
- 1微信小程序获取手机号(Java后端)_微信小程序 getphonenumber
- 2树莓派 默认波特率_树莓派初次使用的基本配置.md
- 3图解微信小程序---scroll_view实现首页排行榜布局
- 4MarkDown编辑器在线
- 5LoRa无线通信技术介绍(一)调制技术
- 651单片机红外遥控小车_51单片机智能小车红外遥控器
- 7力扣第210题“课程表 II”
- 8经典论文复现|手把手带你复现ICCV 2017经典论文—PyraNet
- 9决策树学生成绩python_基于Python数据分析之pandas统计分析
- 10Xilinx FPGA中的基础逻辑单元--CLB/Block Memory/DSP/Transceivers/IO_fpga中的单元
kaggle:Digit Recognizer《手写数字识别》你的第一个图像识别竞赛项目_图像识别 竞赛
赞
踩
导语
在上一篇博客中,我描述了该如何参加自己的第一个竞赛项目《泰坦尼克号》,旨在引领你完成自己的第一次竞赛,并让你了解一些机器学习的入门知识,初步学会该如何处理表格型数据。而这次将领你走进深度学习:图像识别的大门。
赛事描述
这项竞赛使用了MNIST(Modified National Institute of Standards and Technology)美国国家标准与技术研究院收集整理的大型手写数字数据库。你需要从数万张手写测试图像中正确识别数字。
正式开始
一.参加比赛
跟之前操作相同,这是竞赛界面Digit Recognizer | Kaggle
二.数据集概览
在竞赛界面可以找到data界面来查看比赛数据,共有三个数据文件(1) train.csv, (2) test.csv, (3) gender_submission.csv。
你也可以下载这些数据集在本地进行分析。
(1) train.csv
train.csv 和 test.csv 包含从0到9的手绘数字的灰度图像。每张图像的高度为 28 像素,宽度为 28 像素,总共为 784 像素。每个像素都有一个与之关联的像素值,指示该像素的亮度或暗度,数字越大表示越暗。此像素值是介于 0 和 255 之间的整数(包括 0 和 255)。
train.csv 有 785 列。第一列是标签(label),表示用户绘制的数字;其余列是关联图像的像素值。训练集中的每个像素列都有一个类似于 pixelx 的名称,其中 x 是介于 0 和 783 之间的整数(包括 0 和 783)。
(2) test.csv
test.csv文件中的数据表现形式几乎与train.csv文件中一致,但缺少了label列,所以我们需要正确识别手写数字图像。
(3) sample_submission.csv
比赛提供的sample_submission.csv文件是一个示例,显示了应该如何构建预测并提交。它包含了ImageId和Label两列。所以就像这个文件一样,我们的提交应该具有:
"ImageId" 列,表示test.csv中每张图像的id。即第一张图像id为1......
"Label" 列,表示我们预测图像所代表的数字。
三.编写代码
(1)导入包
- import pandas as pd
- import numpy as np
- import torch
- import torch.nn as nn
- import torch.optim as optim
- from torch.utils.data import Dataset, DataLoader
- from torchvision import models, transforms
- import torch.optim.lr_scheduler as lr_scheduler
- from tqdm import tqdm
- from sklearn.metrics import confusion_matrix
- from sklearn.metrics import accuracy_score
- from sklearn.model_selection import train_test_split
- import seaborn as sns
- import matplotlib.pyplot as plt
(2)数据集加载和初步分析
1.加载数据
- # 加载数据
- train_data=pd.read_csv("/kaggle/input/digit-recognizer/train.csv")
- test_data=pd.read_csv("/kaggle/input/digit-recognizer/test.csv")
train_data.head()
test_data.head()
2.查看数据简要信息并检查是否有缺失值
train_data.info() 
test_data.info()
观察后发现数据集中并没有缺失值,isnull函数用于判断数据中是否有缺失值,describe函数进行统计,从unique可以看出,只存在一个唯一值,且类型为false,所以数据中并不存在缺失值。
train_data.isnull().any().describe()
test_data.isnull().any().describe()
print(f"训练集有{len(train_data)}个样本数据,测试集有{len(test_data)}个样本数据")![]()
