接圆润?---模大狮模型网
- 7python江苏南京天气预报数据可视化大屏全屏系统设计与实现(django框架)_基于python的天气预测系统研究
- 8拿到字节跳动奖学金,入职字节跳动做科研,他们经历了什么?_浙大毕业生在字节跳动
- 9python 使用 max函数求字典的最大值(lambda表达式)_python编写max函数求两个数最大值
- 10Datawhale 动手学大模型应用开发 第四五章笔记 向量数据库 / Prompt / 检索chain / 记忆_私人数据集检索prompt
stm32、IO口、中断、串口、定时器讲解_串口和定时器
赞
踩
目录
一、IO口的八种模式
输入
浮空输入:浮空,顾名思义,就相当与此端口在默认情况下什么都不接,呈高阻态,这种设置在数据传输时用的比较多。
上拉输入:即通过一个上拉电阻,使它接到vcc
下拉输入:即通过一个下拉电阻,使它接到gnd
模拟输入:一般用于adc数模转换
输出
推挽输出:既可以输出高电平,也可以输出低电平
复用推挽输出:一般是一些复用端口再用,比如uart、iic等
开漏输出::输出端相当于三极管的集电极. 要得到高电平状态需要上拉电阻才行. 适合于做电流型的驱动,其吸收电流的能力相对强(一般20mA以内).
复用开漏输出 :一般用于内外设功能(TX1,MOSI,MISO.SCK.SS)
二、IO口的配置
1. 时钟使能
2. 配置GPIO
3. 初始化GPIO
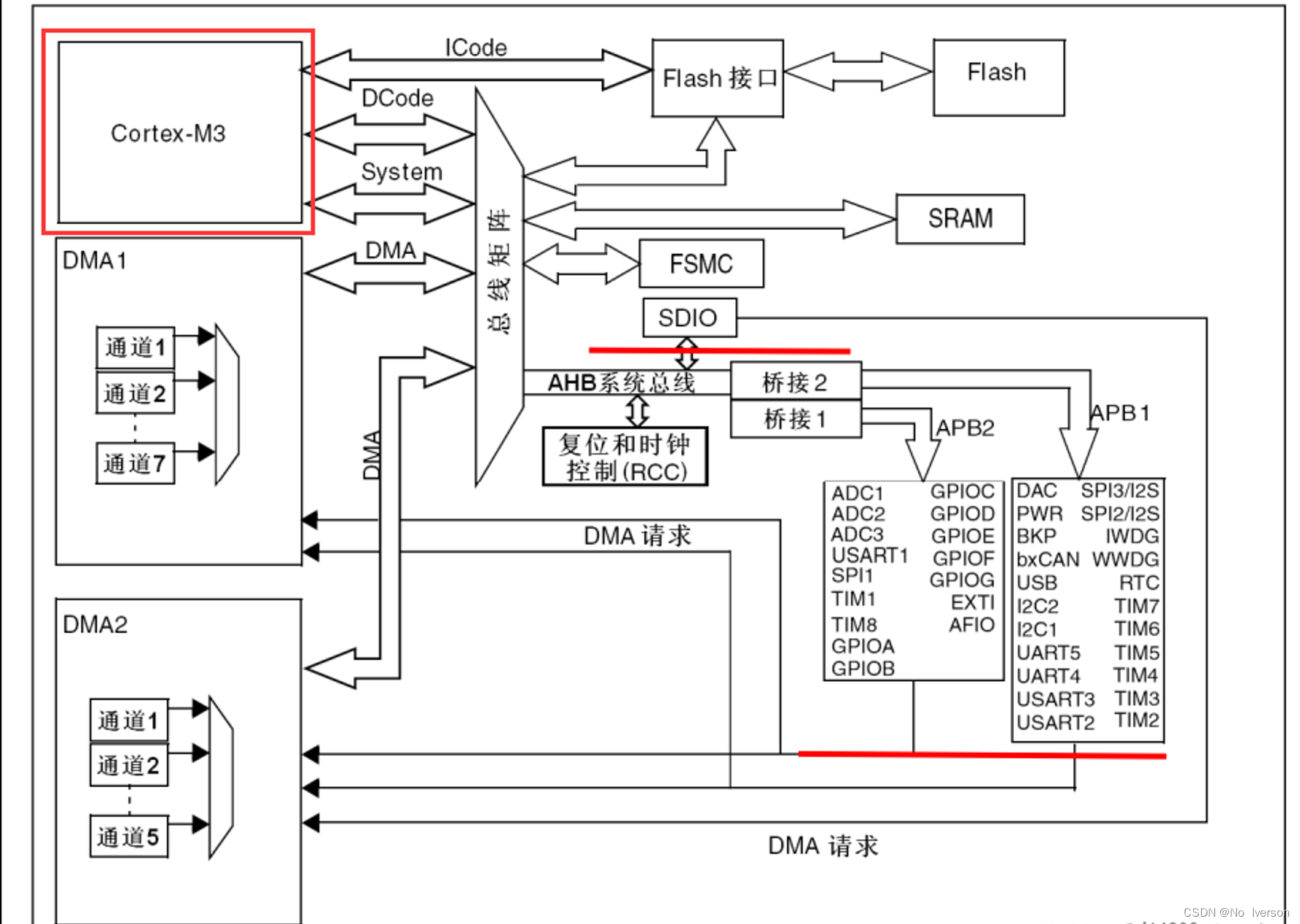
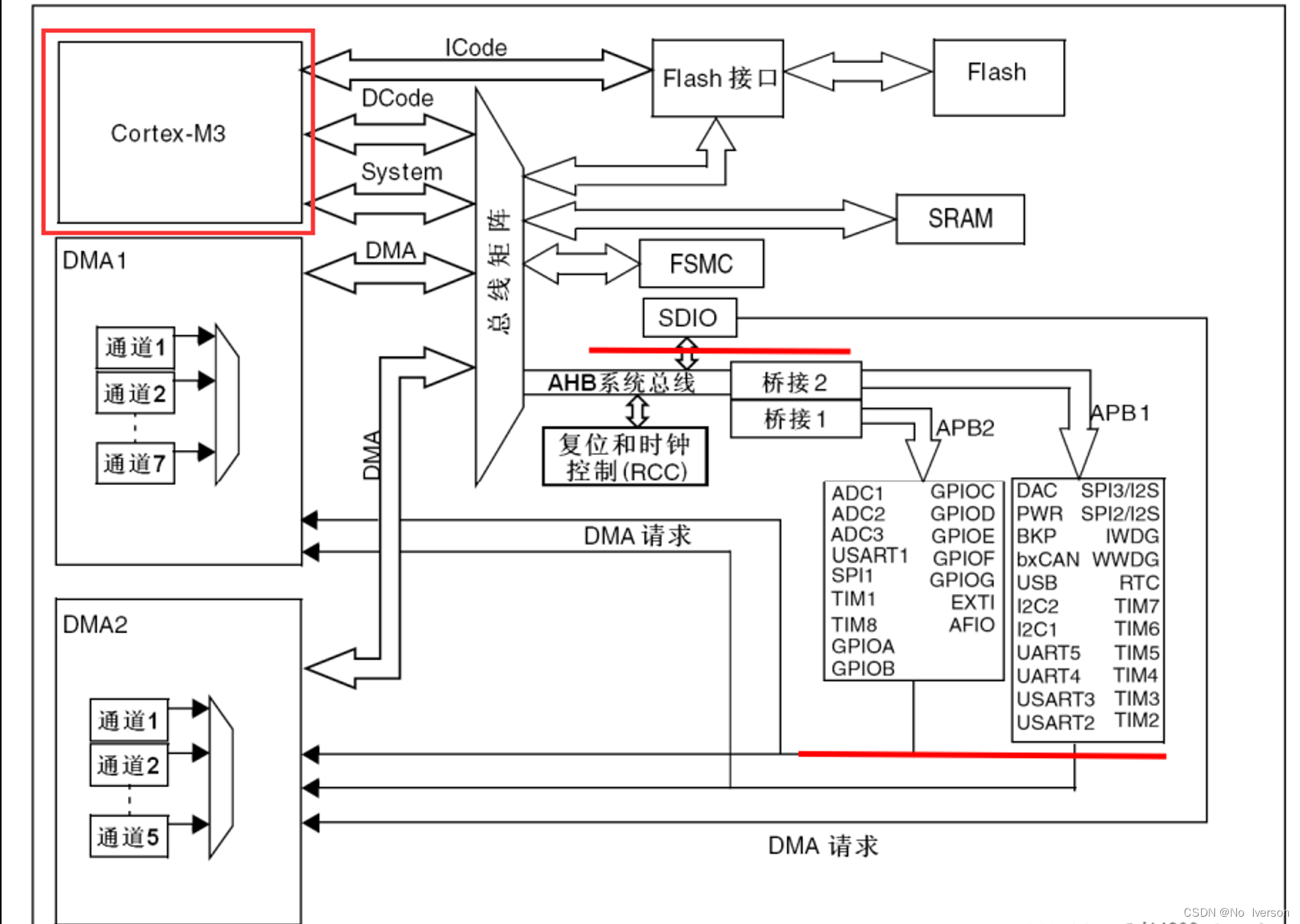
此图片用于M3内核
- /*-------led-------*/
-
- #include "led.h"
-
- void led_Init(void)
- {
- GPIO_InitTypeDef led;
-
- //1.时钟使能
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC , ENABLE);
-
- //2.配置GPIO
-
- led.GPIO_Mode = GPIO_Mode_Out_PP ;
- led.GPIO_Pin = GPIO_Pin_13;
- led.GPIO_Speed = GPIO_Speed_50MHz;
-
- //3.初始化GPIO
-
- GPIO_Init(GPIOC, &led);
- }
-
- /*-------shake-------*/
-
- #include "shake.h"
-
- void shake_Init()
- {
- GPIO_InitTypeDef shake;
-
-
- //1.使能时钟
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
-
- //2.配置GPIO
-
- shake.GPIO_Mode = GPIO_Mode_IPD;
- shake.GPIO_Pin = GPIO_Pin_4;
- shake.GPIO_Speed = GPIO_Speed_10MHz;
