
热门标签
热门文章
- 1udev和mdev学习总结_mdev安装
- 2Activity的生命周期和启动模式再解析_singletop 复用 生命周期
- 3springboot集成ElasticSearch使用RestHighLevelClient连接客户端_springboot elasticsearch-rest-high-level-client
- 4VS Code中的一个可以高效写代码的插件_vscode chatmoss
- 5python --格式化时间转时间戳(互转)_python 格式化时间戳
- 6eCos的一些维护历史_ecos/packages/pkgconf/rules.mak:89: recipe for tar
- 7python案例_用python#该代码中有2处错误,请修正,使其实现直到猜对数字,程序结束,并提示:恭喜
- 8锁定 MinIO 操作员权限
- 9AAAI-19录用论文_rr-gan: single image rain removal without paired i
- 10Codeforces Round #704 (Div. 2) D. Genius‘s Gambit(构造+思维)
当前位置: article > 正文
关键路径_关键路劲必须从第一个节点开始吗
作者:itdef | 2024-01-30 13:35:00
赞
踩
关键路劲必须从第一个节点开始吗
复杂版
| 过程 |
|---|
| 1. 先搞出一个拓扑序 |
| 2. 计算最早开始时间 利用拓扑序从源点开始跑 |
| 依次求出每个点的邻接点的最早开始时间 若b是a的邻接点 |
| Earliest[b] = max(Earliest[a] + a.weight,Earliest[b]); |
| a的最最早开始时间+ a到b的权重 默认最早开始时间是0 |
| 最早完成时间 : 要等之前的节点最慢的那个完了之后才能开始这个节点 |
| 3. 由第二步即可知道路径长度,最后一个节点的完成时间就是 |
| 若还要求关键路径: |
| 4. 先求最晚开始时间 (为了当前的节点和下一个节点的最早开始时间之间 有没有空余) |
| 5. 从结尾反向扫描到源点 求出最早开始时间和最晚开始时间之间的间隔 |
| 6. 最后找到一个间隔为0的路径 这个路径就是关键路径 |
| 注释很详细 |
|---|
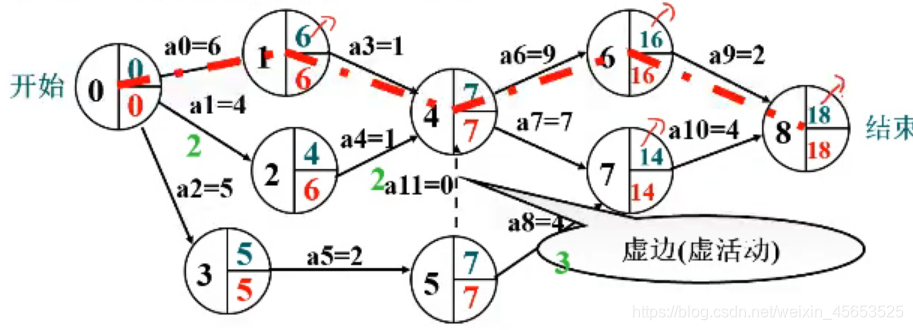
#include <iostream> #include <vector> #include <algorithm> using namespace std; struct edge { int x, y; int weight; }; struct Activity { edge e; // 最早时间和最晚时间的延迟 int d; }; // 正向图 反向图 // 反向图求最晚结束时间用 vector<vector<edge>> rode, Rrode; // 拓扑排序 vector<int> topoOrder; vector<int> vis; // 最早开始时间 vector<int> Earliest; // 最晚开始时间 vector<int> Latest; vector<Activity> Delay; int N, M; // 拓扑排序 bool dfs(int k) { vis[k] = 1; for (auto e : rode[k]) { if (vis[e.y] == 1) return false; if (!vis[e.y] && !dfs(e.y)) return false; } vis[k] = -1; topoOrder.push_back(k); return true; } bool TopSort() { for (int i = 0; i < N; i++) { if (!vis[i] && !dfs(i)) { return false; } } return true; } int CriticalPath() { // 路径长度 int res = 0; // 因为DFS的拓扑序是反着的 反过来搞一下 reverse(topoOrder.begin(), topoOrder.end()); // 最早开始时间默认为0 fill(Earliest.begin(), Earliest.end(), 0); // 求最早开始时间 - 从源点开始扫描拓扑序 for (auto e : topoOrder) { // 对于x的每个邻接点 for (auto x : rode[e]) { // 因为要保证节点 x.y 之前的每个节点都处理完 // 所以找一个最晚完成的 if (Earliest[x.y] < Earliest[e] + x.weight) { // x.y 