
- 1开源C语言库Melon:数据恢复算法
- 2Unity3D之发布到IOS,Android的各种坑_unity admob销毁了但是没关掉
- 32024-01-18(SpringCloud)
- 4《Django开发从入门到实践》学习笔记
- 5外星人入侵游戏-(创新版)
- 6【无人机组装与调试】第四章 F450四轴装机实例-选择机型、需要的器材工具材料_f450组装与调试实训报告
- 7【AI绘画--七夕篇】使用Stable Diffusion的艺术二维码完全生成攻略
- 8【Python】安装包的时候提示缺少Microsoft Visual C++ 14.0的解决方案
- 9decapoda-research/llama-7b-hf 的踩坑记录_decapoda-research/llama-7b-hf is not a local folde
- 10C++---练习_void showshape
Ubuntu18.04 Realsense D435i驱动安装与配置_源码安装udevadm
赞
踩
InterRealSenseD435i SDK安装
一、 命令行的安装方式安装
1.注册服务器的公钥:
打开终端输入
sudo apt-key adv --keyserver keys.gnupg.net --recv-key C8B3A55A6F3EFCDE || sudo apt-key adv --keyserver hkp://keyserver.ubuntu.com:80 --recv-key C8B3A55A6F3EFCDE2.将服务器添加到存储库列表中:
在终端里输入
sudo add-apt-repository "deb https://librealsense.intel.com/Debian/apt-repo $(lsb_release -cs) main" -u3.安装库:
在终端里输入
- sudo apt-get install librealsense2-dkms
- sudo apt-get install librealsense2-utils
4.安装开发者和调试包:
在终端里输入
- sudo apt-get install librealsense2-dev
- sudo apt-get install librealsense2-dbg
使用这两条命令的时候会非常的慢。可能是网络的问题
5.测试SDK2
把相机与电脑上的USB3.0口相连后(不是USB3.0口可能会出问题),打开终端输入
realsense-viewer二、 使用源码编译的方法
手动下载地址:
github:https://github.com/IntelRealSense/librealsense
1. 下载source
- git clone https://github.com/IntelRealSense/librealsense
- cd librealsense
2. 安装依赖项
- sudo apt-get install libudev-dev pkg-config libgtk-3-dev
- sudo apt-get install libusb-1.0-0-dev pkg-config
- sudo apt-get install libglfw3-dev
- sudo apt-get install libssl-dev
3. 安装权限脚本
- sudo cp config/99-realsense-libusb.rules /etc/udev/rules.d/
- sudo udevadm control --reload-rules && udevadm trigger