-
- //3.初始化GPIO
-
- GPIO_Init(GPIOA, &shake);
-
- }
-
- /*-------relay-------*/
-
- #include "relay.h"
-
- void relay_Init()
- {
- GPIO_InitTypeDef relay;
-
- //1.使能时钟
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA , ENABLE);
-
-
- //2.配置GPIO
-
- relay.GPIO_Mode = GPIO_Mode_Out_PP;
- relay.GPIO_Pin = GPIO_Pin_3;
- relay.GPIO_Speed = GPIO_Speed_10MHz;
-
- //3.初始化GPIO
-
- GPIO_Init(GPIOA, &relay);
-
-
- }
-
- /*-------delay-------*/
-
- #include "delay.h"
-
-
- //us
-
- void delay_us(int delay_us)
- {
- volatile unsigned int num;
- volatile unsigned int t;
-
-
- for (num = 0; num < delay_us; num++)
- {
- t = 11;
- while (t != 0)
- {
- t--;
- }
- }
- }
-
- //ms
- void delay_ms( int delay_ms)
- {
- volatile unsigned int num;
- for (num = 0; num < delay_ms; num++)
- {
- delay_us(1000);
- }
-
- }

三、外部中断配置
1. 配置GPIO并使能时钟
2. 把GPIO映射到对应的中断线
3. 配置外部中断
4. 配置NVIC组
5. 配置NVIC中断控制器
6. 配置中断服务函数
- #include "exit.h"
- #include "shake.h"
-
- void exit_Init()
- {
- EXTI_InitTypeDef exti;
- NVIC_InitTypeDef nvic;
-
- //1.配置GPIO
-
- shake_Init();
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_AFIO, ENABLE); //打开中断用到的时钟
- GPIO_EXTILineConfig( GPIO_PortSourceGPIOA, GPIO_PinSource4 ); //把GPIO映射到对应的中断线---->在GPIO.H
- NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2); //配置NVIC优先级组--->在misc.h
-
-
-
- //2.配置外部中断
-
