
热门标签
热门文章
- 1如何将抖音API应用于抖音视频的录制和上传
- 2git安装步骤
- 3【IDEA】idea 一直scanning files to index的四种解决方法_idea 正在扫描要建立索引的文件
- 4一文带你安装opencv和常用库(保姆级教程少走80%的弯路)_opencv安装教程
- 5Android stdio 无法新建或打开AIDL文件(解决方法)_android studio 找不到aidl
- 6Tool-X 工具汇总
- 7Android 为图片加图片水印和文字水印. 复制即用,阅读即懂_android createwatermaskrightbottom
- 8安卓ADB实操教程:以三星Galaxy S10为例
- 9Autolabelimg自动标注工具_labelimg的原理
- 10AI存在信任问题,区块链能提供帮助吗?
当前位置: article > 正文
STM32基于hal库的智能小车—超声波避障_stm32超声波避障小车
作者:程序自动化专家 | 2024-01-30 12:01:02
赞
踩
stm32超声波避障小车
材料:
(1)stm32f407zgt6最小系统开发板
(2)l298n电机驱动模块1个
(3)四个电机
(4)超声波模块
一、组装
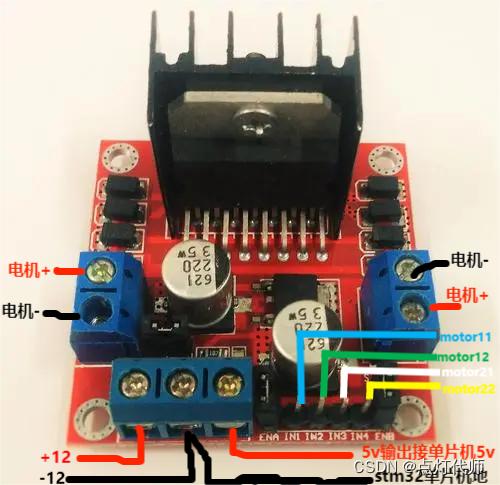
(1)L298N电机驱动模块与stm32开发板接线如下图:
(2)超声波模块接线:
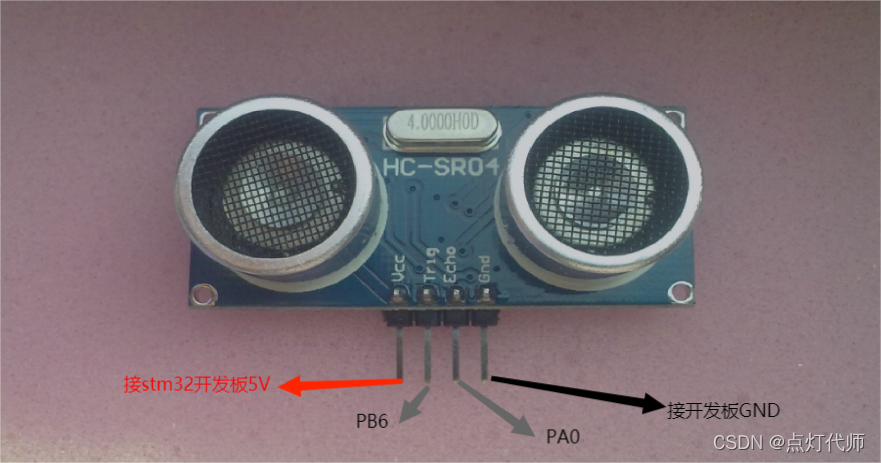
说明: VCC接stm32开发板的3.3v~5v,GND接stm32开发板的GND,Trlg接单片机PB6 、Echo接单片机PA0.
