
热门标签
热门文章
- 12021-3-03MyBatis框架学习笔记01:MyBatis入门_mybatis freesql
- 2MapReduce 模式、算法和用例
- 3(01)Unity使用在线AI大模型(使用百度千帆服务)
- 4python报表自动化系列 - 计算某年某个月的天数_python计算某年某月共有几天的程序
- 5LDR6020-VR串流线:开启虚拟现实新纪元的钥匙
- 6MongoDB教程六(文档操作)_mongo 命令执行 函数
- 7【UnityShader入门精要】从简单的shader编写到基础光照_unity怎么写shader
- 8win10 或者 win11 提示需要使用新应用以打开此 WindowsDefender 链接
- 9k8s1.19使用ceph15 rbd块存储_rbd watch
- 10深度学习之轻量化神经网络MobileNet
当前位置: article > 正文
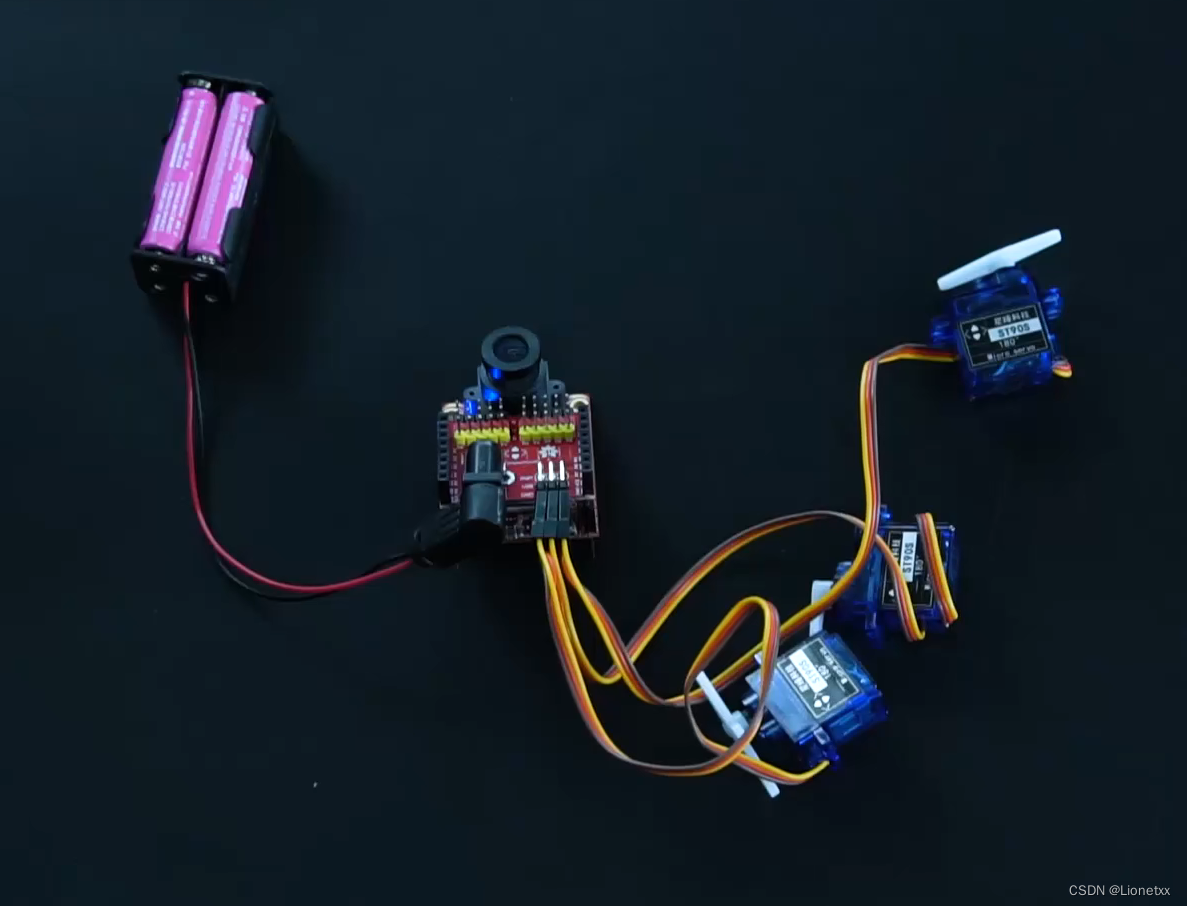
OpenMV:25传感器扩展板控制三个舵机_openmv4 plus有几个舵机
作者:人工智能uu | 2024-07-14 17:26:19
赞
踩
openmv4 plus有几个舵机
今天讲解一下如何使用OpenMV本身来控制三个舵机(借助传感器扩展板)
对于OpenMV或OpenMV4而言,我们可以使用P7P8P9三个PWM引脚来通过PWM来实现对舵机的控制,对于OpenMV2而言,只能使用P7或P8来实现两个舵机的控制,
我们可以通过控制PWM的占空比来控制舵机的速度,或是直接控制舵机转动到某个角度,如sevor.angle(90)控制舵机转到90°的位置
关于舵机的供电,我们推荐使用四节1.2V的镍氢电池(每节电池电压为1.2V)
单个舵机转动
# 从pyb导入Servo
from pyb import Servo
s1 = Servo(1) # 设置s1=Servo(1)来控制第1个舵机(P7)
while(1):
s1.angle(45) # 让第 1 个舵机转动到45°的位置
# 设置延迟
time.- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/人工智能uu/article/detail/825733
推荐阅读
相关标签