- exti.EXTI_Line = EXTI_Line4;
- exti.EXTI_Mode = EXTI_Mode_Interrupt;
- exti.EXTI_Trigger = EXTI_Trigger_Falling;
- exti.EXTI_LineCmd = ENABLE;
-
- //3.初始化外部中断
-
- EXTI_Init(&exti);
-
- //4.配置NVIC中断控制器
-
- nvic.NVIC_IRQChannel = EXTI4_IRQn; //中断源---->在misc.c--->stm32f10x.h
- nvic.NVIC_IRQChannelPreemptionPriority = 1;
- nvic.NVIC_IRQChannelSubPriority = 1;
- nvic.NVIC_IRQChannelCmd = ENABLE;
-
- //5.初始化NVIC
-
- NVIC_Init(&nvic);
-
- //6.配置中断服务函数 ----> 在启动文件----用的那个中断源就用那个中断服务函数
- }
四、串口配置
1. 配置GPIO并使能对应时钟
2. 配置串口
3. 配置串口中断
4. 配置NVIC中断控制器
5. 配置中断服务函数
- #include "uart.h"
- #include "stdio.h"
-
- typedef struct __FILE FILE;
-
- void uart_Init()
- {
- GPIO_InitTypeDef txrx;
- USART_InitTypeDef uart;
- NVIC_InitTypeDef nvic;
-
-
- //1.GPIO配置并使能时钟
-
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_GPIOA, ENABLE);
- RCC_APB2PeriphClockCmd( RCC_APB2Periph_USART1, ENABLE);
- NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2); //配置NVIC优先级组--->在misc.h
-
-
- txrx.GPIO_Mode = GPIO_Mode_AF_PP; //复用推挽输出,因为txrx是复用端口
- txrx.GPIO_Pin = GPIO_Pin_9;
- txrx.GPIO_Speed = GPIO_Speed_50MHz;
-
- GPIO_Init(GPIOA, &txrx); //初始化TX
-
- txrx.GPIO_Mode = GPIO_Mode_IN_FLOATING; //因为是接受,所以输入用浮空
- txrx.GPIO_Pin = GPIO_Pin_10;
- //txrx.GPIO_Speed = GPIO_Speed_50MHz; //要不要都一样,因为速度是输出才用
-
- GPIO_Init(GPIOA, &txrx); //初始化RX
-
-
- //2.配置串口
-
- uart.USART_BaudRate = 9600;