二、主要程序
1、STM32CUBEMX配置如下:
(1)引脚配置:
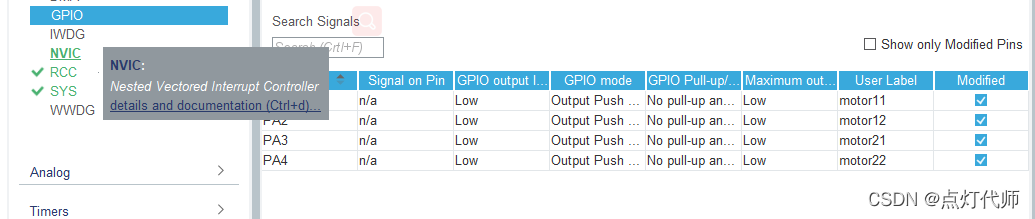
说明:
1)定义2个电机的引脚,都是GPIOB
2)motor11和motor12分别为电机(1)的两个引脚
3)motor21和motor22分别为电机(2)的两个引脚
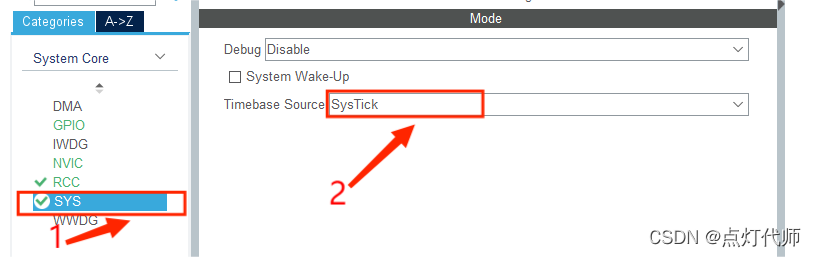
(2)配置RCC时钟:
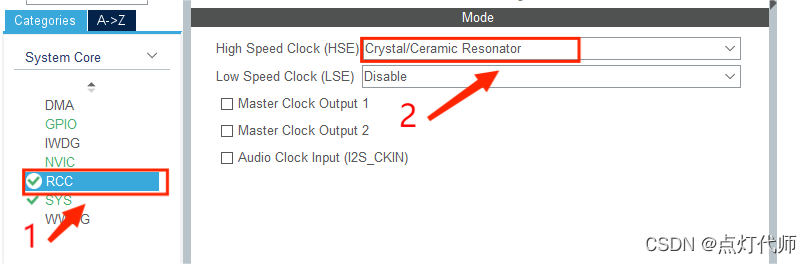
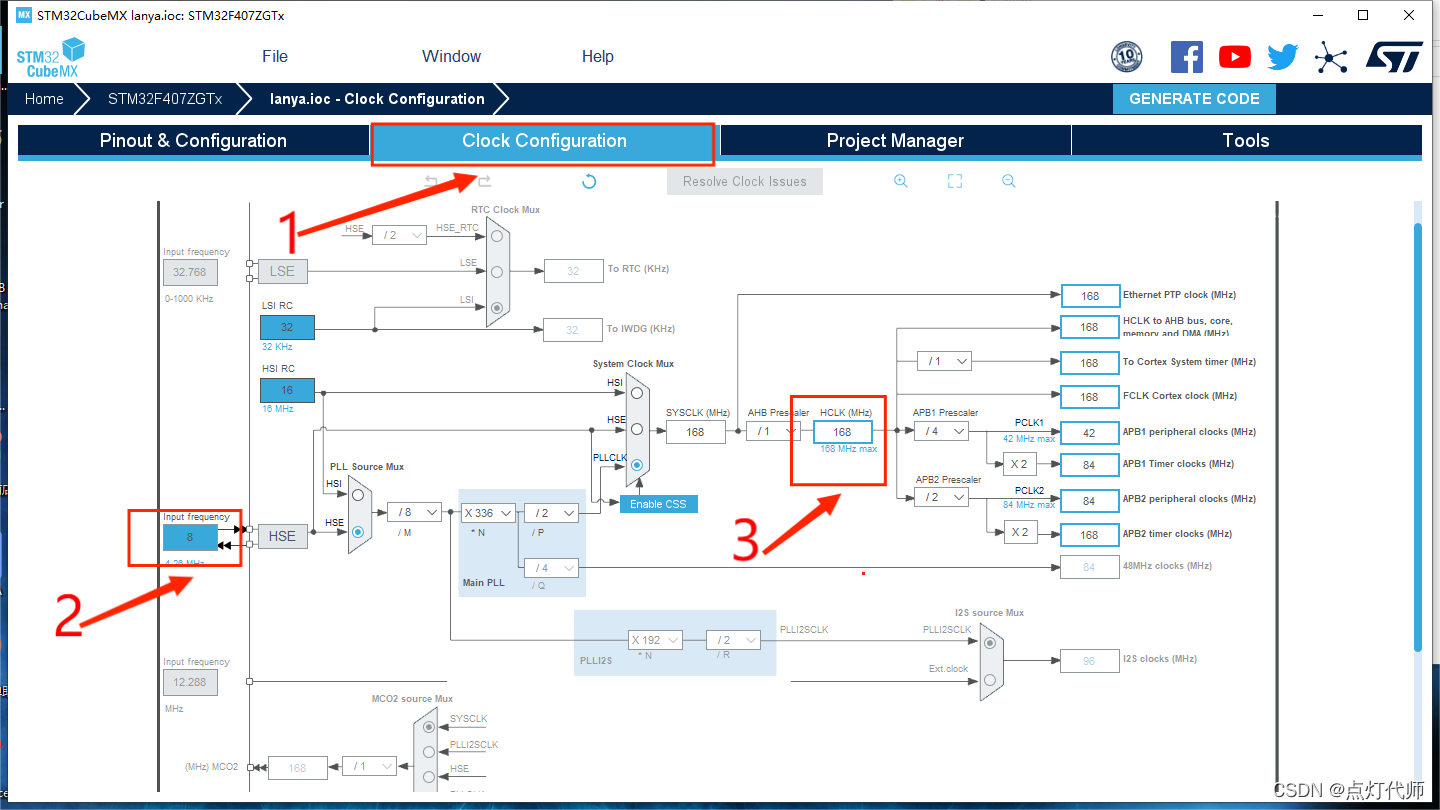
(3) 时钟的配置:
