
热门标签
热门文章
- 1Simulink|光伏阵列模拟多类故障(开路/短路/阴影遮挡/老化)
- 2漏洞复现----5、Apache Solr远程命令执行漏洞(CVE-2019-0193)_solr漏洞利用
- 3从Java小白到收获BAT等offer,分享我这两年的经验和感悟_ssm登陆
- 4Docker安装部署(详细版)
- 5Leetcode 21. 合并两个有序链表
- 6PyTorch的ONNX结合MNIST手写数字数据集的应用(.pth和.onnx的转换与onnx运行时)_invalid_argument : invalid feed input name:input
- 7RuntimeError: element 0 of tensors does not require grad and does not have a grad_fn
- 8【itest 考试系统】线上考试,解决 鼠标选择 复制粘贴 右键菜单等限制_itest复制粘贴
- 9vscode配置C/C++笔记(硬要使用C++11)_vscode应输入声明
- 102022年平均工资揭晓!2022年IT行业平均工资超高!最赚钱的行业是......IT! 看看最赚钱的职位是什么?_2022 it各城市薪资
当前位置: article > 正文
yolov8 实例分割 onnx runtime C++部署_opencv onnxruntime yolov8
作者:编程挑战者 | 2024-01-29 22:42:39
赞
踩
opencv onnxruntime yolov8
如果第一次部署分割,建议先看这篇博客:
YOLOv5 实例分割 用 OPenCV DNN C++ 部署_爱钓鱼的歪猴的博客-CSDN博客
目录
Pre
一定要知道,yolov8的输出与Yolov5 7.0 实例分割的输出不一样,
output0: float32[1,116,8400]。 116是4个box坐标信息+80个类别概率+32个mask系数
output1: float32[1,32,160,160]。一张图片一组mask原型。这个mask原型是相对于整个图像的。

一、OpenCV DNN C++ 部署
所以output0需要装置一下,117->116,其他的与yolov5实例分割没啥区别:
- net.setInput(blob);
- std::vector<cv::Mat> net_output_img;
- vector<string> output_layer_names{ "output0","output1" };
- net.forward(net_output_img, output_layer_names); //get outputs
- std::vector<int> class_ids;// res-class_id
- std::vector<float> confidences;// res-conf
- std::vector<cv::Rect> boxes;// res-box
- std::vector<vector<float>> picked_proposals; //output0[:,:, 4 + _className.size():net_width]===> for mask
- int net_width = _className.size() + 4 + _segChannels;
-
- //转置
- Mat output0=Mat( Size(net_output_img[0].size[2], net_output_img[0].size[1]), CV_32F, (float*)net_output_img[0].data).t(); //[bs,116,8400]=>[bs,8400,116]
-
- int rows = output0.rows;
- float* pdata = (float*)output0.data;
- for (int r = 0; r < rows; ++r) {
- cv::Mat scores(1, _className.size(), CV_32FC1, pdata + 4);
- Point classIdPoint;
- double max_class_socre;
- minMaxLoc(scores, 0, &max_class_socre, 0, &classIdPoint);
- max_class_socre = (float)max_class_socre;
- if (max_class_socre >= _classThreshold) {
- vector<float> temp_proto(pdata + 4 + _className.size(), pdata + net_width);
- picked_proposals.push_back(temp_proto);
- //rect [x,y,w,h]
- float x = (pdata[0] - params[2]) / params[0];
- float y = (pdata[1] - params[3]) / params[1];
- float w = pdata[2] / params[0];
- float h = pdata[3] / params[1];
- int left = MAX(int(x - 0.5 * w + 0.5), 0);
- int top = MAX(int(y - 0.5 * h + 0.5), 0);
- class_ids.push_back(classIdPoint.x);
- confidences.push_back(max_class_socre);
- boxes.push_back(Rect(left, top, int(w + 0.5), int(h + 0.5)));
- }
- pdata += net_width;//next line
- }
- //NMS
- vector<int> nms_result;
- NMSBoxes(boxes, confidences, _classThreshold, _nmsThreshold, nms_result);
- std::vector<vector<float>> temp_mask_proposals;
- Rect holeImgRect(0, 0, srcImg.cols, srcImg.rows);
- for (int i = 0; i < nms_result.size(); ++i) {
-
- int idx = nms_result[i];
- OutputSeg result;
- result.id = class_ids[idx];
- result.confidence = confidences[idx];
- result.box = boxes[idx] & holeImgRect;
- temp_mask_proposals.push_back(picked_proposals[idx]);
- output.push_back(result);
- }
- MaskParams mask_params;
- mask_params.params = params;
- mask_params.srcImgShape = srcImg.size();
- for (int i = 0; i < temp_mask_proposals.size(); ++i) {
- GetMask2(Mat(temp_mask_proposals[i]).t(), net_output_img[1], output[i], mask_params);