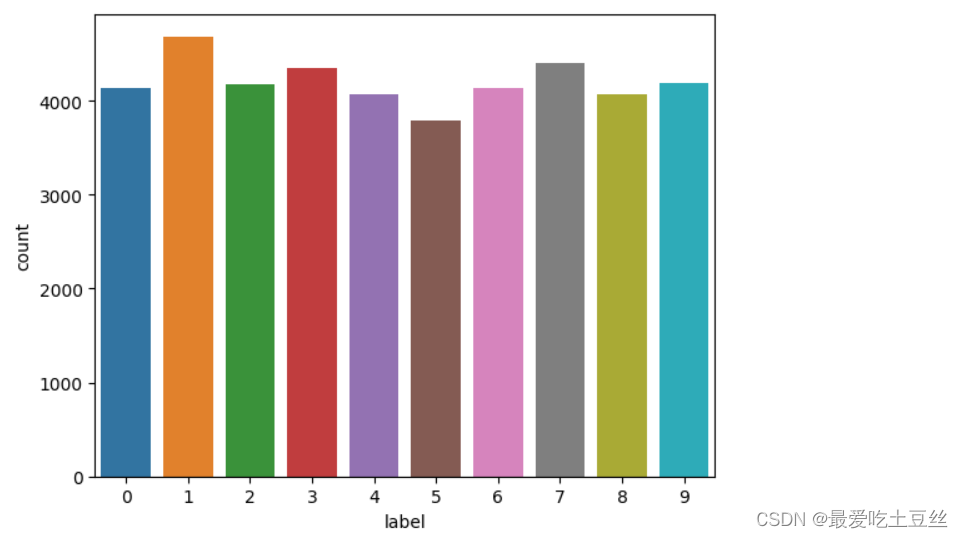
3.训练集数据分布可视化
对训练集中手写数字分布进行可视化,数字从0-9基本均匀分布,因为基本均匀分布,所以在后续划分数据集时并不需要分层抽取,使用train_test_split随机划分。
- #统计训练集中数字分布频次
- sns.countplot(x=train_data.label)
- plt.xlabel("label")
- plt.ylabel("count")
- plt.show()
(3)数据预处理
1.数据集划分及类型转换
对训练集数据进行处理,再分割以便后续操作,如评价模型等。
- train_labels = train_data["label"].values
- train_images = train_data.drop(labels=["label"], axis=1)
进行数据的转换,确保能与模型兼容。
- train_images = train_images.values.astype(np.float32)
- test_images = test_data.values.astype(np.float32)
X_train, X_val, Y_train, Y_val = train_test_split(train_images, train_labels, test_size = 0.2, random_state=41)将数据从一维向量转换为二维矩阵,28*28对应数据集图像尺寸,满足模型输入要求。
- X_train = X_train.reshape(-1, 28, 28)
- X_val = X_val.reshape(-1, 28, 28)
- test_images = test_images.reshape(-1, 28, 28)
2.自定义Dataset 类
自定义MNISTDataset 的类,继承自 PyTorch 的 Dataset 类。用于将 MNIST 数据集封装成 PyTorch 可用的数据格式,并提供数据加载和预处理功能。
- class MNISTDataset(Dataset):
- def __init__(self, data, labels=None, transform=None):
- self.data = data
- self.labels = labels
- self.transform = transform
- self.indices = np.arange(len(data))#原始数据的索引
-
- def __len__(self):
- return len(self.data)
-
- def __getitem__(self, idx):
- image = self.data[idx]
- if self.transform:
- image = self.transform(image)
- if self.labels is not None:
- label = self.labels[idx]
- return image, torch.tensor(label).long(), self.indices[idx] #返回索引
- else:
- return image

3.数据增强
因为手写数字图像很简单,所以不建议进行过度的数据增强,在测试中,我在增加了弹性形变和高斯模糊后,反复调整参数,模型性能并没有得到提升,反而降低了训练速度,当然,也许是我并没有提升训练轮次的原因,你可以在这一方面,进行测试。
- # 定义数据增强操作
- transform = transforms.Compose([
- transforms.ToPILImage(),#将输入数据转换为PIL图像格式
- transforms.RandomRotation(degrees=10), # 旋转角度范围
- transforms.RandomAffine(degrees=0, translate=(0.1, 0.1), scale=(0.9, 1.1)), # 平移和缩放
- transforms.ToTensor(),#将PIL图像格式转换为pytorch张量
- transforms.Normalize(mean=[0.5], std=[0.5]) # 标准化
- ])
4.加载数据
pytorch框架下处理数据方式,使用Dataset 和 DataLoader加载数据,便于训练模型,数据增强等操作。
- # 创建 Dataset 和 DataLoader
- train_dataset = MNISTDataset(X_train, Y_train, transform=transform)
- val_dataset = MNISTDataset(X_val, Y_val,transform=transform)
- test_dataset = MNISTDataset(test_images,transform=transform)
-
- train_loader = DataLoader(train_dataset, batch_size=96, shuffle=True)
- val_loader = DataLoader(val_dataset, batch_size=96, shuffle=False)
