
热门标签
热门文章
- 1探秘亚马逊云科技海外服务器 | 解析跨境云计算的前沿技术与应用
- 2Leetcode Solutions - Part 2_let x1, x2 are solutions to (at a + 碌ii)x = 鈭扐t r,
- 3dubbo源码分析第十六篇一dubbo集群容错策略-BroadcastCluster广播_dubbo broadcast cluster
- 4简单易懂深入PyTorch中RNN、LSTM和GRU使用和理解
- 5《成为一名优秀的架构师:从基础到实践》_现代c++软件架构:方法与实践 pdf
- 6(附源码)基于Java SpringBoot的电影院管理系统设计与实现 毕业设计 011633_电影管理系统java源码
- 7黑马程序员——Objective-C——定义类、方法、创建对象
- 8HTML小游戏13 —— 仿《神庙逃亡》3D风格跑酷游戏《墓地逃亡》(附完整源码)_html神庙逃亡制作代码
- 9chatgpt赋能python:Python量化交易:为什么Python是最好的选择_pyalgotrade optimizer cuda
- 10二战华为成功上岸,准备了小半年,要个27k应该也算不上很高吧~
当前位置: article > 正文
树莓派控制无人机实现定点降落(五)——设计地标以及gazebo导入模型方法_gazebo二维码模型
作者:机器笔尖舞者 | 2024-02-04 18:13:58
赞
踩
gazebo二维码模型
树莓派控制无人机实现定点降落(五)——设计地标以及gazebo导入模型方法
1、将地标图像导入gazebo中的方法:
在~/.gazebo/model下,创建如下结构的文件
land_mark
model.sdf 文件
model.config 文件
materials 文件夹
| --scripts 文件夹
land_mark.material 纹理信息
| --textures 文件夹
h.png 地标图像
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
各文件的文件格式在我的另一篇博文里有链接在此
在这里,各文件内容如下:
model.sdf文件
<?xml version='1.0'?> <sdf version='1.4'> <model name="land_mark"> <link name='link'> <pose>0 0 0.115 0 0 0</pose> <inertial> <mass>0.390</mass> <inertia> <ixx>0.00058</ixx> <ixy>0</ixy> <ixz>0</ixz> <iyy>0.00058</iyy> <iyz>0</iyz> <izz>0.00019</izz> </inertia> </inertial> <collision name='collision'> <geometry> <box> <size>.496 .496 .01</size> </box> </geometry> </collision> <visual name='visual'> <geometry> <box> <size>.496 .496 .01</size> </box> </geometry> <material> <script> <uri>model://land_mark/materials/scripts</uri> <uri>model://land_mark/materials/textures</uri> <name>Mark/Diffuse</name> </script> </material> </visual> </link> </model>