- }
但是我read模型的时候报错:ERROR during processing node with 2 inputs and 1 outputs: [Reshape]:(/model.22/dfl/Reshape_output_0) from domain='ai.onnx'
应该是OpenCV版本需要升级到4.7。之前部署检测的时候也报这个错:yolov8 OpenCV DNN 部署 推理报错_爱钓鱼的歪猴的博客-CSDN博客
我不想升级OpenCV了,所以选择用ONNX RUNTIME 部署
二、ONNX RUNTIME C++ 部署
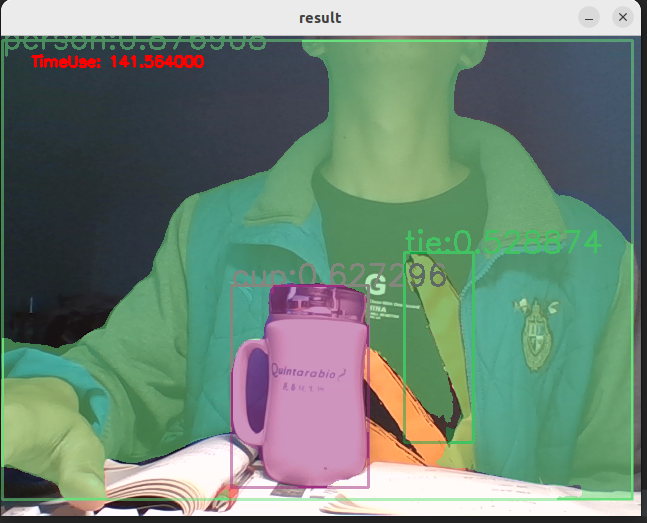
yolov8n-seg CPU 推理耗时150ms左右, 速度比yolov5n-seg慢一点(100ms),但是检测效果好一些,具体来说,同样是我穿上这件外套,yolov8n-seg给出的置信度更高!
yolov8_seg_utils.h
- #pragma once
- #include<iostream>
- #include <numeric>
- #include<opencv2/opencv.hpp>
-
- #define YOLO_P6 false //是否使用P6模型
- #define ORT_OLD_VISON 12 //ort1.12.0 之前的版本为旧版本API
- struct OutputSeg {
- int id; //结果类别id
- float confidence; //结果置信度
- cv::Rect box; //矩形框
- cv::Mat boxMask; //矩形框内mask,节省内存空间和加快速度
- };
- struct MaskParams {
- int segChannels = 32;
- int segWidth = 160;
- int segHeight = 160;
- int netWidth = 640;
- int netHeight = 640;
- float maskThreshold = 0.5;
- cv::Size srcImgShape;
- cv::Vec4d params;
-
- };
- bool CheckParams(int netHeight, int netWidth, const int* netStride, int strideSize);
- void DrawPred(cv::Mat& img, std::vector<OutputSeg> result, std::vector<std::string> classNames, std::vector<cv::Scalar> color);
- void LetterBox(const cv::Mat& image, cv::Mat& outImage,
- cv::Vec4d& params, //[ratio_x,ratio_y,dw,dh]
- const cv::Size& newShape = cv::Size(640, 640),
- bool autoShape = false,
- bool scaleFill = false,
- bool scaleUp = true,
- int stride = 32,
- const cv::Scalar& color = cv::Scalar(114, 114, 114));
- void GetMask(const cv::Mat& maskProposals, const cv::Mat& maskProtos, std::vector<OutputSeg>& output, const MaskParams& maskParams);
- void GetMask2(const cv::Mat& maskProposals, const cv::Mat& maskProtos, OutputSeg& output, const MaskParams& maskParams);
yolov8_seg_utils.cpp
- #pragma once
- #include "yolov8_seg_utils.h"
- using namespace cv;
- using namespace std;
- bool CheckParams(int netHeight, int netWidth, const int* netStride, int strideSize) {
- if (netHeight % netStride[strideSize - 1] != 0 || netWidth % netStride[strideSize - 1] != 0)
- {
- cout << "Error:_netHeight and _netWidth must be multiple of max stride " << netStride[strideSize - 1] << "!" << endl;
- return false;
- }
- return true;
- }
-
- void LetterBox(const cv::Mat& image, cv::Mat& outImage, cv::Vec4d& params, const cv::Size& newShape,
- bool autoShape, bool scaleFill, bool scaleUp, int stride, const cv::Scalar& color)
- {
- if (false) {
- int maxLen = MAX(image.rows, image.cols);
- outImage = Mat::zeros(Size(maxLen, maxLen), CV_8UC3);
- image.copyTo(outImage(Rect(0, 0, image.cols, image.rows)));
- params[0] = 1;
- params[1] = 1;
- params[3] = 0;
- params[2] = 0;
- }
-
- cv::Size shape = image.size();
- float r = std::min((float)newShape.height / (float)shape.height,
- (float)newShape.width / (float)shape.width);
- if (!scaleUp)
- r = std::min(r, 1.0f);
-
- float ratio[2]{ r, r };
- int new_un_pad[2] = { (int)std::round((float)shape.width * r),(int)std::round((float)shape.height * r) };
-
- auto dw = (float)(newShape.width - new_un_pad[0]);
- auto dh = (float)(newShape.height - new_un_pad[1]);
-
- if (autoShape)
- {
- dw = (float)((int)dw % stride);
- dh = (float)((int)dh % stride);
- }
- else if (scaleFill)
- {
- dw = 0.0f;
- dh = 0.0f;
- new_un_pad[0] = newShape.width;
- new_un_pad[1] = newShape.height;