4. 编译安装
- mkdir build
- cd build
- cmake ../ -DBUILD_EXAMPLES=true
- make
- sudo make install
5. 测试
进入librealsense/build/examples/capture,测试效果:
./rs-capture 或直接使用realsense-viewer工具查看效果:
realsense-viewer原文链接:https://blog.csdn.net/YOULANSHENGMENG/article/details/125334427
realsense-ros安装
创建ros工作空间
mkdir -p ~/realsense_ws/src && cd ~/realsense_ws/src下载源码并检查依赖
- git clone -b 2.2.7 https://github.com/IntelRealSense/realsense-ros.git
- sudo apt-get install ros-kinetic-ddynamic-reconfigure
编译
- cd ~/realsense_ws
- catkin_make -DCATKIN_ENABLE_TESTING=False -DCMAKE_BUILD_TYPE=Release
出现错误
error: ‘find_if’ was not declared in this scope
texture_frame_itr = find_if(frameset.begin(), frameset.end(), [&texture_source_id, &available_formats] (rs2::frame f)
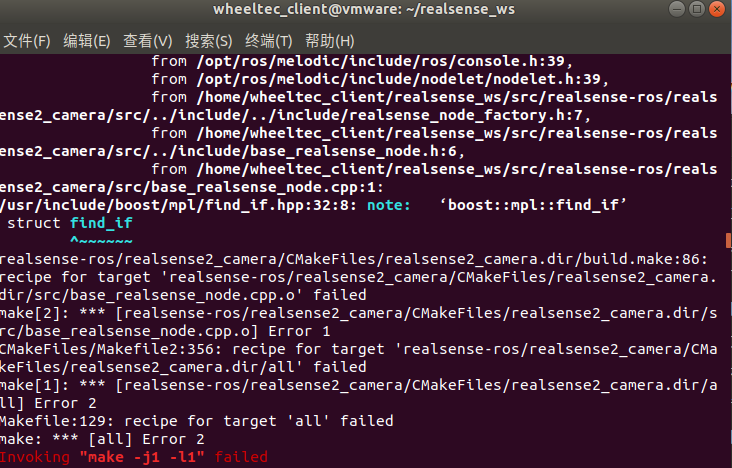
执行以下命令
cd realsense_ws/src/realsense-ros/realsense2_camera/srcCtal+F键查找,在所有的find_if前面加上std::
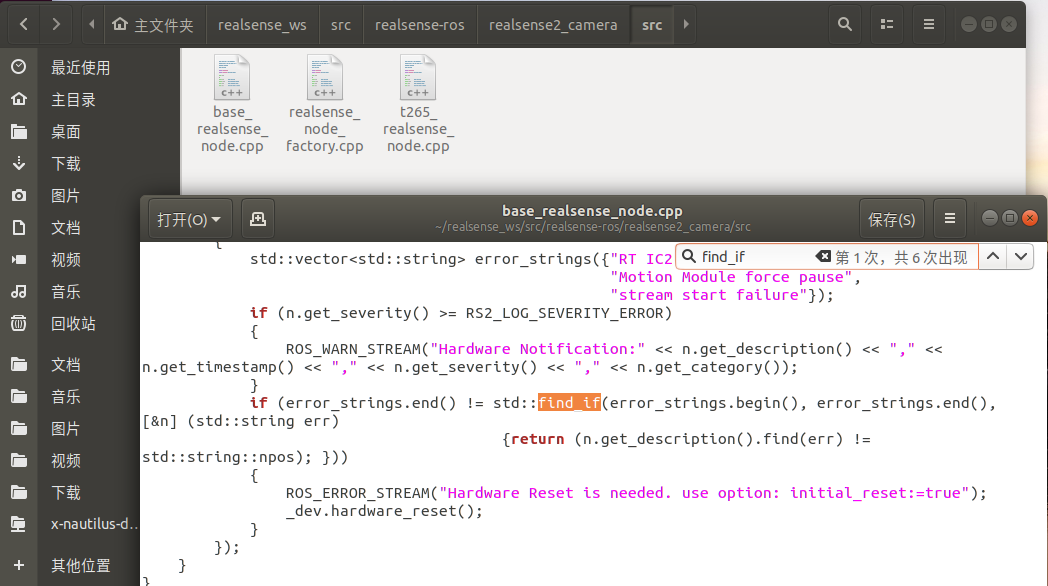
修改完后返回realsense_ws再执行上面的指令
- catkin_make install
- echo "source ~/realsense_ws/devel/setup.bash" >> ~/.bashrc
- source ~/.bashrc
测试
roslaunch realsense2_camera rs_camera.launch正常执行后,可以使用ros话题查看
rostopic list会发现没有imu的话题。
打开rs_camera.launch进行下面的处理进行更改
<arg name="enable_gyro" default="true"/>
<arg name="enable_accel" default="true"/>
<arg name="unite_imu_method" default="linear_interpolation"/>
<arg name="enable_sync" default="true"/>
更改后执行命令
- roslaunch realsense2_camera rs_camera.launch
- rostopic list
展现的话题中出现imu相关的话题

原文链接:https://blog.csdn.net/YOULANSHENGMENG/article/details/125334427
原文链接:https://blog.csdn.net/qq_42037180/article/details/109163699

