
热门标签
热门文章
- 1py实战项目进度甘特图绘制_python 甘特图 多个进度
- 2区块链产业研究:物联网+区块链的应用落地_区块链 物联网 落地
- 3Docker 教程_启动docker
- 4【Kubernetes 企业项目实战】06、基于 Jenkins+K8s 构建 DevOps 自动化运维管理平台(中)_devops自动化运维平台
- 5DP-状态压缩DP(解释+典例)
- 6STM32+esp8266实现单片机与服务器的WiFi通信_基于stm32、esp8266及ov7670的无线图传下位机源码
- 7C语言实现面向对象编程 | 干货_c语言对象编程
- 8高效的Http客户端 OkHttp3使用_okhttp3 form 文件二进制
- 9tomcat最大线程数、最大等待数和最大连接数
- 10认识SOAR-安全事件编排自动化响应
当前位置: article > 正文
onnxruntime和tensorrt多batch推理_onnx多batch推理
作者:pgrmghi | 2024-02-03 18:54:52
赞
踩
onnx多batch推理
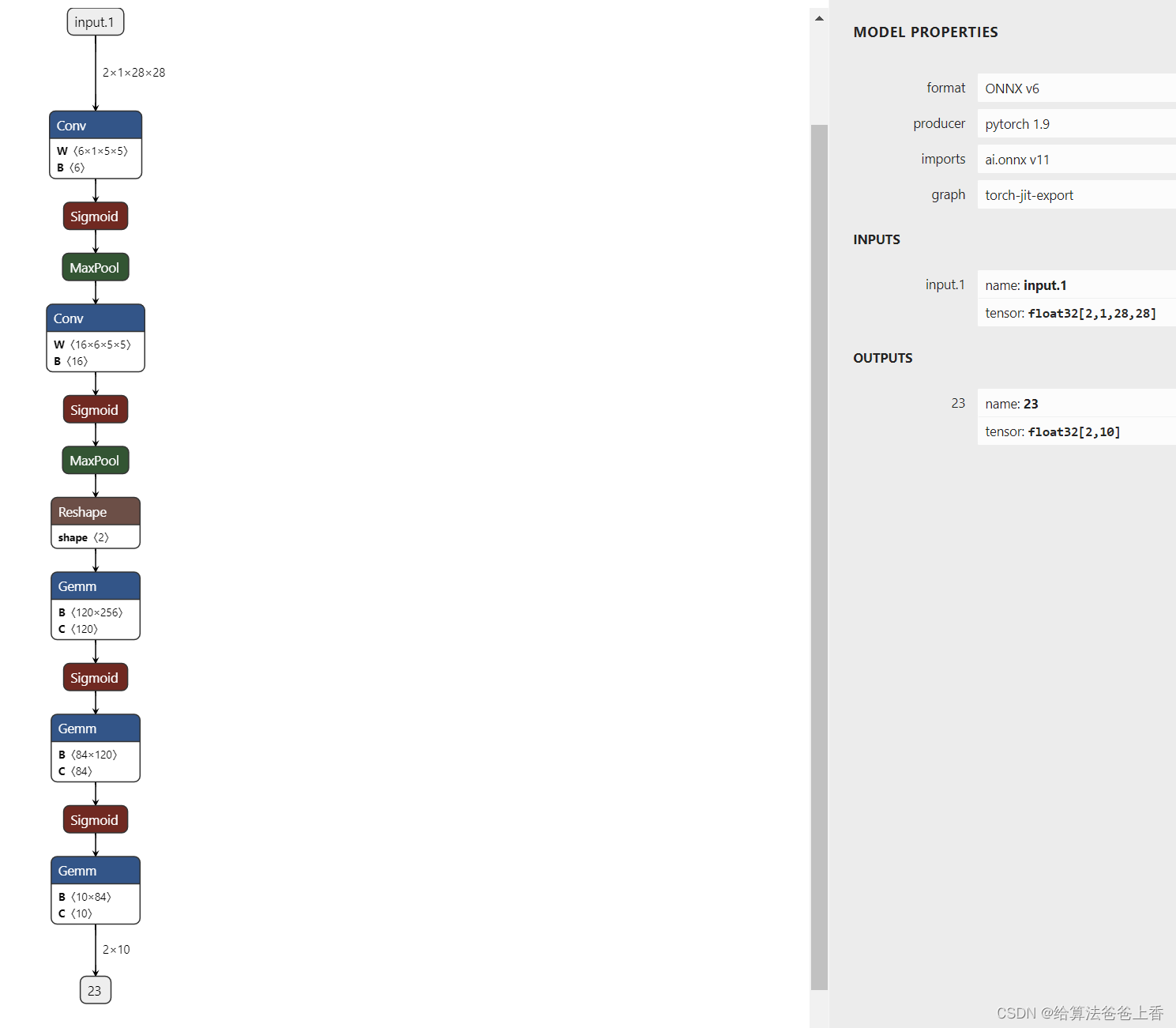
以lenet网络为例。
onnxruntime多batch推理
当batch size为2时,导出如下结构的onnx文件:
python推理:
import cv2 import numpy as np import onnxruntime img0 = cv2.imread("2.png", 0) img1 = cv2.imread("10.png", 0) blob0 = cv2.dnn.blobFromImage(img0, 1/255., size=(28,28), swapRB=True, crop=False) blob1 = cv2.dnn.blobFromImage(img1, 1/255., size=(28,28), swapRB=True, crop=False) onnx_session = onnxruntime.InferenceSession("lenet.onnx", providers=['CPUExecutionProvider']) input_name = [] for node in onnx_session.get_inputs(): input_name.append(node.name) output_name = [] for node in onnx_session.get_outputs(): output_name.append(node.name) inputs = {} for name in input_name: inputs[name] = np.concatenate((blob0, blob1), axis=0) outputs = onnx_session.run(None, inputs)[0] print(np.argmax(outputs, axis=1))

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
C++推理:
#include <iostream> #include <opencv2/opencv.hpp> #include <onnxruntime_cxx_api.h> int main(int argc, char* argv[]) { Ort::Env env(ORT_LOGGING_LEVEL_WARNING, "lenet"); Ort::SessionOptions session_options; session_options.SetIntraOpNumThreads(1); session_options.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_EXTENDED); const wchar_t* model_path = L"lenet.onnx"; Ort::Session session(env, model_path, session_options); Ort::AllocatorWithDefaultOptions allocator; std::vector<const char*> input_node_names; for (size_t i = 0; i < session.GetInputCount(); i++) { input_node_names.push_back(session.GetInputName(i, allocator)); } std::vector<const char*> output_node_names; for (size_t i = 0; i < session.GetOutputCount(); i++) { output_node_names.push_back(session.GetOutputName(i, allocator)); } const size_t input_tensor_size = 2 * 1 * 28 * 28; std::vector<float> input_tensor_values(input_tensor_size); cv::Mat image0 = cv::imread("2.png", 0); cv::Mat image1 = cv::imread("10.png", 0); image0.convertTo(image0, CV_32F, 1.0 / 255); image1.convertTo(image1, CV_32F, 1.0 / 255); for (int i = 0; i < 28; i++) { for (int j = 0; j < 28; j++) { input_tensor_values[i * 28 + j] = image0.at<float>(i, j); input_tensor_values[28 * 28 + i * 28 + j] = image1.at<float>(i, j); } } std::vector<int64_t> input_node_dims = { 2, 1, 28, 28 }; auto memory_info = Ort::MemoryInfo::CreateCpu(OrtArenaAllocator, OrtMemTypeDefault); Ort::Value input_tensor = Ort::Value::CreateTensor<float>(memory_info, input_tensor_values.data(), input_tensor_size, input_node_dims.data(), input_node_dims.size()); std::vector<Ort::Value> inputs; inputs.push_back(std::move(input_tensor)); std::vector<Ort::Value> outputs = session.Run(Ort::RunOptions{ nullptr }, input_node_names.data(), inputs.data(), input_node_names.size(), output_node_names.data(), output_node_names.size()); const