- ratio[0] = (float)newShape.width / (float)shape.width;
- ratio[1] = (float)newShape.height / (float)shape.height;
- }
-
- dw /= 2.0f;
- dh /= 2.0f;
-
- if (shape.width != new_un_pad[0] && shape.height != new_un_pad[1])
- {
- cv::resize(image, outImage, cv::Size(new_un_pad[0], new_un_pad[1]));
- }
- else {
- outImage = image.clone();
- }
-
- int top = int(std::round(dh - 0.1f));
- int bottom = int(std::round(dh + 0.1f));
- int left = int(std::round(dw - 0.1f));
- int right = int(std::round(dw + 0.1f));
- params[0] = ratio[0];
- params[1] = ratio[1];
- params[2] = left;
- params[3] = top;
- cv::copyMakeBorder(outImage, outImage, top, bottom, left, right, cv::BORDER_CONSTANT, color);
- }
-
- void GetMask(const cv::Mat& maskProposals, const cv::Mat& maskProtos, std::vector<OutputSeg>& output, const MaskParams& maskParams) {
- //cout << maskProtos.size << endl;
-
- int seg_channels = maskParams.segChannels;
- int net_width = maskParams.netWidth;
- int seg_width = maskParams.segWidth;
- int net_height = maskParams.netHeight;
- int seg_height = maskParams.segHeight;
- float mask_threshold = maskParams.maskThreshold;
- Vec4f params = maskParams.params;
- Size src_img_shape = maskParams.srcImgShape;
-
- Mat protos = maskProtos.reshape(0, { seg_channels,seg_width * seg_height });
-
- Mat matmul_res = (maskProposals * protos).t();
- Mat masks = matmul_res.reshape(output.size(), { seg_width,seg_height });
- vector<Mat> maskChannels;
- split(masks, maskChannels);
- for (int i = 0; i < output.size(); ++i) {
- Mat dest, mask;
- //sigmoid
- cv::exp(-maskChannels[i], dest);
- dest = 1.0 / (1.0 + dest);
-
- Rect roi(int(params[2] / net_width * seg_width), int(params[3] / net_height * seg_height), int(seg_width - params[2] / 2), int(seg_height - params[3] / 2));
- dest = dest(roi);
- resize(dest, mask, src_img_shape, INTER_NEAREST);
-
- //crop
- Rect temp_rect = output[i].box;
- mask = mask(temp_rect) > mask_threshold;
- output[i].boxMask = mask;
- }
- }
-
- void GetMask2(const Mat& maskProposals, const Mat& mask_protos, OutputSeg& output, const MaskParams& maskParams) {
- int seg_channels = maskParams.segChannels;
- int net_width = maskParams.netWidth;
- int seg_width = maskParams.segWidth;
- int net_height = maskParams.netHeight;
- int seg_height = maskParams.segHeight;
- float mask_threshold = maskParams.maskThreshold;
- Vec4f params = maskParams.params;
- Size src_img_shape = maskParams.srcImgShape;
-
- Rect temp_rect = output.box;
- //crop from mask_protos
- int rang_x = floor((temp_rect.x * params[0] + params[2]) / net_width * seg_width);
- int rang_y = floor((temp_rect.y * params[1] + params[3]) / net_height * seg_height);
- int rang_w = ceil(((temp_rect.x + temp_rect.width) * params[0] + params[2]) / net_width * seg_width) - rang_x;
- int rang_h = ceil(((temp_rect.y + temp_rect.height) * params[1] + params[3]) / net_height * seg_height) - rang_y;
-
- //如果下面的 mask_protos(roi_rangs).clone()位置报错,说明你的output.box数据不对,或者矩形框就1个像素的,开启下面的注释部分防止报错。
- rang_w = MAX(rang_w, 1);
- rang_h = MAX(rang_h, 1);
- if (rang_x + rang_w > seg_width) {
- if (seg_width - rang_x > 0)
- rang_w = seg_width - rang_x;
- else
- rang_x -= 1;
- }
- if (rang_y + rang_h > seg_height) {
- if (seg_height - rang_y > 0)
- rang_h = seg_height - rang_y;
- else
- rang_y -= 1;
- }
-