- uart.USART_WordLength = USART_WordLength_8b;
- uart.USART_StopBits = USART_StopBits_1;
- uart.USART_Parity = USART_Parity_No;
- uart.USART_HardwareFlowControl = USART_HardwareFlowControl_None;
- uart.USART_Mode = USART_Mode_Rx|USART_Mode_Tx;
-
- USART_Cmd(USART1,ENABLE ); //使能串口
-
- //3.初始化串口
-
- USART_Init(USART1, &uart);
-
- //4.设置串口中断类型
-
- USART_ITConfig(USART1, USART_IT_RXNE , ENABLE); //接收中断
-
-
- //5.配置NVIC
-
- nvic.NVIC_IRQChannel = USART1_IRQn; //中断源---->在misc.c--->stm32f10x.h
- nvic.NVIC_IRQChannelPreemptionPriority = 1;
- nvic.NVIC_IRQChannelSubPriority = 1;
- nvic.NVIC_IRQChannelCmd = ENABLE;
-
- NVIC_Init(&nvic);
-
-
- }
-
-
- void sendBits(USART_TypeDef* USARTx, uint16_t Data) //发送一个字符
- {
-
- USART_SendData( USARTx, Data);
- while( USART_GetFlagStatus(USART1, USART_FLAG_TXE )!= SET);
-
- }
-
- void sendStr(USART_TypeDef* USARTx, char *Data) //发送一个字符串
- {
- while(*Data != '\0')
- {
- sendBits(USARTx,*Data);
- Data++;
-
- }
- }
-
-
- int fputc(int ch , FILE * p) //printf重定向----<把打印到显示屏的数据,改成打印到串口>
- {
- USART_SendData( USART1, ch);
- while( USART_GetFlagStatus(USART1, USART_FLAG_TXE )!= SET);
-
-
- return ch;
-
- }
-
- void USART1_IRQHandler() //6.中断服务函数
- {
- char buf;
-
- if( ( USART_GetITStatus(USART1, USART_IT_RXNE)) == SET) //等于SET就说明已经产生一个中断标志位
- {
- buf = USART_ReceiveData( USART1);
-