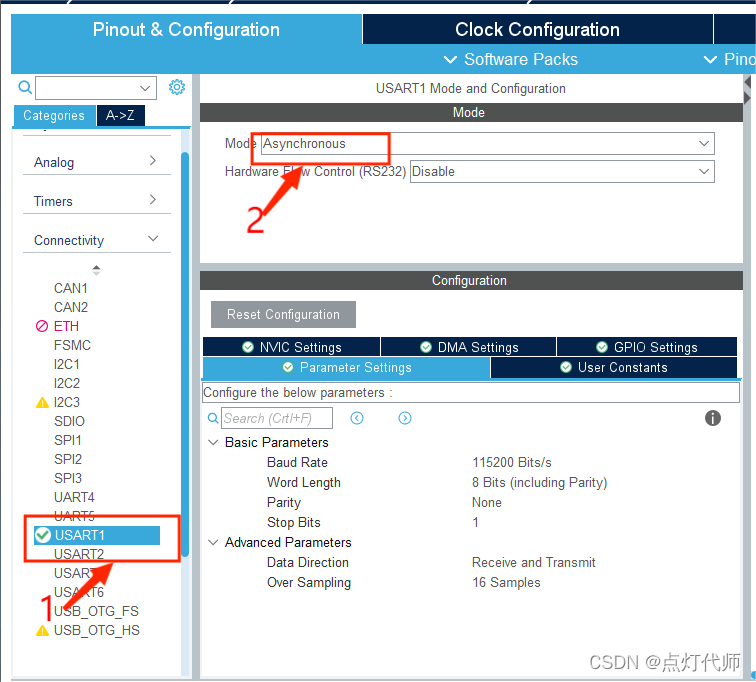
(4)UART配置:
1)选择所需UART
2)选择Mode为异步通讯方式(常用)
3)设置基础参数:波特率为115200 Bits/s;传输数据长度为8 Bit;奇偶检验无;停止位1;接收和发送都使能 。
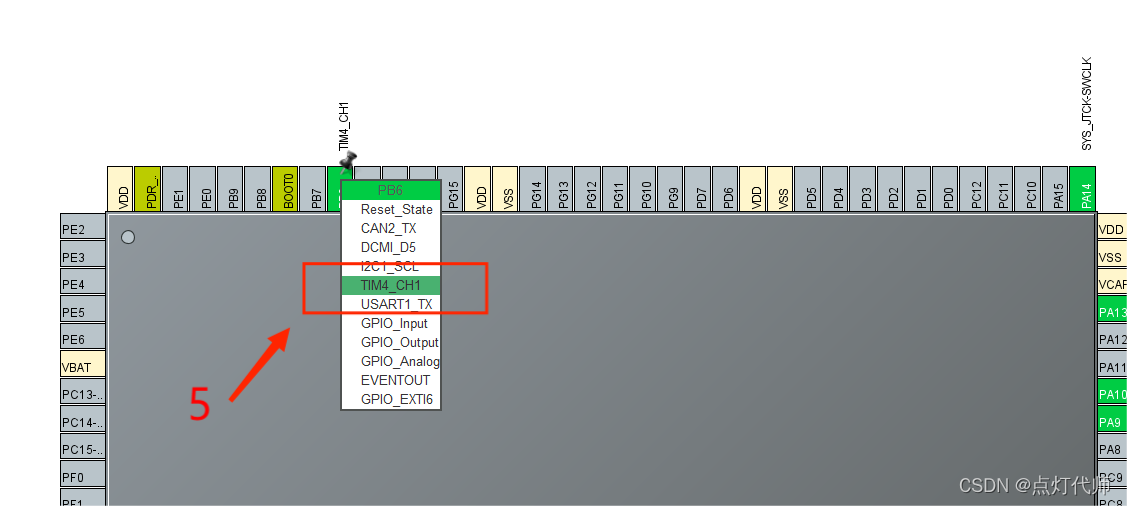
注意 CubeMX默认打开的引脚确实为最常用的引脚,但有时与电路板并不相符。
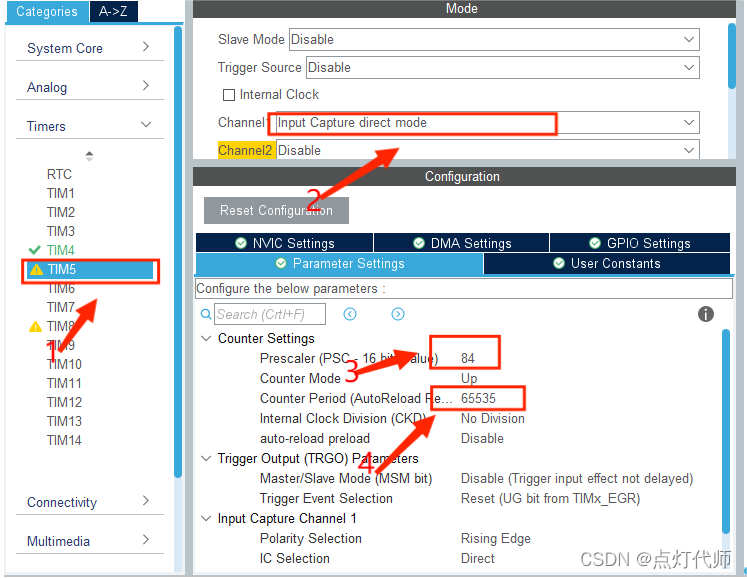
(4)预分频、分频和占空比配置:
TIM4配置 :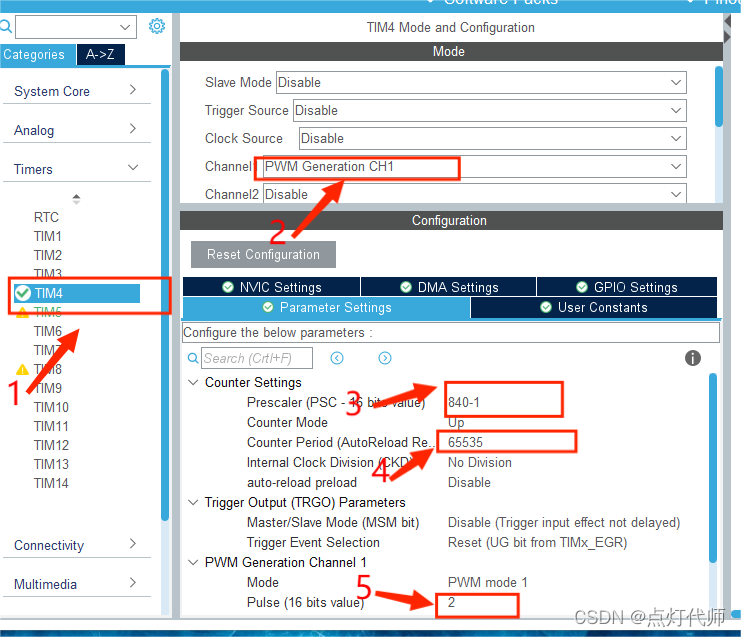
TIM5配置:
三、程序
main.c
- /* USER CODE BEGIN Header */
- /**
- ******************************************************************************
- * @file : main.c
- * @brief : Main program body
- ******************************************************************************
- * @attention
- *
- * <h2><center>© Copyright (c) 2021 STMicroelectronics.
