
热门标签
热门文章
- 1华为OD机试 - 游戏分组/王者荣耀 (Java 2024年C卷D卷)_华为od机试真题-游戏分组java
- 2解惑深度学习中的困惑度Perplexity_困惑度计算公式
- 3经典教材--C语言程序设计(第五版)pdf
- 4【端侧AI最佳实践】基于 Arm 虚拟硬件和语音识别接入 Kimi AI 大模型实现智能语音交互新体验_kimi语音识别
- 5部分计算机会议和期刊论文的下载方法_acm论文下载
- 6springer latex模板参考文献不显示_this is bibtex, version 0.99d (tex live 2024) the
- 7理论+实操:docker入门初体验,申请阿里镜像加速器_阿里云docker镜像加速申请
- 8ChatALL:发现最佳答案的神奇AI机器人!
- 9terminate called after throwing an instance of ‘stdbad_alloc‘问题原因与解决
- 10技术总监的校招之旅——分享校招全攻略指南(万字长文)_校园招聘 对校友说的话
当前位置: article > 正文
pid调试_pid速度环怎么调
作者:黑客灵魂 | 2024-08-04 21:53:19
赞
踩
pid速度环怎么调
PID
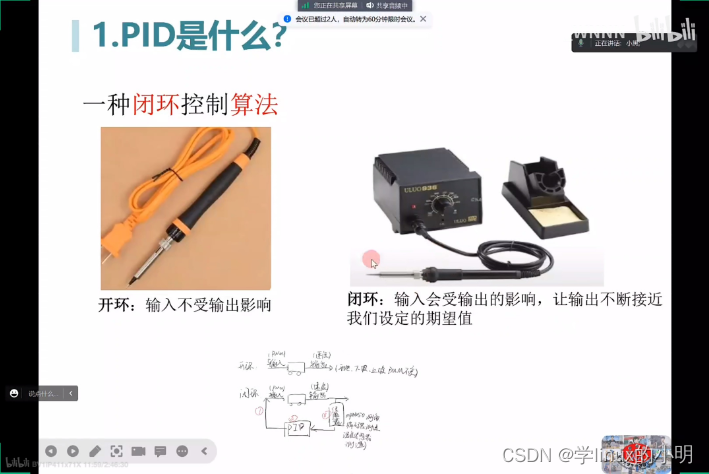
一、PID是什么?
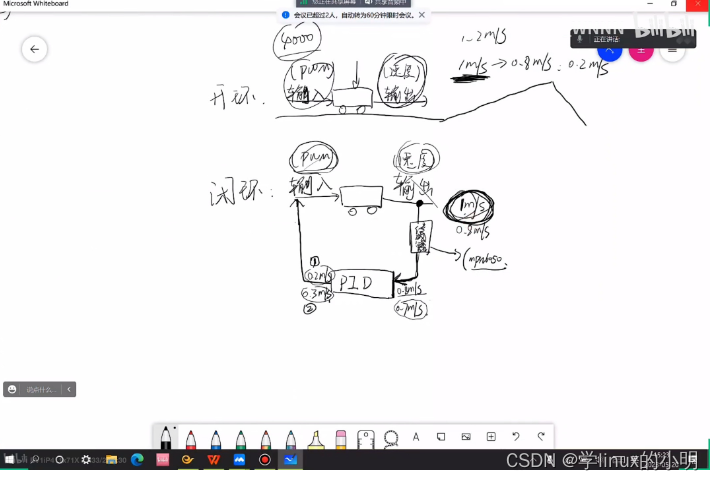
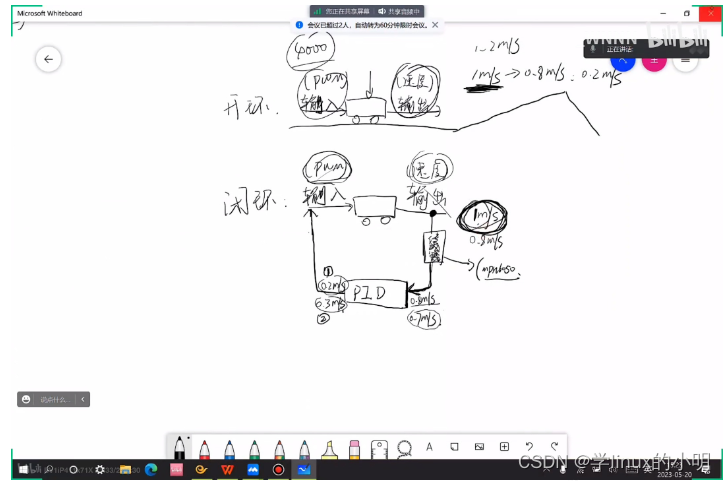
1.开环和闭环
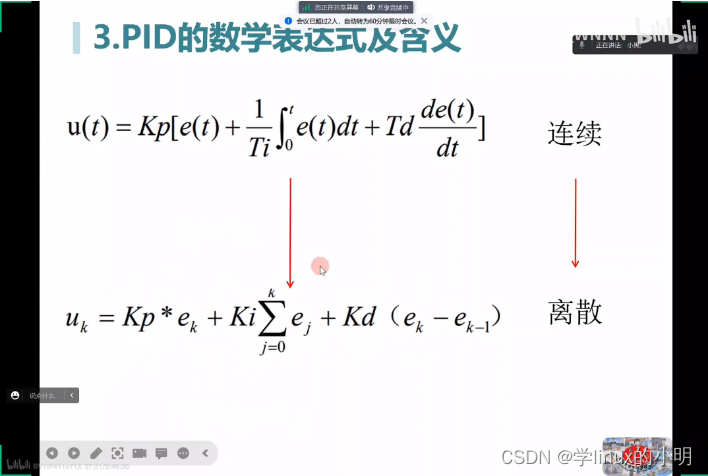
二、PID的数学表达式和含义
1.从连续到离散的转换
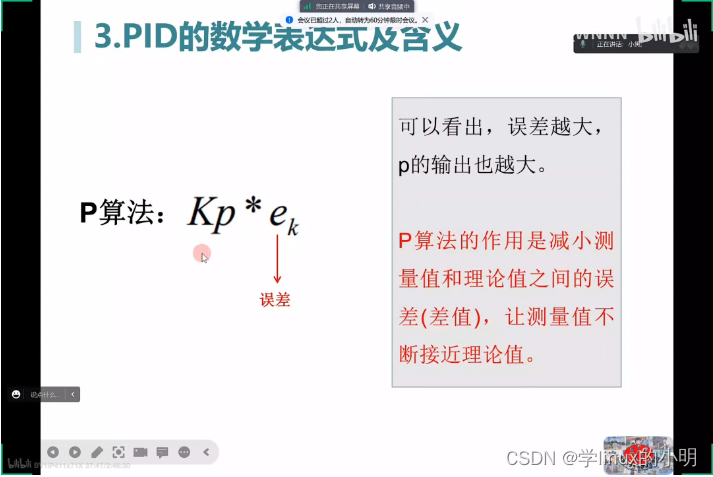
2.P算法含义和作用讲解(比例项)