float* rawOutput = outputs[0].GetTensorData<float>(); std::vector<int64_t> outputShape = outputs[0].GetTensorTypeAndShapeInfo().GetShape(); size_t count = outputs[0].GetTensorTypeAndShapeInfo().GetElementCount(); std::vector<float> preds(rawOutput, rawOutput + count); int predict_label0 = std::max_element(preds.begin(), preds.begin() + 10) - preds.begin(); int predict_label1 = std::max_element(preds.begin() + 10, preds.begin() + 20) - preds.begin() - 10; std::cout << predict_label0 << std::endl; std::cout << predict_label1 << std::endl; return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
tensorrt多batch推理
python推理:
import cv2 import numpy as np import tensorrt as trt import pycuda.autoinit #负责数据初始化,内存管理,销毁等 import pycuda.driver as cuda #GPU CPU之间的数据传输 # 创建logger:日志记录器 logger = trt.Logger(trt.Logger.WARNING) # 创建runtime并反序列化生成engine with open("lenet.engine", "rb") as f, trt.Runtime(logger) as runtime: engine = runtime.deserialize_cuda_engine(f.read()) context = engine.create_execution_context() # 分配CPU锁页内存和GPU显存 h_input = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(0)), dtype=np.float32) h_output = cuda.pagelocked_empty(trt.volume(context.get_binding_shape(1)), dtype=np.float32) d_input = cuda.mem_alloc(h_input.nbytes) d_output = cuda.mem_alloc(h_output.nbytes) # 创建cuda流 stream = cuda.Stream() #加载图片 img0 = cv2.imread("2.png", 0) img1 = cv2.imread("10.png", 0) blob0 = cv2.dnn.blobFromImage(img0, 1/255., size=(28,28), swapRB=True, crop=False) blob1 = cv2.dnn.blobFromImage(img1, 1/255., size=(28,28), swapRB=True, crop=False) np.copyto(h_input, np.concatenate((blob0, blob1), axis=0).ravel()) # 创建context并进行推理 with engine.create_execution_context() as context: # Transfer input data to the GPU. cuda.memcpy_htod_async(d_input, h_input, stream) # Run inference. context.execute_async_v2(bindings=[int(d_input), int(d_output)], stream_handle=stream.handle) # Transfer predictions back from the GPU. cuda.memcpy_dtoh_async(h_output, d_output, stream) # Synchronize the stream stream.synchronize() # Return the host output. 该数据等同于原始模型的输出数据 pred = np.argmax(h_output.reshape(2, 10), axis=1) print(pred)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
C++推理:
// tensorRT include #include <NvInfer.h> #include <NvInferRuntime.h> #include <NvOnnxParser.h> // onnx解析器的头文件 // cuda include #include <cuda_runtime.h> #include <opencv2/opencv.hpp> // system include #include <stdio.h> #include <fstream> inline const char* severity_string(nvinfer1::ILogger::Severity t) { switch (t) { case nvinfer1::ILogger::Severity::kINTERNAL_ERROR: return "internal_error"; case nvinfer1::ILogger::Severity::kERROR: return "error"; case nvinfer1::ILogger::Severity::kWARNING: return "warning"; case nvinfer1::ILogger::Severity::kINFO: return "info"; case nvinfer1::ILogger::Severity::kVERBOSE: return "verbose"; default: return "unknow"; } } class TRTLogger : public nvinfer1::ILogger { public: virtual void log(Severity severity, nvinfer1::AsciiChar const* msg) noexcept override { if (severity <= Severity::kINFO) { if (severity == Severity::kWARNING) printf("\033[33m%s: %s\033[0m\n", severity_string(severity), msg); else