- vector<Range> roi_rangs;
- roi_rangs.push_back(Range(0, 1));
- roi_rangs.push_back(Range::all());
- roi_rangs.push_back(Range(rang_y, rang_h + rang_y));
- roi_rangs.push_back(Range(rang_x, rang_w + rang_x));
-
- //crop
- Mat temp_mask_protos = mask_protos(roi_rangs).clone();
- Mat protos = temp_mask_protos.reshape(0, { seg_channels,rang_w * rang_h });
- Mat matmul_res = (maskProposals * protos).t();
- Mat masks_feature = matmul_res.reshape(1, { rang_h,rang_w });
- Mat dest, mask;
-
- //sigmoid
- cv::exp(-masks_feature, dest);
- dest = 1.0 / (1.0 + dest);
-
- int left = floor((net_width / seg_width * rang_x - params[2]) / params[0]);
- int top = floor((net_height / seg_height * rang_y - params[3]) / params[1]);
- int width = ceil(net_width / seg_width * rang_w / params[0]);
- int height = ceil(net_height / seg_height * rang_h / params[1]);
-
- resize(dest, mask, Size(width, height), INTER_NEAREST);
- mask = mask(temp_rect - Point(left, top)) > mask_threshold;
- output.boxMask = mask;
-
- }
-
- void DrawPred(Mat& img, vector<OutputSeg> result, std::vector<std::string> classNames, vector<Scalar> color) {
- Mat mask = img.clone();
- for (int i = 0; i < result.size(); i++) {
- int left, top;
- left = result[i].box.x;
- top = result[i].box.y;
- int color_num = i;
- rectangle(img, result[i].box, color[result[i].id], 2, 8);
- if(result[i].boxMask.rows&& result[i].boxMask.cols>0)
- mask(result[i].box).setTo(color[result[i].id], result[i].boxMask);
- string label = classNames[result[i].id] + ":" + to_string(result[i].confidence);
- int baseLine;
- Size labelSize = getTextSize(label, FONT_HERSHEY_SIMPLEX, 0.5, 1, &baseLine);
- top = max(top, labelSize.height);
- //rectangle(frame, Point(left, top - int(1.5 * labelSize.height)), Point(left + int(1.5 * labelSize.width), top + baseLine), Scalar(0, 255, 0), FILLED);
- putText(img, label, Point(left, top), FONT_HERSHEY_SIMPLEX, 1, color[result[i].id], 2);
- }
- addWeighted(img, 0.5, mask, 0.5, 0, img); //add mask to src
- // imshow("1", img);
- //imwrite("out.bmp", img);
- // waitKey();
- //destroyAllWindows();
-
- }
yolov8_seg_onnx.h
- #pragma once
- #include <iostream>
- #include<memory>
- #include <opencv2/opencv.hpp>
- #include "yolov8_seg_utils.h"
- #include<onnxruntime_cxx_api.h>
-
- //#include <tensorrt_provider_factory.h> //if use OrtTensorRTProviderOptionsV2
- //#include <onnxruntime_c_api.h>
-
-
- class Yolov8SegOnnx {
- public:
- Yolov8SegOnnx() :_OrtMemoryInfo(Ort::MemoryInfo::CreateCpu(OrtAllocatorType::OrtDeviceAllocator, OrtMemType::OrtMemTypeCPUOutput)) {};
- ~Yolov8SegOnnx() {};// delete _OrtMemoryInfo;
-
-
- public:
- /** \brief Read onnx-model
- * \param[in] modelPath:onnx-model path
- * \param[in] isCuda:if true,use Ort-GPU,else run it on cpu.
- * \param[in] cudaID:if isCuda==true,run Ort-GPU on cudaID.
- * \param[in] warmUp:if isCuda==true,warm up GPU-model.
- */
- bool ReadModel(const std::string& modelPath, bool isCuda = false, int cudaID = 0, bool warmUp = true);
-
- /** \brief detect.
- * \param[in] srcImg:a 3-channels image.
- * \param[out] output:detection results of input image.
- */
- bool OnnxDetect(cv::Mat& srcImg, std::vector<OutputSeg>& output);
- /** \brief detect,batch size= _batchSize
- * \param[in] srcImg:A batch of images.
- * \param[out] output:detection results of input images.