- * All rights reserved.</center></h2>
- *
- * This software component is licensed by ST under BSD 3-Clause license,
- * the "License"; You may not use this file except in compliance with the
- * License. You may obtain a copy of the License at:
- * opensource.org/licenses/BSD-3-Clause
- *
- ******************************************************************************
- */
- /* USER CODE END Header */
- /* Includes ------------------------------------------------------------------*/
- #include "main.h"
- #include "tim.h"
- #include "usart.h"
- #include "gpio.h"
-
- /* Private includes ----------------------------------------------------------*/
- /* USER CODE BEGIN Includes */
- #include <stdio.h>
- #include <string.h>
- #include "motor.h"
- /* USER CODE END Includes */
-
- /* Private typedef -----------------------------------------------------------*/
- /* USER CODE BEGIN PTD */
-
- /* USER CODE END PTD */
-
- /* Private define ------------------------------------------------------------*/
- /* USER CODE BEGIN PD */
- /* USER CODE END PD */
-
- /* Private macro -------------------------------------------------------------*/
- /* USER CODE BEGIN PM */
-
- /* USER CODE END PM */
-
- /* Private variables ---------------------------------------------------------*/
-
- /* USER CODE BEGIN PV */
- uint8_t isCapUp=1;
- uint16_t valueUp=0;
- uint16_t valueDown=0;
- uint16_t width=0;
- uint8_t updateCount=0;
- uint8_t echoFlag=0;
- /* USER CODE END PV */
-
- /* Private function prototypes -----------------------------------------------*/
- void SystemClock_Config(void);
- /* USER CODE BEGIN PFP */
-
- /* USER CODE END PFP */
-
- /* Private user code ---------------------------------------------------------*/
- /* USER CODE BEGIN 0 */
- void HAL_TIM_IC_CaptureCallback(TIM_HandleTypeDef *htim)
- {
- if(isCapUp )
- {
- valueUp =HAL_TIM_ReadCapturedValue (htim,TIM_CHANNEL_1 );
- __HAL_TIM_SET_CAPTUREPOLARITY (htim,TIM_CHANNEL_1 ,TIM_ICPOLARITY_FALLING );
- isCapUp =0;
- }
- else
- {
- valueDown = HAL_TIM_ReadCapturedValue (htim,TIM_CHANNEL_1 );
- __HAL_TIM_SET_CAPTUREPOLARITY (htim,TIM_CHANNEL_1 ,TIM_ICPOLARITY_RISING );
- isCapUp =1;
- width =valueDown + updateCount*65535 - valueUp ;
- echoFlag=1;
- }
-
- }
-
- void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
- {
- updateCount++;
- }
-
- uint32_t vidth2dist(uint16_t width)
- {
- return width*75/1000;//测距离公式
- }
- /* USER CODE END 0 */
-
- /**
- * @brief The application entry point.
- * @retval int
- */
- int main(void)
- {
- /* USER CODE BEGIN 1 */
- uint32_t dist=0;
- uint32_t tick=0;
- char printString[64]={0};
- /* USER CODE END 1 */
-
- /* MCU Configuration--------------------------------------------------------*/
-
- /* Reset of all peripherals, Initializes the Flash interface and the Systick. */
- HAL_Init();
-
- /* USER CODE BEGIN Init */
-
- /* USER CODE END Init */
-
- /* Configure the system clock */
- SystemClock_Config();
-
- /* USER CODE BEGIN SysInit */
-
- /* USER CODE END SysInit */
-
- /* Initialize all configured peripherals */
- MX_GPIO_Init();
- MX_TIM4_Init();
- MX_TIM5_Init();
- MX_USART1_UART_Init();
- /* USER CODE BEGIN 2 */
-
- /* USER CODE END 2 */
-
- /* Infinite loop */
- /* USER CODE BEGIN WHILE */
- HAL_UART_Transmit(&huart1,"hello\r\n",7,HAL_MAX_DELAY );
- HAL_TIM_PWM_Start(&htim4 ,TIM_CHANNEL_1 );
- HAL_TIM_IC_Start_IT(&htim5,TIM_CHANNEL_1 );
- while (1)
- {
- if(echoFlag )
- {
- dist =vidth2dist(width);
- sprintf (printString,"%u\r\n",dist);
- HAL_UART_Transmit(&huart1 ,printString ,strlen (printString ),HAL_MAX_DELAY );
- echoFlag =0;
- }
- /小于25厘米
- if(dist<250)
- {
- car_go_ahead();//停止
- HAL_Delay (300);
- car_go_after();//后退
- HAL_Delay (250);
- car_go_left();//左转
- HAL_Delay (250);
- }
- else
- {
- car_go_straight();//直走
- }
- /* USER CODE END WHILE */
-
- /* USER CODE BEGIN 3 */
- }
- /* USER CODE END 3 */
- }
-
- /**
- * @brief System Clock Configuration
- * @retval None
- */
- void SystemClock_Config(void)
- {
- RCC_OscInitTypeDef RCC_OscInitStruct = {0};
- RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};
-
- /** Configure the main internal regulator output voltage
- */
- __HAL_RCC_PWR_CLK_ENABLE();
- __HAL_PWR_VOLTAGESCALING_CONFIG(PWR_REGULATOR_VOLTAGE_SCALE1);
- /** Initializes the RCC Oscillators according to the specified parameters
- * in the RCC_OscInitTypeDef structure.
