
热门标签
热门文章
- 1云原生之使用Docker部署Dashy个人导航页_docker 导航页
- 2xcode iOS 17.2 not install, Simulator 手动安装_ios17.2 simulator
- 3nvidia driver、cuda、cudnn、nvidia-docker 安装、配置和部署(Ubuntu 18.04 LTS)_nvidia docker 版本
- 4Unity零基础入门 - 见缝插针_开发gamemanager去生成针
- 5企业、工厂如何运用智能物联网技术, 降低能耗、实现节能减排?_对于和物联网控制系统节能合作需要了解什么内容
- 62-4《学生食堂信息管理系统》饭卡管理模块_录入时间列(register_date)默认值为当前录入时间
- 7kubernetes--pod的生命周期管理(PostStart,PreStop)
- 8neo4j教程-安装部署_neo4j安装
- 9【TCP】流量控制和拥塞控制
- 10论文排版神器VSCode+LaTeX最新保姆级图文配置教程_vscode latex
当前位置: article > 正文
模板匹配 解决模板旋转以及重复检测问题_模板匹配如何针对旋转
作者:思考机器4 | 2024-01-31 14:31:07
赞
踩
模板匹配如何针对旋转
OpenCV Error: Assertion failed (scn == 3 || scn == 4)
in cv::cvtColor, file C:\projects\opencv-python\opencv\modules\imgproc\src\color.cpp, line 11111
- 1
- 2
1 加载路径有错误
2 参数0是灰度,再灰度化出错
模板匹配 import cv2 import numpy as np #加载原始RGB图像 img_rgb = cv2.imread("C:/Users/AEC/Desktop/1.png") #创建一个原始图像的灰度版本,所有操作在灰度版本中处理,然后在RGB图像中使用相同坐标还原 img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY) #加载将要搜索的图像模板 template = cv2.imread('C:/Users/AEC/Desktop/2.png',0) #记录图像模板的尺寸 w, h = template.shape[::-1] """ #查看三组图像(图像标签名称,文件名称) cv2.namedWindow("rgb") cv2.imshow('rgb',img_rgb) cv2.namedWindow("gray") cv2.imshow('gray',img_gray) cv2.namedWindow("template") cv2.imshow('template',template) cv2.waitKey(0) cv2.destroyAllWindows() """ #使用matchTemplate对原始灰度图像和图像模板进行匹配 res = cv2.matchTemplate(img_gray,template,cv2.TM_CCOEFF_NORMED) #设定阈值 threshold = 0.7 #res大于70% loc = np.where( res >= threshold) #使用灰度图像中的坐标对原始RGB图像进行标记 for pt in zip(*loc[::-1]): cv2.rectangle(img_rgb, pt, (pt[0] + w, pt[1] + h), (0,0,255), 2) #显示图像 cv2.namedWindow("Detected",0) cv2.imshow('Detected',img_rgb) cv2.imwrite("1_after.png",img_rgb) cv2.waitKey(0) cv2.destroyAllWindows()