- test_loader = DataLoader(test_dataset, batch_size=96, shuffle=False)
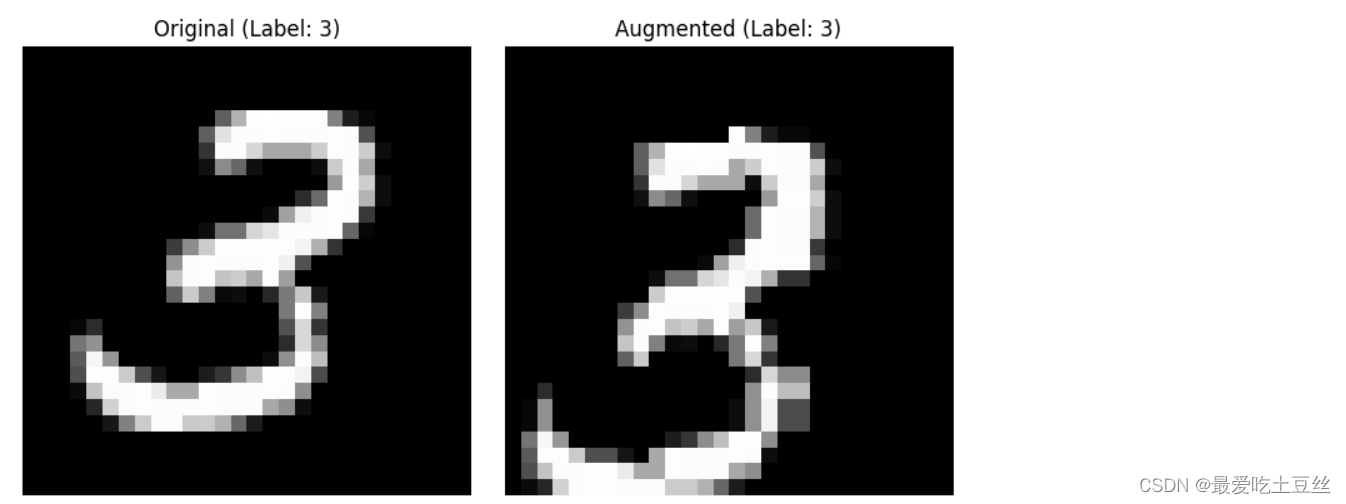
5.增强前后可视化对比
对数据增强前后图像进行对比(只截取了部分)
- # 获取一个批次的训练数据
- images, labels, indices = next(iter(train_loader)) # 获取索引
-
- # 选择要显示的图像数量
- num_images = 4
-
- # 创建图形和子图
- fig, axes = plt.subplots(nrows=num_images, ncols=2, figsize=(8, 4 * num_images))
-
- # 循环遍历图像并显示
- for i in range(num_images):
- # 原始图像
- original_image = X_train[indices[i]] # 使用索引获取原始图像
-
- # 增强后的图像
- augmented_image = images[i].permute(1, 2, 0).numpy()
-
- # 显示图像
- for j, img in enumerate([original_image, augmented_image]):
- axes[i, j].imshow(img, cmap='gray')
- axes[i, j].set_title(f"{'Original' if j == 0 else 'Augmented'} (Label: {labels[i]})")
- axes[i, j].axis('off')
-
- plt.tight_layout()
- plt.show()
(4)模型及评估预测
1.模型选择构建
模型选择:
在该项目中我选择了自己构建cnn模型、加载resnet18和densenet121预训练模型这3种方式对项目进行拟合预测,以30轮训练轮次为基准,kaggle(GPU:P100),因为并无严格参数对照,且每种模型的结构不同,所以并不具有参考意义,在拟合过程中:
-
准确率:cnn:98.7%左右,resnet18:99%左右,densenet121:99.6%左右
-
训练速度:自构建cnn模型>resnet18模型>densenet121模型(主要与模型复杂度有关)
综合:
虽然densenet121模型具有较高的准确率,但这是牺牲大量训练时间来实现的,且模型结构复杂,调整模型结构效率不高。所以在模型初步搭建时,你可以选择自己构建cnn模型进行拟合预测,观察拟合曲线,训练速度的变化,并调整参数或模型结构,之后再进一步使用更加复杂的模型,在这里我选择了resnet模型和densenet模型。在熟悉了常用各种模型的基本结构后,你就可以根据项目选择适合该项目的预训练模型,再进行调整,这样就可以节省大量模型搭建过程中的时间。
DenseNet121模型:
加载 DenseNet121 预训练模型:
修改第一层卷积层以匹配单通道输入,因为MNIST 数据集是单通道灰度图像,因此需要将输入通道数改为 1,其他参数保持不变。因为MNIST 数据集规模小,且图像尺寸不大,所以移除最后一个 Dense Block (transition3)来降低模型的复杂度,减少参数数量,并加快训练速度。
-
移除 Dense Block 后,需要重新计算全连接层的输入特征数 (num_ftrs)
-
创建一个虚拟输入 x,并将其传递给修改后的 model.features 部分,得到输出 x
-
num_ftrs 就是输出 x 的第二个维度的大小 (通道数)
-
将 DenseNet121 的原始分类器替换为一个新的分类器,包含两个全连接层,一个 ReLU 激活函数和一个 Dropout 层
-
第一个全连接层的输入特征数为 num_ftrs,输出特征数为 1000
-
第二个全连接层的输入特征数为 1000,输出特征数为 10 (MNIST 数据集的类别数)
-
Dropout 层可以帮助降低过拟合的风险
模型架构 :
Input Image --> Conv1 --> MaxPool --> Dense Block 1 --> Transition Layer --> Dense Block 2 --> Transition Layer --> Dense Block 3 --> Transition Layer --> Dense Block 4 --> Global Average Pooling --> FC Layer --> Output
架构解析:
1. 密集连接 (Dense Connectivity):
-
DenseNet 的核心思想是密集连接,即每个层都与其所有后续层直接相连。 这与传统的 CNN 不同,传统的 CNN 中,每层只与其下一层相连。
-
密集连接的优势在于:
-
缓解梯度消失问题: 由于梯度可以直接从损失函数传递到前面的层,即使网络很深,梯度也不会消失。
-
特征重用: 每一层都可以利用之前所有层的特征信息,从而学习更丰富的特征表示。
-
减少参数数量: 由于特征重用,DenseNet 可以使用更少的参数来达到相同的性能。
-
2. Dense Block:
-