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
文件model.config
<?xml version="1.0"?>
<model>
<name>land_mark</name>
<version>1.0</version>
<sdf version="1.4">model.sdf</sdf>
<author>
<name>chow</name>
</author>
<description>
Landing Mark
</description>
</model>
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
其中<name>land_mark</name>即为之后在gazebo里的模型名称
文件land_mark.material
material Mark/Diffuse
{
receive_shadows off
technique
{
pass
{
texture_unit
{
texture ../textures/h.png
}
}
}
}
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
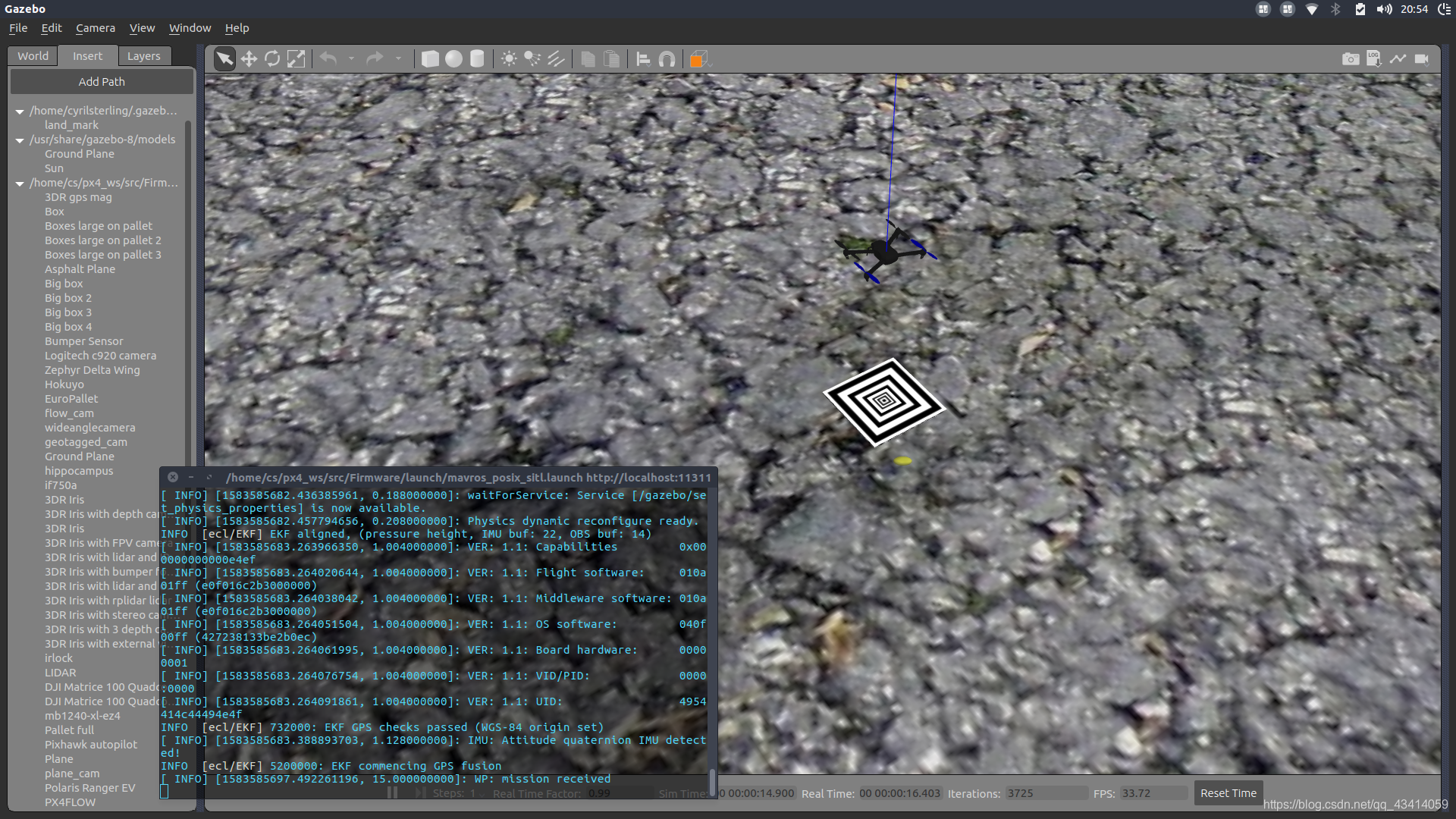
之后在gazebo中insert模型即可,如下:
2、对于地标设计
我一开始准备使用二维码定位,后来觉得树莓派运行能力不足,所以使用了自己设计的地标,下面先介绍二维码定位的方法。
1、下载ar-track-alvar
sudo apt-get install ros-kinetic-ar-track-alvar
- 1
该包可以用于二维码定位
2、获得二维码
rosrun ar_track_alvar createMarker [number]
- 1
将[number]替换成你要的数字,图片就会在当前路径下生成。
3、创建gazebo二维码模型,使用上述方法。
4、ar_track_alvar下有很多功能包(官网链接)包括findMakerBundles,findMakerBundlesNoKinect,trainMakerBundle,createMarker(可以在/opt/ros/kinetic/lib/ar_track_alvar下找到)我们用到的二维码识别与定位的是individualMakersNoKinect,注意不要用成individualMakers,后者是默认摄像头为kinect,它读取图片的格式为点云。
3、改进地标
放弃上述方案后我使用的地标参照另一个人的博文链接在此
通过将它的方法改进,把矩形框设计成不均匀的,得到如下所示地标图像:
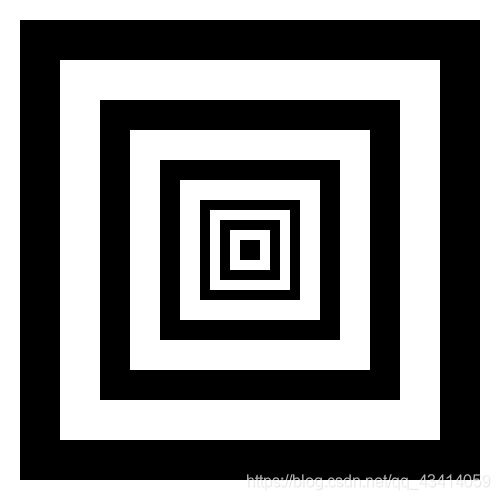
这样在降落过程中可以不停地进行矫正,如果使用二维码定位则只要拍不全就难以捕捉地标信息。
接下来就是识别地标和控制了,识别控制算法我将在下一篇博文里介绍。
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/59557
推荐阅读
相关标签