- if(buf == 'o')
- {
- sendStr(USART1, "ok");
- printf("666"); //---<因为printf本身就可以携带字符串,所以执行fputc,是一位一位给SendData发送的>
-
- //while( USART_GetFlagStatus(USART1, USART_FLAG_TXE )!= SET); //USART_FLAG_TXE是发送完成标志,== 0,说明发送完成
- }
-
- }
-
- USART_ClearFlag( USART1,USART_FLAG_TXE );//清除中断标志
- }
printf重定义
就是把fputc这个函数原本打印到显示器的数据,给它改到串口
五、定时器
1. 定时器配置并使能时钟
2. 配置定时器中断 (T=(重装值)*(预分频系数)/72Mhz)
3. 配置NVIC中断控制器
4. 编写中断服务函数
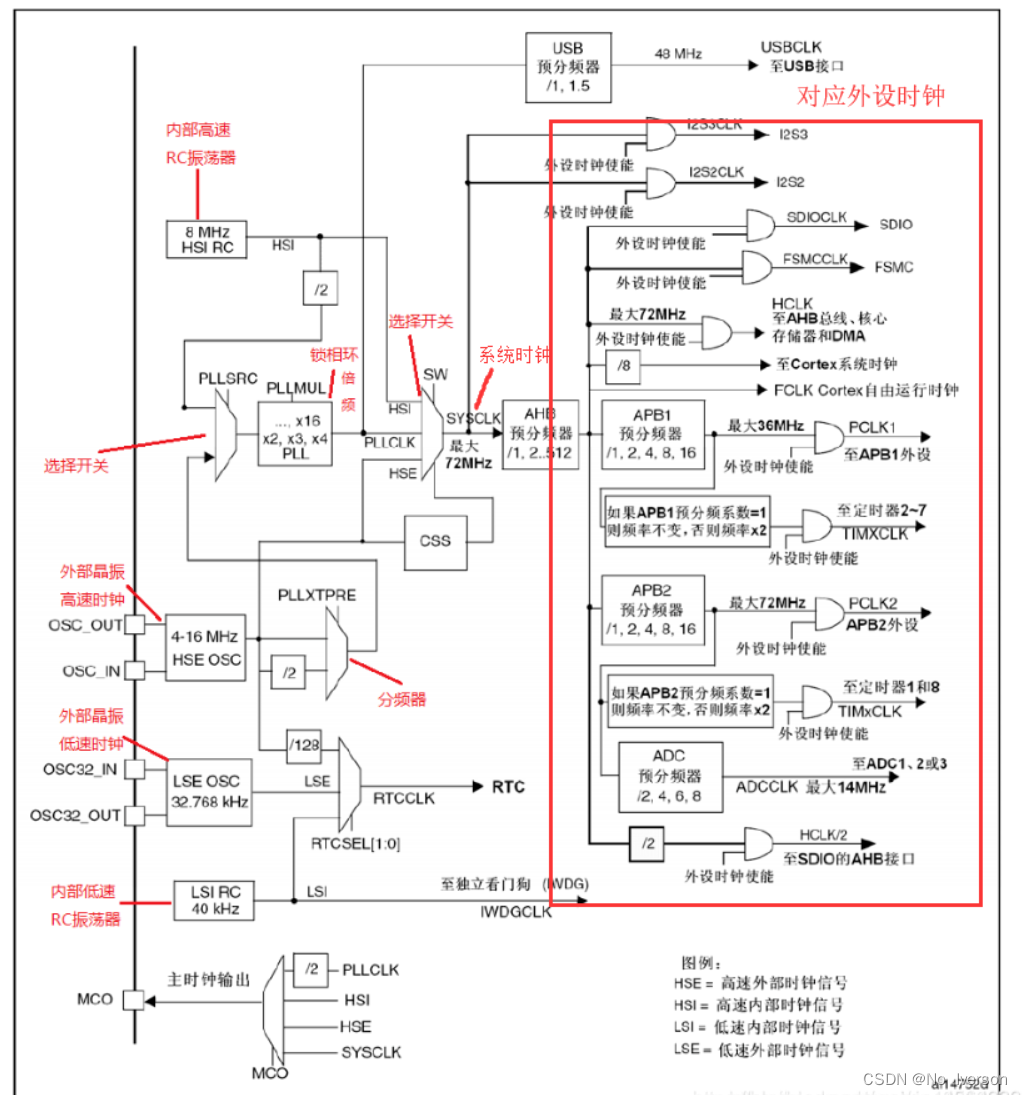
时钟树
- #include "time.h"
- #include "uart.h"
-
- void time_Init()
- {
-
- TIM_TimeBaseInitTypeDef time;
- NVIC_InitTypeDef nvic;
- RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM2,ENABLE );
- NVIC_PriorityGroupConfig( NVIC_PriorityGroup_2);
-
-
- //1.定时器配置
-
- time.TIM_Prescaler = 7200-1; //预分频系数
- time.TIM_Period = 10000-1; //自动重装
- time.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频,设置定时器时钟CK_INT频率与数字滤波采样
- time.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
-
- //2.定时器初始化并使能
-
- TIM_TimeBaseInit( TIM2, &time);
- TIM_Cmd(TIM2, ENABLE);
-
- //3.配置定时器中断
-
- TIM_ITConfig( TIM2, TIM_IT_Update, ENABLE);
-
-
- //4.配置NVIC中断控制器
-
- nvic.NVIC_IRQChannel = TIM2_IRQn; //中断源---->在misc.c--->stm32f10x.h
- nvic.NVIC_IRQChannelPreemptionPriority = 1;
- nvic.NVIC_IRQChannelSubPriority = 1;
- nvic.NVIC_IRQChannelCmd = ENABLE;
-
- NVIC_Init(&nvic);
-
-
- }
-
- //5.中断服务函数
-
- void TIM2_IRQHandler()