DenseNet 由多个 Dense Block 组成,每个 Dense Block 包含多个卷积层。
-
在每个 Dense Block 中,每一层的输入是之前所有层的输出的拼接。
-
每个 Dense Block 的输出是所有层的输出的拼接。
-
Dense Block 中的卷积层通常使用 1x1 卷积进行降维,减少计算量。
3. Transition Layer:
-
Dense Block 之间通过 Transition Layer 连接,用于降维和控制特征图的尺寸。
-
Transition Layer 通常包含一个 1x1 卷积和一个平均池化层。
4. DenseNet121 结构:
-
DenseNet121 包含 121 层,其中包括 4 个 Dense Block,每个 Dense Block 分别包含 6、12、24 和 16 个卷积层。
-
每个 Dense Block 之间有一个 Transition Layer。
-
在最后一个 Dense Block 之后,使用全局平均池化层将特征图转换为一个向量。
-
最后使用一个全连接层进行分类。
注:该模型调整并不完善,只是一个初步思路,根据对模型架构的解析,你可以根据你的想法作出进一步调整,注意判断模型是否过拟合。
- # 加载 DenseNet121 模型 (预训练)
- model = models.densenet121(pretrained=True)
-
- # 修改第一层卷积层以匹配单通道输入
- model.features.conv0 = nn.Conv2d(1, 64, kernel_size=5, stride=1, padding='same', bias=False)
-
- # 移除最后一个 Dense Block (transition3)
- model.features = nn.Sequential(*list(model.features.children())[:-4])
-
- # 重新获取 num_ftrs
- x = torch.randn(1, 1, 28, 28) # 创建一个虚拟输入
- x = model.features(x)
- num_ftrs = x.size(1)
-
- # 修改最后一层分类器
- model.classifier = nn.Sequential(
- nn.Linear(num_ftrs, 1000),
- nn.ReLU(),
- nn.Dropout(p=0.5),
- nn.Linear(1000, 10)
- )
简单cnn模型:
模型包含两个卷积层、两个最大池化层、三个 Dropout 层和两个全连接层。 通过这些层的组合,模型可以学习从输入图像中提取特征,并进行分类。
class CNN(nn.Module):
-
定义一个名为 CNN 的类,继承自 PyTorch 的 nn.Module 类。
-
nn.Module 是 PyTorch 中所有神经网络模块的基类,它提供了一些基本的功能,例如参数管理、模型保存和加载等。
def __init__(self):
-
这是类的构造函数,用于初始化模型的各个层。
-
super(CNN, self).__init__(): 调用父类的构造函数,确保 nn.Module 的初始化工作完成。
模型层定义:
-
self.conv1 = nn.Conv2d(1, 32, kernel_size=5, padding='same'):
-
创建第一个卷积层 (conv1),使用 32 个 5x5 的卷积核。
-
in_channels=1:输入通道数为 1,因为 MNIST 数据集是灰度图像。
-
out_channels=32:输出通道数为 32,表示该层会生成 32 个特征图。
-
padding='same':使用 'SAME' 填充模式,确保卷积操作后输出特征图的大小与输入相同。
-
-
self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2):
-
创建第一个最大池化层 (pool1),使用 2x2 的池化窗口和步长为 2。
-
这会将特征图的高度和宽度都减半。
-
-
self.dropout1 = nn.Dropout(p=0.25):
-
创建第一个 Dropout 层 (dropout1),以 0.25 的概率随机丢弃神经元,用于防止过拟合。
-
-
self.conv2 = nn.Conv2d(32, 64, kernel_size=5, padding='same'):
-
创建第二个卷积层 (conv2),使用 64 个 5x5 的卷积核。
-
in_channels=32:输入通道数为 32,来自 conv1 的输出。
-
out_channels=64:输出通道数为 64,表示该层会生成 64 个特征图。
-
-
self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2):
-
创建第二个最大池化层 (pool2),使用 2x2 的池化窗口和步长为 2。
-
-
self.dropout2 = nn.Dropout(p=0.25):
-
创建第二个 Dropout 层 (dropout2),以 0.25 的概率随机丢弃神经元。
-
-
self.flatten = nn.Flatten():
-
创建一个 Flatten 层,将多维的特征图展平成一维向量,以便输入到全连接层。