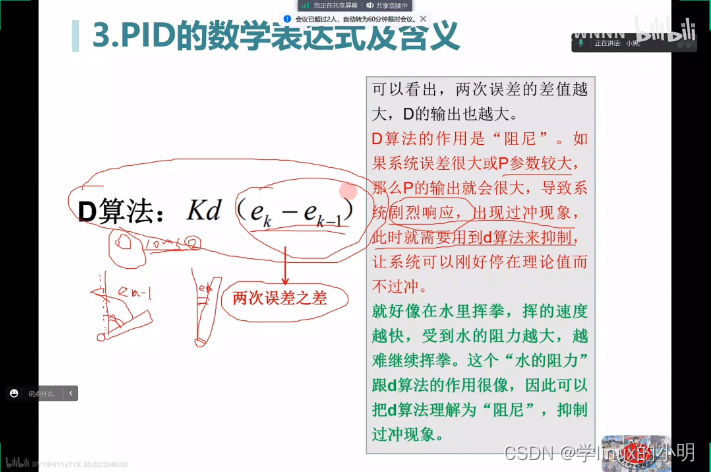
3.D算法含义和作用讲解(微分项)
“阻尼”系统响应速度越快,抑制越明显(小车摆动越明显,抑制越明显),响应越慢,抑制越微弱
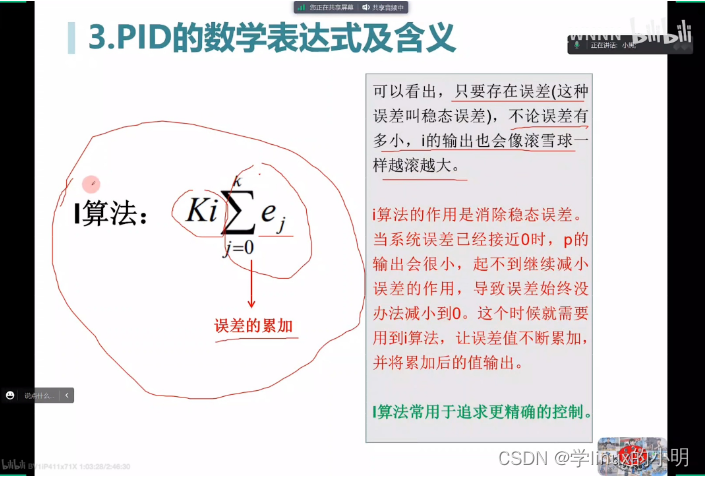
4.I算法含义和作用讲解(积分项)
消除稳态误差
有时候加入i算法系统,会不太稳定。所以没有特别需要的话,pd就可以控制了
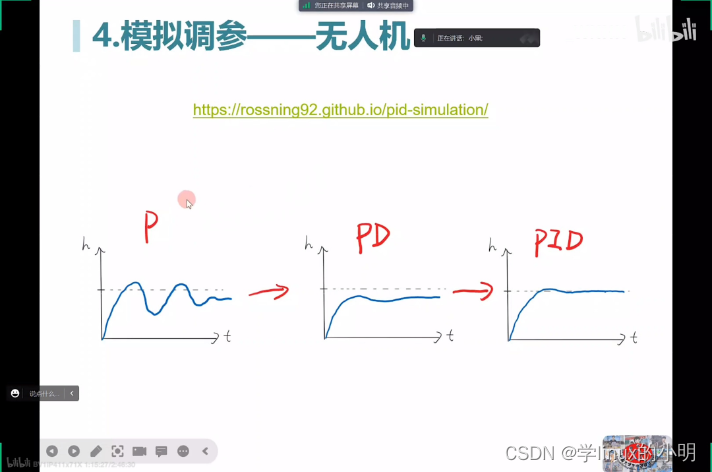
三、模拟调参 --无人机
1.从模拟调参中理解P、I和D的含义和作用
PID曲线图
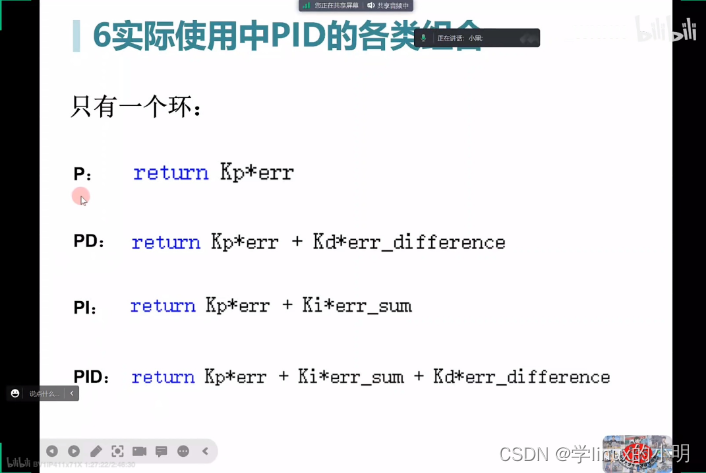
四、实际使用中PID的各类组合
1.只有一个环情况
比如直立环
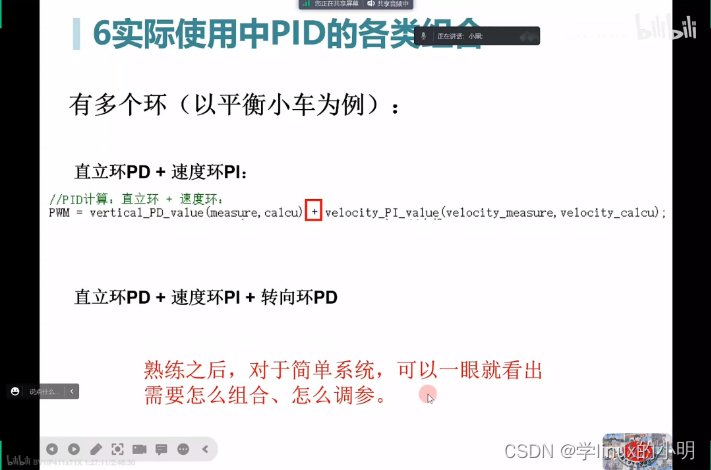
2.多个环情况