if (severity <= Severity::kERROR) printf("\033[31m%s: %s\033[0m\n", severity_string(severity), msg); else printf("%s: %s\n", severity_string(severity), msg); } } } logger; std::vector<unsigned char> load_file(const std::string & file) { std::ifstream in(file, std::ios::in | std::ios::binary); if (!in.is_open()) return {}; in.seekg(0, std::ios::end); size_t length = in.tellg(); std::vector<uint8_t> data; if (length > 0) { in.seekg(0, std::ios::beg); data.resize(length); in.read((char*)& data[0], length); } in.close(); return data; } void inference() { // ------------------------------ 1. 准备模型并加载 ---------------------------- TRTLogger logger; auto engine_data = load_file("lenet.engine"); // 执行推理前,需要创建一个推理的runtime接口实例。与builer一样,runtime需要logger: nvinfer1::IRuntime* runtime = nvinfer1::createInferRuntime(logger); // 将模型从读取到engine_data中,则可以对其进行反序列化以获得engine nvinfer1::ICudaEngine* engine = runtime->deserializeCudaEngine(engine_data.data(), engine_data.size()); if (engine == nullptr) { printf("Deserialize cuda engine failed.\n"); runtime->destroy(); return; } nvinfer1::IExecutionContext* execution_context = engine->createExecutionContext(); cudaStream_t stream = nullptr; // 创建CUDA流,以确定这个batch的推理是独立的 cudaStreamCreate(&stream); // ------------------------------ 2. 准备好要推理的数据并搬运到GPU ---------------------------- int input_numel = 2 * 1 * 28 * 28; float* input_data_host = nullptr; cudaMallocHost(&input_data_host, input_numel * sizeof(float)); cv::Mat image0 = cv::imread("2.png", 0); image0.convertTo(image0, CV_32FC1, 1.0f / 255.0f); float* pimage = (float*)image0.data; for (int i = 0; i < 28 * 28; i++) { input_data_host[i] = pimage[i]; } cv::Mat image1 = cv::imread("10.png", 0); image1.convertTo(image1, CV_32FC1, 1.0f / 255.0f); pimage = (float*)image1.data; for (int i = 0; i < 28 * 28; i++) { input_data_host[28 * 28 + i] = pimage[i]; } float* input_data_device = nullptr; float output_data_host[20]; float* output_data_device = nullptr; cudaMalloc(&input_data_device, input_numel * sizeof(float)); cudaMalloc(&output_data_device, sizeof(output_data_host)); cudaMemcpyAsync(input_data_device, input_data_host, input_numel * sizeof(float), cudaMemcpyHostToDevice, stream); // 用一个指针数组指定input和output在gpu中的指针 float* bindings[] = { input_data_device, output_data_device }; // ------------------------------ 3. 推理并将结果搬运回CPU ---------------------------- bool success = execution_context->enqueueV2((void**)bindings, stream, nullptr); cudaMemcpyAsync(output_data_host, output_data_device, sizeof(output_data_host), cudaMemcpyDeviceToHost, stream); cudaStreamSynchronize(stream); int predict_label0 = std::max_element(output_data_host, output_data_host + 10) - output_data_host; int predict_label1 = std::max_element(output_data_host + 10, output_data_host + 20) - output_data_host - 10; std::cout << predict_label0 << std::endl; std::cout << predict_label1 << std::endl; // ------------------------------ 4. 释放内存 ---------------------------- cudaStreamDestroy(stream); execution_context->destroy(); engine->destroy(); runtime->destroy(); } int main() { inference(); return 0; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/57685
推荐阅读
相关标签