- */
- bool OnnxBatchDetect(std::vector<cv::Mat>& srcImg, std::vector<std::vector<OutputSeg>>& output);
-
- private:
-
- template <typename T>
- T VectorProduct(const std::vector<T>& v)
- {
- return std::accumulate(v.begin(), v.end(), 1, std::multiplies<T>());
- };
- int Preprocessing(const std::vector<cv::Mat>& SrcImgs, std::vector<cv::Mat>& OutSrcImgs, std::vector<cv::Vec4d>& params);
- #if(defined YOLO_P6 && YOLO_P6==true)
- //const float _netAnchors[4][6] = { { 19,27, 44,40, 38,94 },{ 96,68, 86,152, 180,137 },{ 140,301, 303,264, 238,542 },{ 436,615, 739,380, 925,792 } };
- const int _netWidth = 1280; //ONNX图片输入宽度
- const int _netHeight = 1280; //ONNX图片输入高度
- const int _segWidth = 320; //_segWidth=_netWidth/mask_ratio
- const int _segHeight = 320;
- const int _segChannels = 32;
-
- #else
- //const float _netAnchors[3][6] = { { 10,13, 16,30, 33,23 },{ 30,61, 62,45, 59,119 },{ 116,90, 156,198, 373,326 } };
- const int _netWidth = 640; //ONNX-net-input-width
- const int _netHeight = 640; //ONNX-net-input-height
- const int _segWidth = 160; //_segWidth=_netWidth/mask_ratio
- const int _segHeight = 160;
- const int _segChannels = 32;
-
- #endif // YOLO_P6
-
- int _batchSize = 1; //if multi-batch,set this
- bool _isDynamicShape = false;//onnx support dynamic shape
-
-
- float _classThreshold = 0.5;
- float _nmsThreshold = 0.45;
- float _maskThreshold = 0.5;
-
-
- //ONNXRUNTIME
- Ort::Env _OrtEnv = Ort::Env(OrtLoggingLevel::ORT_LOGGING_LEVEL_ERROR, "Yolov5-Seg");
- Ort::SessionOptions _OrtSessionOptions = Ort::SessionOptions();
- Ort::Session* _OrtSession = nullptr;
- Ort::MemoryInfo _OrtMemoryInfo;
- #if ORT_API_VERSION < ORT_OLD_VISON
-
- char* _inputName, * _output_name0, * _output_name1;
- #else
- std::shared_ptr<char> _inputName, _output_name0,_output_name1;
- #endif
-
- std::vector<char*> _inputNodeNames; //输入节点名
- std::vector<char*> _outputNodeNames;//输出节点名
-
- size_t _inputNodesNum = 0; //输入节点数
- size_t _outputNodesNum = 0; //输出节点数
-
- ONNXTensorElementDataType _inputNodeDataType; //数据类型
- ONNXTensorElementDataType _outputNodeDataType;
- std::vector<int64_t> _inputTensorShape; //输入张量shape
-
- std::vector<int64_t> _outputTensorShape;
- std::vector<int64_t> _outputMaskTensorShape;
- public:
- std::vector<std::string> _className = {
- "person", "bicycle", "car", "motorcycle", "airplane", "bus", "train", "truck", "boat", "traffic light",
- "fire hydrant", "stop sign", "parking meter", "bench", "bird", "cat", "dog", "horse", "sheep", "cow",
- "elephant", "bear", "zebra", "giraffe", "backpack", "umbrella", "handbag", "tie", "suitcase", "frisbee",
- "skis", "snowboard", "sports ball", "kite", "baseball bat", "baseball glove", "skateboard", "surfboard",
- "tennis racket", "bottle", "wine glass", "cup", "fork", "knife", "spoon", "bowl", "banana", "apple",
- "sandwich", "orange", "broccoli", "carrot", "hot dog", "pizza", "donut", "cake", "chair", "couch",
- "potted plant", "bed", "dining table", "toilet", "tv", "laptop", "mouse", "remote", "keyboard", "cell phone",
- "microwave", "oven", "toaster", "sink", "refrigerator", "book", "clock", "vase", "scissors", "teddy bear",
- "hair drier", "toothbrush"
- };
-
-
-
- };
yolov8_seg_onnx.cpp
- #include "yolov8_seg_onnx.h"
- using namespace std;
- using namespace cv;
- using namespace cv::dnn;
- using namespace Ort;
-
- bool Yolov8SegOnnx::ReadModel(const std::string& modelPath, bool isCuda, int cudaID, bool warmUp) {
- if (_batchSize < 1) _batchSize = 1;
- try
- {
- std::vector<std::string> available_providers = GetAvailableProviders();
- auto cuda_available = std::find(available_providers.begin(), available_providers.end(), "CUDAExecutionProvider");
-
- if (isCuda && (cuda_available == available_providers.end()))
- {
- std::cout << "Your ORT build without GPU. Change to CPU." << std::endl;
- std::cout << "************* Infer model on CPU! *************" << std::endl;
- }
- else if (isCuda && (cuda_available != available_providers.end()))
- {
- std::cout << "************* Infer model on GPU! *************" << std::endl;
- //#if ORT_API_VERSION < ORT_OLD_VISON
- // OrtCUDAProviderOptions cudaOption;
- // cudaOption.device_id = cudaID;
- // _OrtSessionOptions.AppendExecutionProvider_CUDA(cudaOption);