-
-
self.fc1 = nn.Linear(64 * 7 * 7, 1000):
-
创建第一个全连接层 (fc1)。
-
in_features=64 * 7 * 7:输入特征数为 3136,来自 conv2 输出的 64 个 7x7 特征图展平后的结果。
-
out_features=1000:输出特征数为 1000。
-
-
self.dropout3 = nn.Dropout(p=0.5):
-
创建第三个 Dropout 层 (dropout3),以 0.5 的概率随机丢弃神经元。
-
-
self.fc2 = nn.Linear(1000, 10):
-
创建第二个全连接层 (fc2)。
-
in_features=1000:输入特征数为 1000,来自 fc1 的输出。
-
out_features=10:输出特征数为 10,对应 MNIST 数据集的 10 个类别。
-
def forward(self, x):
-
这是模型的前向传播方法,定义了数据在模型中的流动顺序。
-
x 是模型的输入,一个形状为 (batch_size, 1, 28, 28) 的张量,表示一个批次的 MNIST 图像。
前向传播过程:
-
x = torch.relu(self.conv1(x)):将输入 x 传递给 conv1,然后应用 ReLU 激活函数。
-
x = self.pool1(x):将 conv1 的输出传递给 pool1。
-
x = self.dropout1(x):将 pool1 的输出传递给 dropout1。
-
x = torch.relu(self.conv2(x)):将 dropout1 的输出传递给 conv2,然后应用 ReLU 激活函数。
-
x = self.pool2(x):将 conv2 的输出传递给 pool2。
-
x = self.dropout2(x):将 pool2 的输出传递给 dropout2。
-
x = self.flatten(x):将 dropout2 的输出传递给 flatten,将其展平成一维向量。
-
x = torch.relu(self.fc1(x)):将 flatten 的输出传递给 fc1,然后应用 ReLU 激活函数。
-
x = self.dropout3(x):将 fc1 的输出传递给 dropout3。
-
x = self.fc2(x):将 dropout3 的输出传递给 fc2。
-
return x:返回 fc2 的输出,这是一个形状为 (batch_size, 10) 的张量,表示每个样本属于每个类别的概率。
创建模型实例:
-
model = CNN(): 创建一个 CNN 类的实例,名为 model。
- # 定义CNN 模型
- class CNN(nn.Module):
- def __init__(self):
- super(CNN, self).__init__()
- self.conv1 = nn.Conv2d(1, 32, kernel_size=5, padding='same')
- self.pool1 = nn.MaxPool2d(kernel_size=2, stride=2)
- self.dropout1 = nn.Dropout(p=0.25)
-
- self.conv2 = nn.Conv2d(32, 64, kernel_size=5, padding='same')
- self.pool2 = nn.MaxPool2d(kernel_size=2, stride=2)
- self.dropout2 = nn.Dropout(p=0.25)
-
- self.flatten = nn.Flatten()
- self.fc1 = nn.Linear(64 * 7 * 7, 1000) # 7*7 是经过两次池化后的特征图大小
- self.dropout3 = nn.Dropout(p=0.5)
- self.fc2 = nn.Linear(1000, 10)
-
- def forward(self, x):
- x = torch.relu(self.conv1(x))
- x = self.pool1(x)
- x = self.dropout1(x)
-
- x = torch.relu(self.conv2(x))
- x = self.pool2(x)
- x = self.dropout2(x)
-
- x = self.flatten(x)
- x = torch.relu(self.fc1(x))
- x = self.dropout3(x)
- x = self.fc2(x)
- return x
-
- # 创建模型实例
- model = CNN()
注:后面的模型拟合过程使用cnn模型进行,因为我先进行了预训练模型的搭建,再通过cnn模型进行调整,而DenseNet121模型训练时间过长,没有再进行调整。这也算我的一个失误。resnet模型示例代码没有列出的原因是,在初步拟合预测中,发现其预测准确率相较于densenet模型偏低,且训练速度并没有大幅提高,所以将其忽略。但下面我也会列出其架构,你可以根据自己的想法,对模型作出调整预测。
Resnet18模型:
ResNet18 架构及解析:
输入图像 --> 7x7 卷积 (步长 2) --> 最大池化 --> 残差块组 1 (2 个残差块) --> 残差块组 2 (2 个残差块) --> 残差块组 3 (2 个残差块) --> 残差块组 4 (2 个残差块) --> 全局平均池化 --> 全连接层 --> 输出
-
初始卷积层: 一个 7x7 卷积层,步长为 2,后接一个最大池化层。
-
残差块组: 4 组残差块,每组包含 2 个残差块。 每个残差块的结构相同,但输入和输出通道数可能不同。
-
全局平均池化层: 将最后一个残差块的输出进行全局平均池化。
-
全连接层: 将全局平均池化层的输出映射到最终的类别数。
残差块结构:
+-----> 3x3 卷积 --> ReLU --> 3x3 卷积 --> +
| |
输入 -----> ----> ReLU --> 输出
| |
+------------------------> 恒等映射 ---------+
-
残差块 (Residual Block): ResNet 的核心是残差块,它包含两个 3x3 卷积层和一个恒等映射 (identity mapping)。 恒等映射是指将输入直接传递到输出,与卷积层的输出相加。 残差连接允许梯度更容易地流向较早的层,从而缓解梯度消失问题。
-
跳跃连接 (Skip Connection): 残差块中的恒等映射被称为跳跃连接,它允许网络学习输入的残差表示,而不是直接学习完整的输入特征。
-
模块化设计: ResNet 由多个重复的残差块组成,可以根据需要堆叠不同数量的残差块,形成不同深度的网络。
ResNet18 的优点:
-
解决梯度消失问题: 残差连接可以使梯度更容易地流向较早的层,从而缓解梯度消失问题,使得训练非常深的网络成为可能。
-
提高模型精度: 残差连接可以提高模型的学习能力,从而提高模型的精度。
-
模块化设计: ResNet 的模块化设计使得它可以很容易地扩展到更深的网络,例如 ResNet34、ResNet50、ResNet101 和 ResNet152。
2.优化策略
定义损失函数和优化器:
-
nn.CrossEntropyLoss() 是多类别分类任务常用的损失函数
-
optim.Adam() 是一个常用的优化算法,用于更新模型的权重
-
lr=0.001 是学习率,控制每次参数更新的步长
-
weight_decay=1e-5 是 L2 正则化系数,用于降低过拟合的风险
- # 定义损失函数和优化器
- criterion = nn.CrossEntropyLoss()
- optimizer = optim.Adam(model.parameters(), lr=0.001,weight_decay=1e-5)
定义学习率调度器:
-
lr_scheduler.ReduceLROnPlateau 是一个学习率调度器,当验证集损失不再下降时,自动降低学习率
-
'min' 表示当监控指标 (这里是验证集损失) 停止下降时,降低学习率
-
patience=2 表示允许验证集损失连续 2 个 epochs 不下降,才降低学习率
-
factor=0.5 表示每次降低学习率的倍数为 0.5
- # 定义学习率调度器
- scheduler = lr_scheduler.ReduceLROnPlateau(optimizer, 'min', patience=2, factor=0.5)
3.自定义训练和评估函数
- def train_epoch(model, dataloader, criterion, optimizer):
- model.train() # 设置模型为训练模式
- running_loss = 0.0
- correct = 0
- total = 0
-
- for i, data in enumerate(dataloader, 0):
- inputs, labels, _ = data # 获取输入数据、标签和索引
- optimizer.zero_grad() # 梯度清零
- outputs = model(inputs) # 前向传播
- loss = criterion(outputs, labels) # 计算损失
- loss.backward() # 反向传播
- optimizer.step() # 更新模型参数
- running_loss += loss.item() # 累加损失
-
- _, predicted = torch.max(outputs.data, 1) # 获取预测结果
- total += labels.size(0) # 累加样本数量
- correct += (predicted == labels[:labels.size(0)]).sum().item() # 累加正确预测数量
-
- return running_loss / len(dataloader), 100 * correct / total # 返回平均损失和准确率
-
- def evaluate(model, dataloader, criterion):
- model.eval() # 设置模型为评估模式
- val_loss = 0.0
- correct = 0
- total = 0
-
- with torch.no_grad(): # 禁用梯度计算
- for data in dataloader:
- images, labels, _ = data # 获取输入数据、标签和索引