的时间 = y的一个入点e + e->e.y 的权重 Earliest[x.y] = Earliest[e] + x.weight; } } } // 最后一个节点的最早完成时间就是路径长度 res = Earliest[topoOrder[topoOrder.size() - 1]]; // 最晚开始时间默认大一点 因为一共就是res嘛 那就 res咯 fill(Latest.begin(), Latest.end(), Earliest[topoOrder.size() - 1]); // 最晚开始时间得从结尾往源点搜索 reverse(topoOrder.begin(), topoOrder.end()); // 一样是访问邻接点 不过这次的反着的 for (auto e : topoOrder) { for (auto x : Rrode[e]) { // 最晚开始时间是当前节点x的最早开始时间 - x->x.y的路径 // 要最小的 if (Latest[x.y] > Latest[x.x] - x.weight) { Latest[x.y] = Latest[x.x] - x.weight; } } } // 找关键路径 for (int i = 0; i < N; i++) { for (auto e : rode[i]) { // e.y的最晚开始时间 - e.x的最早开始时间 - e.x->e.y的权重 // Delay 就是存的x节点和y节点之间的空余 // e是边x->y Delay.push_back({e, Latest[e.y] - Earliest[e.x] - e.weight}); } } for (auto e : Delay) { // 空余为0的关键路径 if (e.d == 0) { cout << e.e.x << "->" << e.e.y << " : " << e.e.weight << endl; } } return res; } int main() { cin >> N >> M; rode.resize(N + 5); Rrode.resize(N + 5); vis.resize(N + 5); Earliest.resize(N + 5); Latest.resize(N + 5); while (M--) { int x, y, d; cin >> x >> y >> d; rode[x].push_back({x, y, d}); Rrode[x].push_back({y, x, d}); } if (TopSort()) { for (auto e : topoOrder) { cout << e << ' '; } cout << endl; cout << CriticalPath(); } return 0; } /* 9 12 0 1 6 0 2 4 0 3 5 1 4 1 2 4 1 3 5 2 4 6 9 4 7 7 5 4 0 5 7 4 6 8 2 7 8 4 8 6 7 4 1 2 5 3 0 0->1 : 6 0->3 : 5 1->4 : 1 3->5 : 2 4->6 : 9 4->7 : 7 5->4 : 0 6->8 : 2 7->8 : 4 18 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
- 82
- 83
- 84
- 85
- 86
- 87
- 88
- 89
- 90
- 91
- 92
- 93
- 94
- 95
- 96
- 97
- 98
- 99
- 100
- 101
- 102
- 103
- 104
- 105
- 106
- 107
- 108
- 109
- 110
- 111
- 112
- 113
- 114
- 115
- 116
- 117
- 118
- 119
- 120
- 121
- 122
- 123
- 124
- 125
- 126
- 127
- 128
- 129
- 130
- 131
- 132
- 133
- 134
- 135
- 136
- 137
- 138
- 139
- 140
- 141
- 142
- 143
- 144
- 145
- 146
- 147
- 148
- 149
- 150
- 151
- 152
- 153
- 154
- 155
- 156
- 157
- 158
- 159
- 160
- 161
- 162
- 163
- 164
- 165
- 166
- 167
- 168
- 169
- 170
- 171
- 172
- 173
- 174
- 175
- 176
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46667
推荐阅读

相关标签