- //#else
- // OrtStatus* status = OrtSessionOptionsAppendExecutionProvider_CUDA(_OrtSessionOptions, cudaID);
- //#endif
- }
- else
- {
- std::cout << "************* Infer model on CPU! *************" << std::endl;
- }
- //
- _OrtSessionOptions.SetGraphOptimizationLevel(GraphOptimizationLevel::ORT_ENABLE_EXTENDED);
-
- #ifdef _WIN32
- std::wstring model_path(modelPath.begin(), modelPath.end());
- _OrtSession = new Ort::Session(_OrtEnv, model_path.c_str(), _OrtSessionOptions);
- #else
- _OrtSession = new Ort::Session(_OrtEnv, modelPath.c_str(), _OrtSessionOptions);
- #endif
-
- Ort::AllocatorWithDefaultOptions allocator;
- //init input
- _inputNodesNum = _OrtSession->GetInputCount();
- #if ORT_API_VERSION < ORT_OLD_VISON
- _inputName = _OrtSession->GetInputName(0, allocator);
- _inputNodeNames.push_back(_inputName);
- #else
- _inputName = std::move(_OrtSession->GetInputNameAllocated(0, allocator));
- _inputNodeNames.push_back(_inputName.get());
- #endif
-
- Ort::TypeInfo inputTypeInfo = _OrtSession->GetInputTypeInfo(0);
- auto input_tensor_info = inputTypeInfo.GetTensorTypeAndShapeInfo();
- _inputNodeDataType = input_tensor_info.GetElementType();
- _inputTensorShape = input_tensor_info.GetShape();
-
- if (_inputTensorShape[0] == -1)
- {
- _isDynamicShape = true;
- _inputTensorShape[0] = _batchSize;
-
- }
- if (_inputTensorShape[2] == -1 || _inputTensorShape[3] == -1) {
- _isDynamicShape = true;
- _inputTensorShape[2] = _netHeight;
- _inputTensorShape[3] = _netWidth;
- }
- //init output
- _outputNodesNum = _OrtSession->GetOutputCount();
- if (_outputNodesNum != 2) {
- cout << "This model has " << _outputNodesNum << "output, which is not a segmentation model.Please check your model name or path!" << endl;
- return false;
- }
- #if ORT_API_VERSION < ORT_OLD_VISON
- _output_name0 = _OrtSession->GetOutputName(0, allocator);
- _output_name1 = _OrtSession->GetOutputName(1, allocator);
- #else
- _output_name0 = std::move(_OrtSession->GetOutputNameAllocated(0, allocator));
- _output_name1 = std::move(_OrtSession->GetOutputNameAllocated(1, allocator));
- #endif
- Ort::TypeInfo type_info_output0(nullptr);
- Ort::TypeInfo type_info_output1(nullptr);
- bool flag = false;
- #if ORT_API_VERSION < ORT_OLD_VISON
- flag = strcmp(_output_name0, _output_name1) < 0;
- #else
- flag = strcmp(_output_name0.get(), _output_name1.get()) < 0;
- #endif
- if (flag) //make sure "output0" is in front of "output1"
- {
- type_info_output0 = _OrtSession->GetOutputTypeInfo(0); //output0
- type_info_output1 = _OrtSession->GetOutputTypeInfo(1); //output1
- #if ORT_API_VERSION < ORT_OLD_VISON
- _outputNodeNames.push_back(_output_name0);
- _outputNodeNames.push_back(_output_name1);
- #else
- _outputNodeNames.push_back(_output_name0.get());
- _outputNodeNames.push_back(_output_name1.get());
- #endif
-
- }
- else {
- type_info_output0 = _OrtSession->GetOutputTypeInfo(1); //output0
- type_info_output1 = _OrtSession->GetOutputTypeInfo(0); //output1
- #if ORT_API_VERSION < ORT_OLD_VISON
- _outputNodeNames.push_back(_output_name1);
- _outputNodeNames.push_back(_output_name0);
- #else
- _outputNodeNames.push_back(_output_name1.get());
- _outputNodeNames.push_back(_output_name0.get());
- #endif
- }
-
- auto tensor_info_output0 = type_info_output0.GetTensorTypeAndShapeInfo();
- _outputNodeDataType = tensor_info_output0.GetElementType();
- _outputTensorShape = tensor_info_output0.GetShape();
- auto tensor_info_output1 = type_info_output1.GetTensorTypeAndShapeInfo();
- //_outputMaskNodeDataType = tensor_info_output1.GetElementType(); //the same as output0
- //_outputMaskTensorShape = tensor_info_output1.GetShape();
- //if (_outputTensorShape[0] == -1)
- //{
- // _outputTensorShape[0] = _batchSize;
- // _outputMaskTensorShape[0] = _batchSize;
- //}
- //if (_outputMaskTensorShape[2] == -1) {
- // //size_t ouput_rows = 0;
- // //for (int i = 0; i < _strideSize; ++i) {
- // // ouput_rows += 3 * (_netWidth / _netStride[i]) * _netHeight / _netStride[i];
- // //}
- // //_outputTensorShape[1] = ouput_rows;
-
- // _outputMaskTensorShape[2] = _segHeight;
- // _outputMaskTensorShape[3] = _segWidth;
- //}
- //warm up
- if (isCuda && warmUp) {
- //draw run
- cout << "Start warming up" << endl;