- {
-
-
- if(TIM_GetITStatus( TIM2, TIM_IT_Update ) == SET)
- {
-
- TIM_ClearITPendingBit( TIM2, TIM_IT_Update );//清除定时器中断标志位
-
-
- USART_SendData( USART1, 'a');
- while( USART_GetFlagStatus(USART1, USART_FLAG_TXE )!= SET);
-
- }
-
-
-
- }
systick定时器
1. 配置时钟源(可以72mhz/9mhz)
2. 配置重装值
3. 向下递减到0触发中断退出定时器
4. 关闭定时器
- #include "systick.h"
-
- void Delay_ms(int ms) //最大24位
- {
- int i;
- SysTick_Config(72000);
-
- for(i = 0; i < ms;i++ )
- {
- while(!(SysTick->CTRL)& 1<<16 );
-
- }
-
- SysTick->CTRL &=~SysTick_CTRL_ENABLE_Msk;
-
- }
-
- void Delay_us(int us) //最大24位
- {
- int i;
- SysTick_Config(72);//重装定时器值,t = 重装值*(1/72mhz),反过来讲7200就是,72000*(1/72MHz)=1/1000=1(ms)
-
- for(i = 0; i < us;i++ )
- {
- while(!(SysTick->CTRL)& 1<<16 );//如果数到了0,则该为为1
-
- }
-
- SysTick->CTRL &=~SysTick_CTRL_ENABLE_Msk; //关闭计数器 置0
-
- }
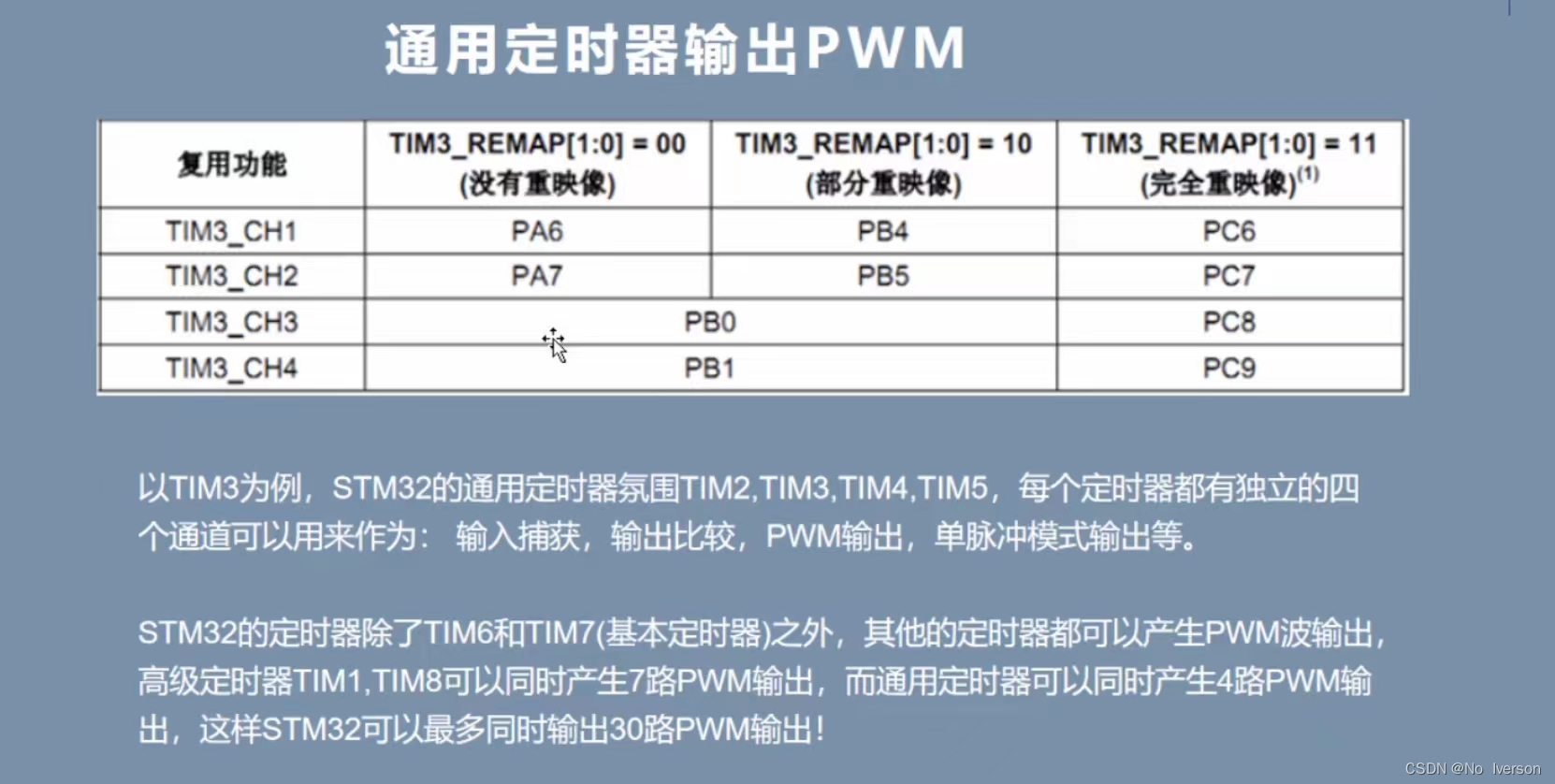
PWM模式
1 .使能时钟和使能AFIO时钟(因为需要引脚复用)
2. 调用函数进行引脚映射
3. GPIO配置 (这里我们用的定时器3通道2)
4. 定时器配置
5. pwm配置
6. pwm初始化,并使能pwm和使能rcc
- #include "pwm.h"
-
- void pwm_Init()
- {
- GPIO_InitTypeDef dj;
- TIM_TimeBaseInitTypeDef time;
- TIM_OCInitTypeDef pwm;
-
-
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE); //用于映射到这个引脚,打开这个引脚的时钟
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_AFIO, ENABLE); //引脚复用,必须打开这个时钟
- RCC_APB1PeriphClockCmd( RCC_APB1Periph_TIM3,ENABLE ); //使能定时器3的时钟
-
- GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3 , ENABLE ); //指定管脚映射
-
- //1.GPIO配置
-
- dj.GPIO_Mode = GPIO_Mode_AF_PP;
- dj.GPIO_Pin = GPIO_Pin_5; //*****用的定时器3通道2******
- dj.GPIO_Speed = GPIO_Speed_50MHz;
-
- GPIO_Init( GPIOB, &dj);
-
- //2.定时器配置
-
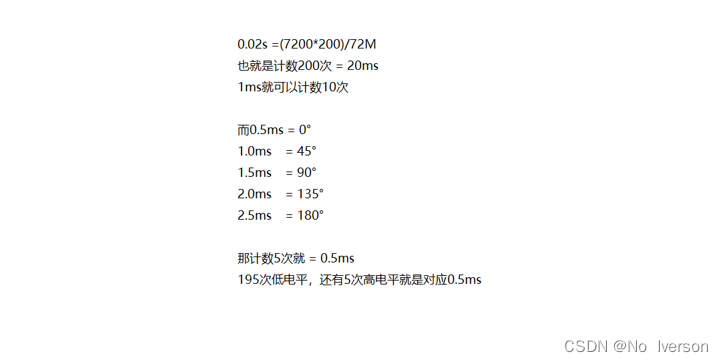
- time.TIM_Prescaler = 7200-1; //自动重装
- time.TIM_Period = 200-1; //预分频系数
- time.TIM_ClockDivision = TIM_CKD_DIV1;//时钟分频,设置定时器时钟CK_INT频率与数字滤波采样
- time.TIM_CounterMode = TIM_CounterMode_Up; //向上计数
-
- TIM_TimeBaseInit( TIM3, &time);
-
- //3.PWM配置
-
- pwm.TIM_OCMode = TIM_OCMode_PWM1; //选择pwm1模式,如果定时器向上计数,一旦cnt<crr时,通道为有效电平,定时器向下则无效电平,pwm2则相反
- pwm.TIM_OutputState = TIM_OutputState_Enable; //使能比较输出,就是打开把输出的电平给到重映射的引脚上
- pwm.TIM_OCPolarity = TIM_OCPolarity_Low; //选择有效电平为低电平
-
- //4.pwm初始化并使能ccr并使能定时器3
-
- TIM_OC2Init( TIM3, &pwm );
- TIM_OC2PreloadConfig(TIM3,TIM_OCPreload_Enable);
- TIM_Cmd(TIM3, ENABLE);
-
-
-
- }
-
- #include "stm32f10x.h"
- #include "delay.h"
- #include "pwm.h"
-
- int main()
- {
-
- pwm_Init();
-
- TIM_SetCompare2(TIM3, 195); //设置比较值
-
- while(1)
- {
- delay_ms(1000);
- TIM_SetCompare2(TIM3, 175); //设置比较值,180°
- delay_ms(1000);
- TIM_SetCompare2(TIM3, 195); //设置比较值,0°
-
-
-
-
-
- }
-
- }
DMA(直接寄存器访问)
DMA传输将数据从一个地址空间复制到另一个地址空间,提供在外设和存储器之间或者存储器和存储器之间的高速数据传输
我们知道CPU有转移数据、计算、控制程序转移等很多功能,系统运作的核心就是CPU,那我们可不可以减轻消耗cpu的资源呢?