- outputs = model(images) # 前向传播
- loss = criterion(outputs, labels) # 计算损失
- val_loss += loss.item() # 累加损失
-
- _, predicted = torch.max(outputs.data, 1) # 获取预测结果
- total += labels.size(0) # 累加样本数量
- correct += (predicted == labels[:labels.size(0)]).sum().item() # 累加正确预测数量
-
- return val_loss / len(dataloader), 100 * correct / total # 返回平均损失和准确率
4.训练过程
- # 训练模型
- epochs = 45
- best_val_acc = 0.0
- best_epoch = 0 # 记录最佳 epoch
-
- # 记录训练过程中的损失值和准确率
- train_losses = []
- val_losses = []
- train_accuracies = []
- val_accuracies = []
-
- for epoch in tqdm(range(epochs), desc="Training"):
- # 训练
- train_loss, train_acc = train_epoch(model, train_loader, criterion, optimizer)
- train_losses.append(train_loss)
- train_accuracies.append(train_acc)
-
- # 验证
- val_loss, val_acc = evaluate(model, val_loader, criterion)
- val_losses.append(val_loss)
- val_accuracies.append(val_acc)
-
- # 保存最佳模型
- if val_acc > best_val_acc:
- best_val_acc = val_acc
- best_epoch = epoch + 1 # 记录最佳 epoch
- torch.save(model.state_dict(), 'best_model.pth') # 保存最佳模型
- # 更新学习率
- scheduler.step(val_loss)
- # 打印损失值和准确率
- print(f'Epoch {epoch + 1}: Train Loss: {train_loss:.4f}, Train Acc: {train_acc:.4f}%, Val Loss: {val_loss:.4f}, Val Acc: {val_acc:.4f}%')
- print(f'Finished Training. Best Epoch: {best_epoch}')

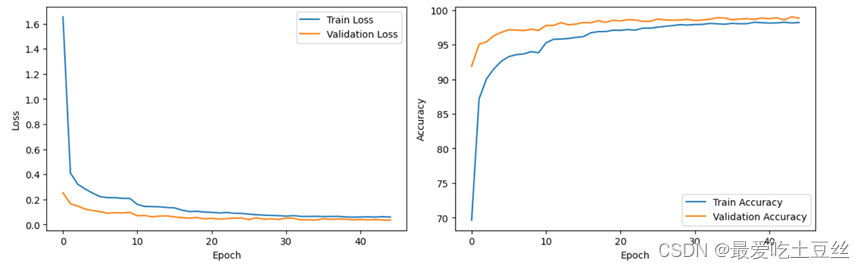
5.绘制训练曲线
你可以通过观察拟合曲线的变化来判断你的模型是否过拟合,以及调整模型结构和参数。
-
训练集和验证集的损失值变化趋势:
-
如果训练集损失持续下降,但验证集损失开始上升,则表明模型可能过拟合。
-
-
训练曲线: 绘制训练集和验证集的损失值和准确率曲线,观察它们之间的差距。
-
如果差距较大,则表明模型可能过拟合。
-
- # 绘制训练曲线
- plt.figure(figsize=(12, 4))
-
- plt.subplot(1, 2, 1)
- plt.plot(train_losses, label='Train Loss')
- plt.plot(val_losses, label='Validation Loss')
- plt.xlabel('Epoch')
- plt.ylabel('Loss')
- plt.legend()
-
- plt.subplot(1, 2, 2)
- plt.plot(train_accuracies, label='Train Accuracy')
- plt.plot(val_accuracies, label='Validation Accuracy')
- plt.xlabel('Epoch')
- plt.ylabel('Accuracy')
- plt.legend()
-
- plt.tight_layout()
- plt.show()
6.最佳模型在验证集上准确率
- model.load_state_dict(torch.load('best_model.pth'))
- model.eval()
- # 计算验证集准确率
- all_predictions = []
- all_labels = []
-
- with torch.no_grad():
- for images, labels, _ in val_loader:
- outputs = model(images)
- _, predictions = torch.max(outputs, 1)
- all_predictions.extend(predictions.cpu().numpy())
- all_labels.extend(labels.cpu().numpy())