- size_t input_tensor_length = VectorProduct(_inputTensorShape);
- float* temp = new float[input_tensor_length];
- std::vector<Ort::Value> input_tensors;
- std::vector<Ort::Value> output_tensors;
- input_tensors.push_back(Ort::Value::CreateTensor<float>(
- _OrtMemoryInfo, temp, input_tensor_length, _inputTensorShape.data(),
- _inputTensorShape.size()));
- for (int i = 0; i < 3; ++i) {
- output_tensors = _OrtSession->Run(Ort::RunOptions{ nullptr },
- _inputNodeNames.data(),
- input_tensors.data(),
- _inputNodeNames.size(),
- _outputNodeNames.data(),
- _outputNodeNames.size());
- }
-
- delete[]temp;
- }
- }
- catch (const std::exception&) {
- return false;
- }
-
- }
-
- int Yolov8SegOnnx::Preprocessing(const std::vector<cv::Mat>& srcImgs, std::vector<cv::Mat>& outSrcImgs, std::vector<cv::Vec4d>& params) {
- outSrcImgs.clear();
- Size input_size = Size(_netWidth, _netHeight);
- for (int i = 0; i < srcImgs.size(); ++i) {
- Mat temp_img = srcImgs[i];
- Vec4d temp_param = { 1,1,0,0 };
- if (temp_img.size() != input_size) {
- Mat borderImg;
- LetterBox(temp_img, borderImg, temp_param, input_size, false, false, true, 32);
- //cout << borderImg.size() << endl;
- outSrcImgs.push_back(borderImg);
- params.push_back(temp_param);
- }
- else {
- outSrcImgs.push_back(temp_img);
- params.push_back(temp_param);
- }
- }
-
- int lack_num = srcImgs.size() % _batchSize;
- if (lack_num != 0) {
- for (int i = 0; i < lack_num; ++i) {
- Mat temp_img = Mat::zeros(input_size, CV_8UC3);
- Vec4d temp_param = { 1,1,0,0 };
- outSrcImgs.push_back(temp_img);
- params.push_back(temp_param);
- }
- }
- return 0;
-
- }
- bool Yolov8SegOnnx::OnnxDetect(cv::Mat& srcImg, std::vector<OutputSeg>& output) {
- std::vector<cv::Mat> input_data = { srcImg };
- std::vector<std::vector<OutputSeg>> tenp_output;
- if (OnnxBatchDetect(input_data, tenp_output)) {
- output = tenp_output[0];
- return true;
- }
- else return false;
- }
- bool Yolov8SegOnnx::OnnxBatchDetect(std::vector<cv::Mat>& srcImgs, std::vector<std::vector<OutputSeg>>& output) {
- vector<Vec4d> params;
- vector<Mat> input_images;
- cv::Size input_size(_netWidth, _netHeight);
- //preprocessing
- Preprocessing(srcImgs, input_images, params);
- cv::Mat blob = cv::dnn::blobFromImages(input_images, 1 / 255.0, input_size, Scalar(0, 0, 0), true, false);
-
- int64_t input_tensor_length = VectorProduct(_inputTensorShape);
- std::vector<Ort::Value> input_tensors;
- std::vector<Ort::Value> output_tensors;
- input_tensors.push_back(Ort::Value::CreateTensor<float>(_OrtMemoryInfo, (float*)blob.data, input_tensor_length, _inputTensorShape.data(), _inputTensorShape.size()));
-
- output_tensors = _OrtSession->Run(Ort::RunOptions{ nullptr },
- _inputNodeNames.data(),
- input_tensors.data(),
- _inputNodeNames.size(),
- _outputNodeNames.data(),
- _outputNodeNames.size()
- );
-
- //post-process
-
- int net_width = _className.size() + 4 + _segChannels;
- float* all_data = output_tensors[0].GetTensorMutableData<float>();
- _outputTensorShape = output_tensors[0].GetTensorTypeAndShapeInfo().GetShape();
- _outputMaskTensorShape = output_tensors[1].GetTensorTypeAndShapeInfo().GetShape();
- vector<int> mask_protos_shape = { 1,(int)_outputMaskTensorShape[1],(int)_outputMaskTensorShape[2],(int)_outputMaskTensorShape[3] };
- int mask_protos_length = VectorProduct(mask_protos_shape);
- int64_t one_output_length = VectorProduct(_outputTensorShape) / _outputTensorShape[0];
- for (int img_index = 0; img_index < srcImgs.size(); ++img_index) {
- Mat output0 = Mat(Size((int)_outputTensorShape[2], (int)_outputTensorShape[1]), CV_32F, all_data).t(); //[bs,116,8400]=>[bs,8400,116]
- all_data += one_output_length;
- float* pdata = (float*)output0.data;
- int rows = output0.rows;
- std::vector<int> class_ids;//\BD\E1\B9\FBid\CA\FD\D7\E9
- std::vector<float> confidences;//\BD\E1\B9\FBÿ\B8\F6id\B6\D4Ӧ\D6\C3\D0Ŷ\C8\CA\FD\D7\E9
- std::vector<cv::Rect> boxes;//ÿ\B8\F6id\BE\D8\D0ο\F2
- std::vector<vector<float>> picked_proposals; //output0[:,:, 5 + _className.size():net_width]===> for mask
- for (int r = 0; r < rows; ++r) { //stride
- cv::Mat scores(1, _className.size(), CV_32F, pdata +4);
- Point classIdPoint;
- double max_class_socre;
- minMaxLoc(scores, 0, &max_class_socre, 0, &classIdPoint);
