
热门标签
热门文章
- 1Java项目:超市便利店综合管理系统_超市管理系统java
- 2Appium+python自动化2-环境搭建(下)
- 3VS2010 mvc3.0学习入门原理 精华篇_vs2010 mvc 3
- 4RAG 案框架(Qanything、RAGFlow、FastGPT、智谱RAG)对比_rag框架 fastgpt、langchain 测评
- 5c++设计模式之概括--构造型模式_c++构造型
- 6深度揭秘:淘宝客返利系统自动赚佣金的原理与实现方法_淘宝返利的技术原理
- 7CSS之宽高自适应、BFC_默认情况下什么元素设置宽高可以生效
- 8(2)图像识别yolov5—识别图片视频等文件_yolov5图片识别
- 9ajax请求数据包括数组,后台获取不到数据_c# ajax 接受的json只有数组数量没有值
- 10【java多线程编程】三种多线程的实现方式_java多线程以哪三种方式实现
当前位置: article > 正文
Matlab:线性规划_linprog(f,a,b)
作者:Guff_9hys | 2024-07-18 07:18:12
赞
踩
linprog(f,a,b)
注:
![]()
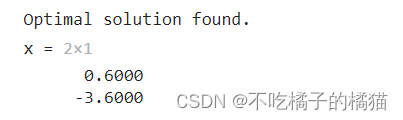
1、x = linprog(f,A,b) ;求解 min f'*x,满足 A*x ≤ b;
例:
- A=[1,2;2,-1/2;-1,-1];
- b=[6,3,3];
- f=[0,1];
- x=linprog(f,A,b)
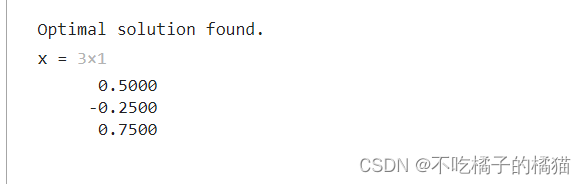
2、x = linprog(f,A,b,Aeq,beq) ;包括等式约束 Aeq*x = beq。如果不存在不等式,设置 A = [] 和 b = [];
例:
- A=[1,1,0;0,1,1;1,1,-1];
- b=[1/4,1/2,1/3];
- Aeq=[1,1,1];
- beq=1;
- f=[0,-1,1];
- x=linprog(f,A,b,Aeq,beq)
3、x = linprog(f,A,b,Aeq,beq,lb,ub) ;定义变量 x 的一组下界和上界,使解始终在 lb ≤ x ≤ ub 范围内。如果不存在等式,设置 Aeq = [] 和 beq = []。
例:
- A=[1,1,1;1,4,0;0,3,-1];
- b=[2,4,3];
- f=[0,-1,1];
- lb=[-2,-1,-3];
- ub=[5,4,4];
- x=linprog(f,A,b,[],[],lb,ub)

4、[x,fval] = linprog(f,A,b);求解问题并返回函数值。
options = optimoptions('linprog','Algorithm','dual-simplex');设置选项以使用 'dual-simplex' 算法。
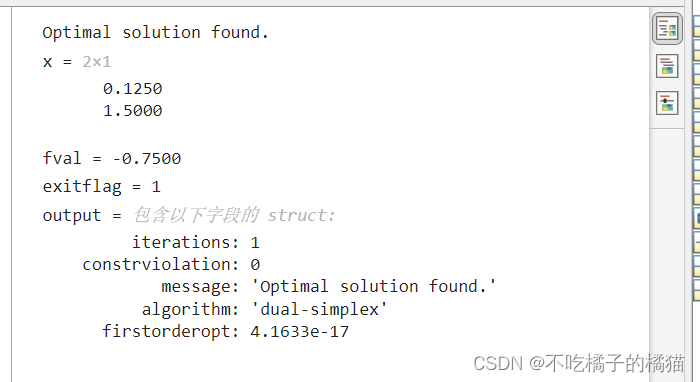
[x,fval,exitflag,output] = linprog(f,A,b,Aeq,beq,lb,ub,options);求解线性规划并请求返回函数值、退出标志和输出结构体。
注:
(1)exitflag = 1 表示解可靠;
(2)output.iterations = 0 表示 linprog 在预求解过程中即找到解,根本不必进行迭代。
例:
- A=[1,1;1,0.25;1,-1;-0.25,-1;-1,-1;-1,1];
- b=[2,1,2,1,-1,2];
- Aeq=[1 0.25];
- beq=0.5;
- lb=[-1.5,-1];
- ub=[1.75,1.5];
- f=[-1.2 -0.4];
- options=optimoptions('linprog','Algorithm','dual-simplex');
- [x,fval,exitflag,output]=linprog(f,A,b,Aeq,beq,lb,ub,options)
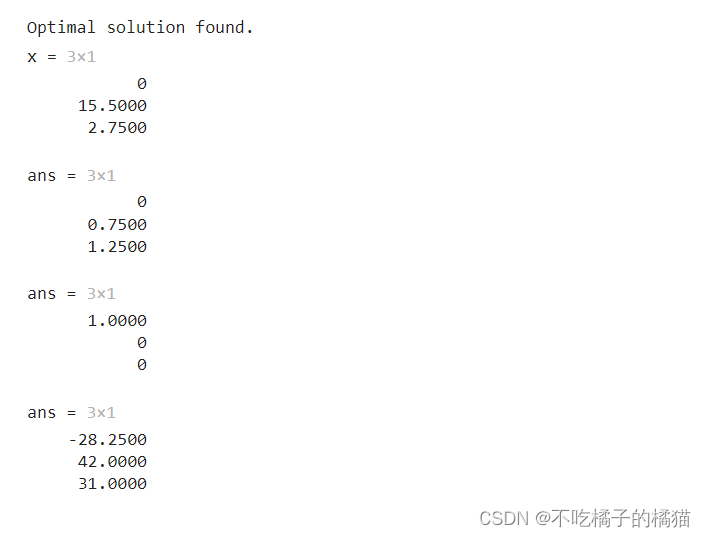
5、拉格朗日乘数
例:
- f=[-5;-4;-3];
- A=[1,-2,1;3,2,4;3,2,0];
- b=[20;42;31];
- lb = zeros(3,1); %把三个变量均约束为正值
- Aeq=[];
- beq=[]; %没有线性等式约束
- [x,fval,exitflag,output,lambda] = linprog(f,A,b,Aeq,beq,lb); %调用linprog,获取拉格朗日乘数
- x,lambda.ineqlin,lambda.lower %检查解和拉格朗日乘数
- A*x %检查这是否属实
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/Guff_9hys/article/detail/844219
推荐阅读
相关标签