-
- accuracy = accuracy_score(all_labels, all_predictions)
-
- print(f"Validation Accuracy: {accuracy * 100:.4f}%")
![]()
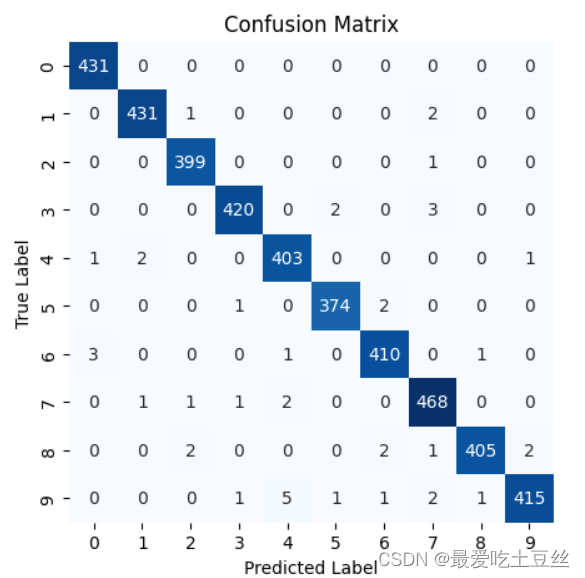
7.绘制混淆矩阵
混淆矩阵解析:
-
横轴: 表示模型预测的类别标签 (Predicted Label)。
-
纵轴: 表示样本的真实类别标签 (True Label)。
-
每个单元格中的数值: 表示该真实类别被预测为该预测类别的样本数量。
-
对角线上的数值: 表示模型正确预测的样本数量。 数值越大,说明模型在该类别上的表现越好。
-
非对角线上的数值: 表示模型错误预测的样本数量。 数值越大,说明模型在该类别上的表现越差。
例:
-
单元格 (4, 4) 的数值为 403: 表示真实类别为 4 的样本中,有 403 个被正确地预测为类别 4。
-
单元格 (9, 4) 的数值为 5: 表示真实类别为 9 的样本中,有 5 个被错误地预测为类别 4。
- # 计算混淆矩阵
- cm = confusion_matrix(all_labels, all_predictions)
- # 绘制混淆矩阵
- plt.figure(figsize=(5, 5))
- sns.heatmap(cm, annot=True, fmt="d", cmap="Blues", cbar=False,
- xticklabels=range(10), yticklabels=range(10))
- plt.xlabel("Predicted Label")
- plt.ylabel("True Label")
- plt.title("Confusion Matrix")
- plt.show()
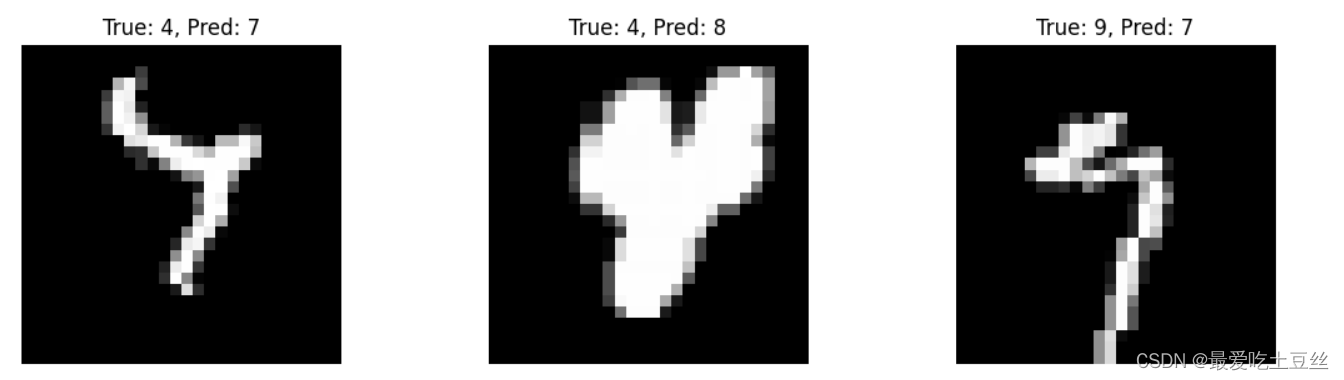
8.预测错误图像对比
通过对预测错误图像的对比,可以更直观的看出模型预测是否准确,及哪里需要改进。
如在这次预测过程中,我觉得真实标签为9的手写数字图像并不应该被预测错误,那我就需要判断是什么导致了预测错误,并进行改进。
- # 查找预测错误的样本
- incorrect_images = []
- incorrect_labels = []
- predicted_labels = []
-
- with torch.no_grad():
- for images, labels, indices in val_loader:
- outputs = model(images)
- _, preds = torch.max(outputs, 1)
- for i in range(len(preds)):
- if preds[i] != labels[i]:
- incorrect_images.append(images[i])
- incorrect_labels.append(labels[i])
- predicted_labels.append(preds[i])
-
- # 展示部分预测错误的样本
- num_samples = 6 # 展示的样本数量
- fig, axes = plt.subplots(nrows=2, ncols=num_samples // 2, figsize=(12, 6))
- axes = axes.flatten()
-
- for i in range(num_samples):
- ax = axes[i]
- img = incorrect_images[i].cpu().numpy().transpose(1, 2, 0) * 0.5 + 0.5
- ax.imshow(img, cmap='gray')
- ax.set_title(f"True: {incorrect_labels[i]}, Pred: {predicted_labels[i]}")
- ax.axis('off')
-
- plt.tight_layout()
- plt.show()
9.正式验证提交
- # 预测测试集
- predictions = []
- with torch.no_grad():
- for data in test_loader:
- images = data
- outputs = model(images)
- _, predicted = torch.max(outputs.data, 1)
- predictions.extend(predicted.numpy())
-
- # 保存预测结果
- submission = pd.DataFrame({'ImageId': range(1, len(test_images) + 1), 'Label': predictions})
- submission.to_csv('submission.csv', index=False)
总结:
最终的得分在99.6%(前6%)左右,在该项目中,因为MNIST 数据集图像并不复杂,数据量也并不算很多,所以推荐先使用简单的cnn模型进行训练,直到达到瓶颈再根据你的诉求进行进一步调整。本篇文章参考了很多kaggle中前辈的经验,在这里列出一些文章,还有一些没有找到,你可以根据原文进行学习。