- */
- RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSE;
- RCC_OscInitStruct.HSEState = RCC_HSE_ON;
- RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;
- RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSE;
- RCC_OscInitStruct.PLL.PLLM = 4;
- RCC_OscInitStruct.PLL.PLLN = 168;
- RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;
- RCC_OscInitStruct.PLL.PLLQ = 4;
- if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK)
- {
- Error_Handler();
- }
- /** Initializes the CPU, AHB and APB buses clocks
- */
- RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK
- |RCC_CLOCKTYPE_PCLK1|RCC_CLOCKTYPE_PCLK2;
- RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;
- RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;
- RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV4;
- RCC_ClkInitStruct.APB2CLKDivider = RCC_HCLK_DIV2;
-
- if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_5) != HAL_OK)
- {
- Error_Handler();
- }
- }
-
- /* USER CODE BEGIN 4 */
-
- /* USER CODE END 4 */
-
- /**
- * @brief This function is executed in case of error occurrence.
- * @retval None
- */
- void Error_Handler(void)
- {
- /* USER CODE BEGIN Error_Handler_Debug */
- /* User can add his own implementation to report the HAL error return state */
- __disable_irq();
- while (1)
- {
- }
- /* USER CODE END Error_Handler_Debug */
- }
-
- #ifdef USE_FULL_ASSERT
- /**
- * @brief Reports the name of the source file and the source line number
- * where the assert_param error has occurred.
- * @param file: pointer to the source file name
- * @param line: assert_param error line source number
- * @retval None
- */
- void assert_failed(uint8_t *file, uint32_t line)
- {
- /* USER CODE BEGIN 6 */
- /* User can add his own implementation to report the file name and line number,
- ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) */
- /* USER CODE END 6 */
- }
- #endif /* USE_FULL_ASSERT */
-
- /************************ (C) COPYRIGHT STMicroelectronics *****END OF FILE****/

电机程序:
motor.c
- #include "motor.h"
-
- //前进
- void car_go_straight(void)
- {
- HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
- HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
-
- HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
- HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
- }
-
- //右转
- void car_go_right(void)
- {
- HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_SET);
- HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
-
- HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
-
-
- }
-
- //左转
- void car_go_left(void)
- {
- HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
-
- HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_SET);
- HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
-
- }
-
-
- //停止
- void car_go_ahead(void)
- {
- HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_RESET);
-
- HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_RESET);
-
- }
-
-
- //后退
- void car_go_after(void)
- {
- HAL_GPIO_WritePin(motor11_GPIO_Port,motor11_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor12_GPIO_Port,motor12_Pin,GPIO_PIN_SET);
-
- HAL_GPIO_WritePin(motor21_GPIO_Port,motor21_Pin,GPIO_PIN_RESET);
- HAL_GPIO_WritePin(motor22_GPIO_Port,motor22_Pin,GPIO_PIN_SET);
-
- }
motor.h
- #ifndef __MOTOR_H_
- #define __MOTOR_H_
-
- #include "main.h"
-
- void car_go_straight(void);
- void car_go_right(void);
- void car_go_left(void);
- void car_go_ahead(void);
- void car_go_after(void);
-
- #endif
-
————————————————
版权声明:本文为CSDN博主「点灯代师」的原创文章,遵循CC 4.0 BY-SA版权协议,转载请附上原文出处链接及本声明。
原文链接:https://blog.csdn.net/weixin_65866701/article/details/122180377
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/article/detail/46297
推荐阅读




相关标签