有,我们可以直接让内存->外设、外设->内存,内存->内存,因为有dma,它不需要经过cpu,可以直接访问flash或SRAM。
1. 配置DMA
2. 初始化/使能DMA
3. 使能串口DMA(这里用的内存->串口)
4. 获取DMA标志位、判断是否发送完成
- /*
-
- 内存->外设
- */
-
- #include "dma.h"
-
- void dma_Init(DMA_Channel_TypeDef* DMAy_Channelx,u32 *paddr,u32 *maddr,u16 size)
- {
- DMA_InitTypeDef dma;
- RCC_AHBPeriphClockCmd(RCC_AHBPeriph_DMA1, ENABLE);
-
- //1.配置dma
-
- dma.DMA_PeripheralBaseAddr = (u32)paddr; //外设地址,是u32位,所以要强转
- dma.DMA_MemoryBaseAddr = (u32)maddr; //内存地址,是u32位
- dma.DMA_DIR = DMA_DIR_PeripheralDST; //传输方向,我们选择从内存到外设
- dma.DMA_BufferSize = size; //设置一次传输的大小,最大传输65536
- dma.DMA_PeripheralInc = DMA_PeripheralInc_Disable; //设置传输数据外设地址是否递增
- dma.DMA_MemoryInc = DMA_MemoryInc_Enable; //设置传输数据内存地址是否递增
- dma.DMA_PeripheralDataSize = DMA_PeripheralDataSize_Byte; //设置外设的数据长度为多少字节传输
- dma.DMA_MemoryDataSize = DMA_MemoryDataSize_Byte; //设置内存的数据长度为多少地址传输
- dma.DMA_Mode = DMA_Mode_Normal; //设置模式,是循环发送,还是只发送一次
- dma.DMA_Priority = DMA_Priority_High; //设置dma的通道优先级,一共有低、中、高、很高4个优先级
- dma.DMA_M2M = DMA_M2M_Disable; //这是设置内存到内存的使能
-
- //2.初始化dma
-
- DMA_Init(DMAy_Channelx , &dma); //用参数传递通道,提高使用性
-
- }
-
-
- void dma_Enable(DMA_Channel_TypeDef* DMAy_Channelx,uint16_t size)
- {
- DMA_Cmd(DMAy_Channelx, DISABLE); //先失能
- DMA_SetCurrDataCounter( DMAy_Channelx, size); //设置数据传输量
- DMA_Cmd(DMAy_Channelx, ENABLE); //使能
-
- }
- #include "stm32f10x.h"
- #include "delay.h"
- #include "dma.h"
- #include "uart.h"
-
- #define SIZE 2000
-
- u8 maddr[SIZE]; //定义maddr
-
- void maddr_Init(u8 * p)
- {
- int i = 0;
- for(i = 0; i < SIZE;++i)
- {
- *p = '5';
- p++;
- }
- }
-
- int main()
- {
- uart_Init();
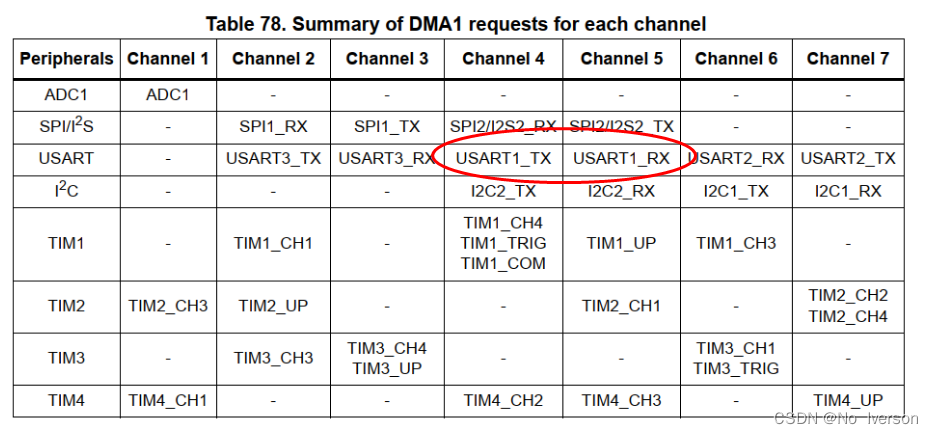
- dma_Init( DMA1_Channel4,(u32 *)&USART1->DR, (u32 *)maddr, SIZE); //初始化dma---USART1->DR---(串口的数据寄存器,也就是这里的外设地址)
-
- maddr_Init(maddr); //给内存地址写值
- USART_DMACmd( USART1, USART_DMAReq_Tx, ENABLE); //使能外设,并配置成发送
- dma_Enable(DMA1_Channel4, SIZE); //使能dma1通道
-
- while(1)
- {
- if(DMA_GetFlagStatus( DMA1_FLAG_TC4) == SET) //判断是否发送完成
- {
- DMA_ClearFlag( DMA1_FLAG_TC4); //发送完成清除标志
-
- break; //打破while,只执行一次
-
- }
-
- }
-
-
- }