- max_class_socre = (float)max_class_socre;
- if (max_class_socre >= _classThreshold) {
- vector<float> temp_proto(pdata + 4 + _className.size(), pdata + net_width);
- picked_proposals.push_back(temp_proto);
- //rect [x,y,w,h]
- float x = (pdata[0] - params[img_index][2]) / params[img_index][0]; //x
- float y = (pdata[1] - params[img_index][3]) / params[img_index][1]; //y
- float w = pdata[2] / params[img_index][0]; //w
- float h = pdata[3] / params[img_index][1]; //h
- int left = MAX(int(x - 0.5 * w + 0.5), 0);
- int top = MAX(int(y - 0.5 * h + 0.5), 0);
- class_ids.push_back(classIdPoint.x);
- confidences.push_back(max_class_socre );
- boxes.push_back(Rect(left, top, int(w + 0.5), int(h + 0.5)));
- }
- pdata += net_width;//\CF\C2һ\D0\D0
- }
-
- vector<int> nms_result;
- cv::dnn::NMSBoxes(boxes, confidences, _classThreshold, _nmsThreshold, nms_result);
- std::vector<vector<float>> temp_mask_proposals;
- cv::Rect holeImgRect(0, 0, srcImgs[img_index].cols, srcImgs[img_index].rows);
- std::vector<OutputSeg> temp_output;
- for (int i = 0; i < nms_result.size(); ++i) {
- int idx = nms_result[i];
- OutputSeg result;
- result.id = class_ids[idx];
- result.confidence = confidences[idx];
- result.box = boxes[idx] & holeImgRect;
- temp_mask_proposals.push_back(picked_proposals[idx]);
- temp_output.push_back(result);
- }
-
- MaskParams mask_params;
- mask_params.params = params[img_index];
- mask_params.srcImgShape = srcImgs[img_index].size();
- Mat mask_protos = Mat(mask_protos_shape, CV_32F, output_tensors[1].GetTensorMutableData<float>() + img_index * mask_protos_length);
- for (int i = 0; i < temp_mask_proposals.size(); ++i) {
- GetMask2(Mat(temp_mask_proposals[i]).t(), mask_protos, temp_output[i], mask_params);
- }
-
- //******************** ****************
- // \C0ϰ汾\B5ķ\BD\B0\B8\A3\AC\C8\E7\B9\FB\C9\CF\C3\E6\D4ڿ\AA\C6\F4\CE\D2ע\CA͵IJ\BF\B7\D6֮\BA\F3\BB\B9һֱ\B1\A8\B4\ED\A3\AC\BD\A8\D2\E9ʹ\D3\C3\D5\E2\B8\F6\A1\A3
- // If the GetMask2() still reports errors , it is recommended to use GetMask().
- // Mat mask_proposals;
- //for (int i = 0; i < temp_mask_proposals.size(); ++i)
- // mask_proposals.push_back(Mat(temp_mask_proposals[i]).t());
- //GetMask(mask_proposals, mask_protos, output, mask_params);
- //*****************************************************/
- output.push_back(temp_output);
-
- }
-
- if (output.size())
- return true;
- else
- return false;
- }
main.cpp
- #include <iostream>
- #include <opencv2/opencv.hpp>
-
- #include "yolov8_seg_onnx.h"
- #include "yolov8_seg_utils.h"
- #include <sys/time.h>
-
- using namespace std;
- using namespace cv;
-
- int main()
- {
- string model_path = "/home/jason/PycharmProjects/pytorch_learn/yolo/ultralytics-main-yolov8/yolov8n-seg.onnx";
-
- Yolov8SegOnnx test;
-
- if(test.ReadModel(model_path,false,0,false))
- cout << "read net ok!\n";
- else
- cout << "read net err!\n";
-
-
- vector<Scalar> color;
- srand(time(0));
-
- for (int i=0; i<80; i++){
- int b = rand() % 256;
- int g = rand() % 256;
- int r = rand() % 256;
- color.push_back(Scalar(b,g,r));
- }
-
-
-
- struct timeval t1, t2;
- double timeuse;
- VideoCapture capture(0);
- Mat frame;
- vector<OutputSeg> output;
-
-
-
- while(1){
- capture >> frame;
- output.clear();
-
- gettimeofday(&t1, NULL);
- bool find = test.OnnxDetect(frame, output);
- gettimeofday(&t2, NULL);
-
- if (find)
- DrawPred(frame, output, test._className, color);
- else
- cout << "not find!\n";
-
-
- timeuse = (t2.tv_sec - t1.tv_sec) + (double)(t2.tv_usec - t1.tv_usec)/1000000; // s
- timeuse *= 1000; // ms
- string label = "TimeUse: " + to_string(timeuse);
- putText(frame, label, Point(30,30), FONT_HERSHEY_SIMPLEX, 0.5, Scalar(0,0,255), 2, 8);
-
- imshow("result", frame);
- if(waitKey(1)=='q') break;
- }
-
- return 0;
- }
CMakelist.txt
- find_package(OpenCV 4 REQUIRED)
- include_directories(/home/jason/下载/onnxruntime-linux-x64-1.14.1/include)
- include_directories(./include )
- aux_source_directory(./src SOURCES_LIST)
-
- add_executable(${PROJECT_NAME} ${SOURCES_LIST})
- target_link_libraries(${PROJECT_NAME} ${OpenCV_LIBS} "/home/jason/下载/onnxruntime-linux-x64-1.14.1/lib/libonnxruntime.so")
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/45466
推荐阅读


相关标签