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
模板

原图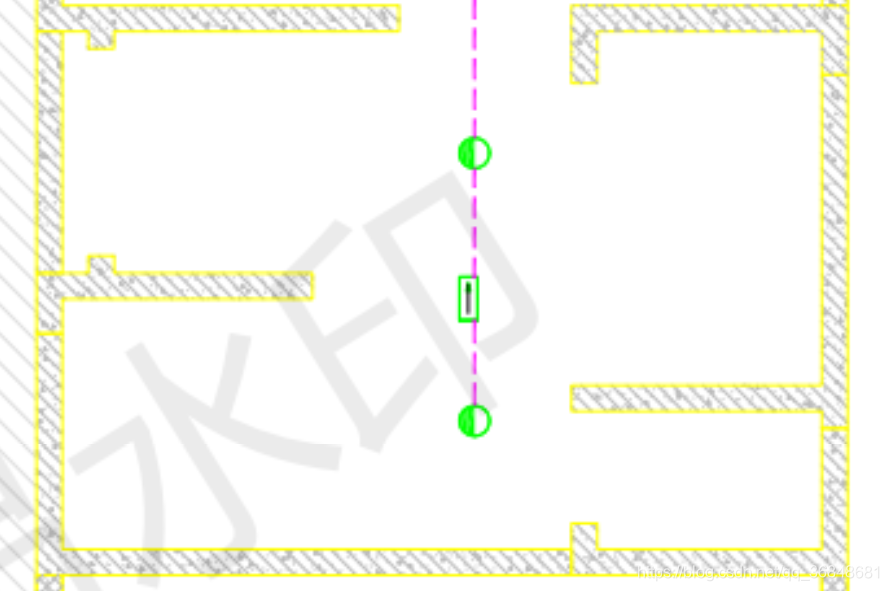
原图
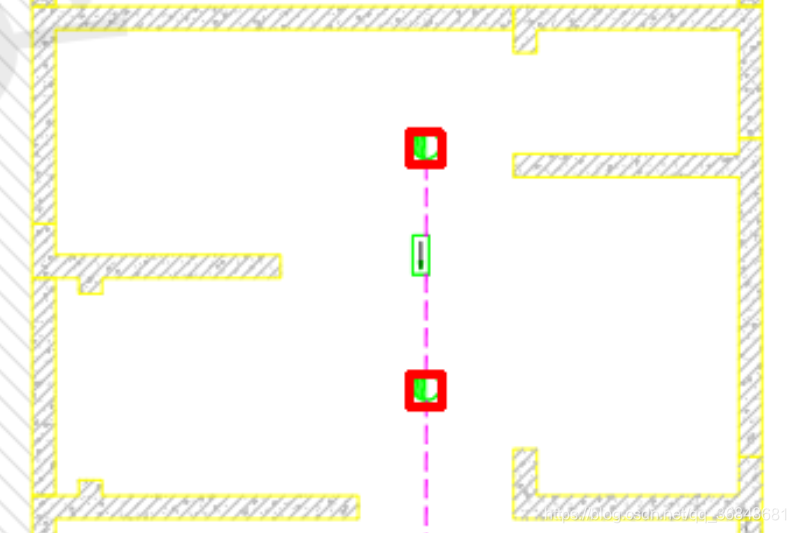
效果图
问题1 如果图像旋转了就匹配不到,试着解决这个问题 解决方案:
旋转模板匹配图案
问题2 可以看到对同一个图有多个框标定,需要去重,只需要保留一个
解决方案:对框边界值设置阈值,阈值范围内就当成一个框
问题3 可能有漏检过检情况
通过调节阈值解决
经过差不多大半天的努力解决了以上一些问题
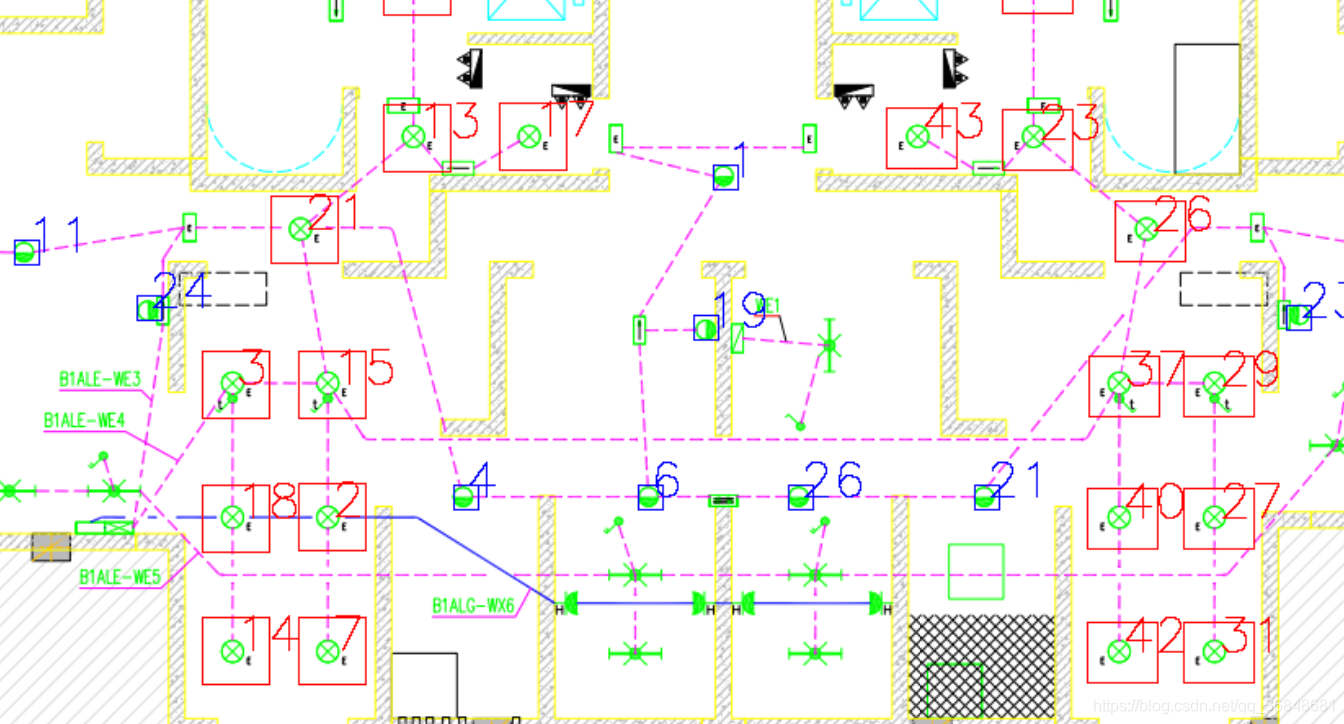
下面这个程序实现对两个图案的匹配
import cv2 import numpy as np # 加载原始RGB图像 img_rgb = cv2.imread("origin.png") # 创建一个原始图像的灰度版本,所有操作在灰度版本中处理,然后在RGB图像中使用相同坐标还原 img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY) # 加载将要搜索的图像模板 #模板1 筛选图案1 template1 = cv2.imread('template1.png', 0) #模板2 3 筛选图案2 template2 = cv2.imread('template2.png', 0) template3 = cv2.imread('template3.png', 0) # 记录图像模板的尺寸 w1, h1 = template1.shape[::-1] w2, h2 = template2.shape[::-1] w3, h3 = template3.shape[::-1] def rotate_bound(image, angle):#图片旋转但不改变大小,模板匹配中大小改变对匹配效果有影响 (h, w) = image.shape[:2] (cX, cY) = (w // 2, h // 2)#//是向下取整 M = cv2.getRotationMatrix2D((cX, cY), -angle, 1.0) cos = np.abs(M[0, 0]) sin = np.abs(M[0, 1]) nW = int((h * sin) + (w * cos)) nH = int((h * cos) + (w * sin)) M[0, 2] += (nW / 2) - cX M[1, 2] += (nH / 2) - cY return cv2.warpAffine(image, M, (nW, nH)) #选出所有匹配旋转模板且不重复的图案 def make_contour(template,w,h,angle,threshold): rects = [] # 模板旋转匹配 for i in range(0, 360, angle): new_rotate = rotate_bound(template, i) # 把图片旋转后黑色的部分填充成白色 new_rotate[new_rotate == 0] = 255 # 使用matchTemplate对原始灰度图像和图像模板进行匹配 res = cv2.matchTemplate(img_gray, new_rotate, cv2.TM_CCOEFF_NORMED) # 设定阈值 loc = np.where(res >= threshold) #x,y坐标对调打包 for pt in zip(*loc[::-1]): point = np.array([[pt[0], pt[1]], [pt[0] + w, pt[1]], [pt[0], pt[1] + h], [pt[0] + w, pt[1] + h]]) rects.append(cv2.boundingRect(point)) #模板匹配后符合要求的所有图案数量 length = len(rects) #设定阈值 threshold = 3 i = 0 #如果两个图案距离在阈值范围内,则等同,然后用集合去重 while(i<length): print(i) for j in range(length): if j != i: if np.abs(rects[j][0]-rects[i][0])<= threshold: if np.abs(rects[j][1]-rects[i][1]) <= threshold: rects[j] = rects[i] i = i+1 return set(rects) #在原图把匹配的模板框出来并输出坐标文档 def draw_contour(contours,color): count = 0 for contour in contours: cv2.rectangle(img_rgb, (contour[0], contour[1]), (contour[0] + contour[2], contour[1] + contour[3]), color, 1) cx = contour[0] + (contour[2] // 2) cy = contour[1] + (contour[3] // 2) count = count + 1 cv2.putText(img_rgb, str(count), (cx, cy), cv2.FONT_HERSHEY_SIMPLEX, 1,color, 1, 1) with open("data.txt", "a+") as f: f.write("contour" + '\t' + str(count) + '\t' + 'cx: ' + str(cx) + ' \t' + 'cy: ' + str(cy) + '\n') # 显示图像 cv2.imwrite("after.png", img_rgb) if __name__=='__main__': #a+可读可写覆盖 with open("data.txt", "a+") as f: f.write('contour1'+'\n') threshold1 = 0.69 contours1 = make_contour(template1,w1,h1,90,threshold1) color1 = (255, 0, 0) draw_contour(contours1,color1) img_rgb = cv2.imread("after.png") img_gray = cv2.cvtColor(img_rgb, cv2.COLOR_BGR2GRAY) with open("data.txt", "a+") as f: f.write('\n'+'contour2'+'\n') color2 = (0,0,255) threshold2 = 0.53 #合并轮廓 contours2 = list(make_contour(template2, w2, h2,30,threshold2))+list(make_contour(template3, w3, h3, 30, threshold2)) draw_contour(contours2,color2)
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
匹配效果很好,阈值调节需要谨慎,0.01的差距可能会造成一个漏检
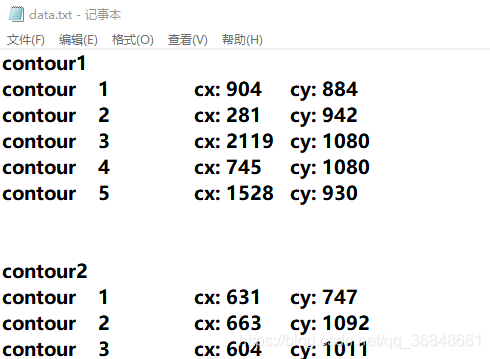
输出每个框的位置坐标
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/50790
推荐阅读
相关标签