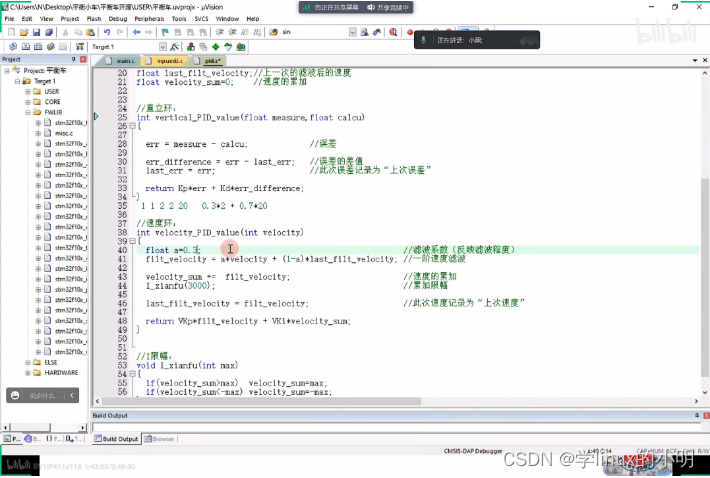
五、平衡小车PID
1.代码讲解
2.三个容易踩的坑
1.时间间隔要短
2.时间间隔要一样
3.Pid读取角度和计算要放在一起
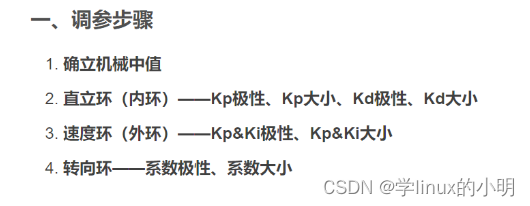
七、调参流程和方法讲解
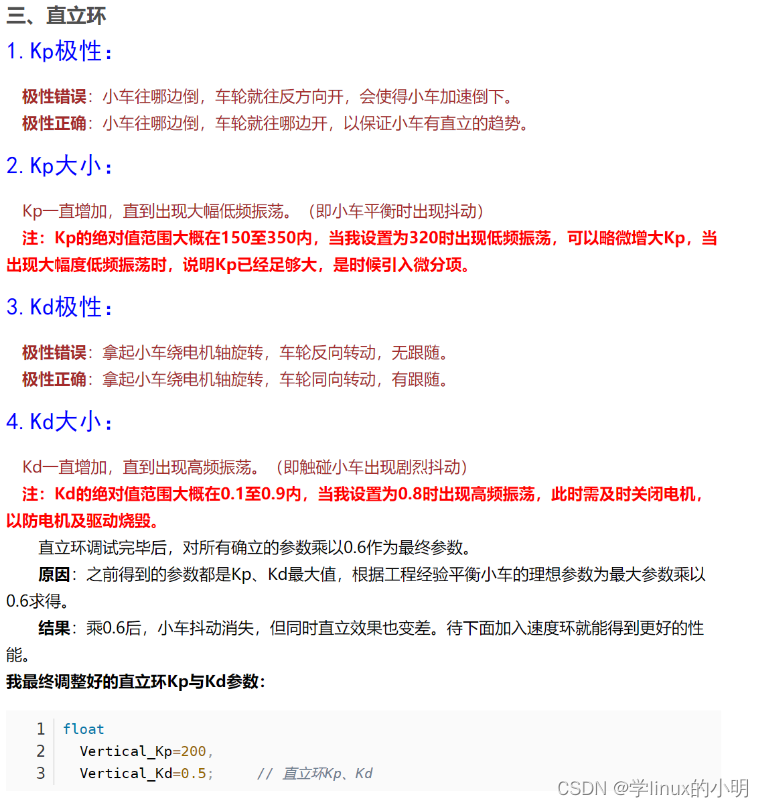
1.先调直立环(PD)
-
先调极性->Kp ;(前提:先将D,以及后面的速度环置0)
-
设定一个p值,观察平衡小车,摆动(一般是摆动3.4下后,就倒了)
-
改变P值,直到小车大幅度低频振荡(相比于D),再增加P值,小车大幅度振荡频率也很难改变,停止增加p值
-
当振荡处于中等偏上时候,取此刻P值
-
然后加入D ,发现小车振荡减小,直到小幅度高频振荡(别以为这个时候就结束了)
-
保险起见,继续加,发现小车没什么变换,取D
-
观察抽搐2秒,赶紧关电机,否则容易烧驱动芯片
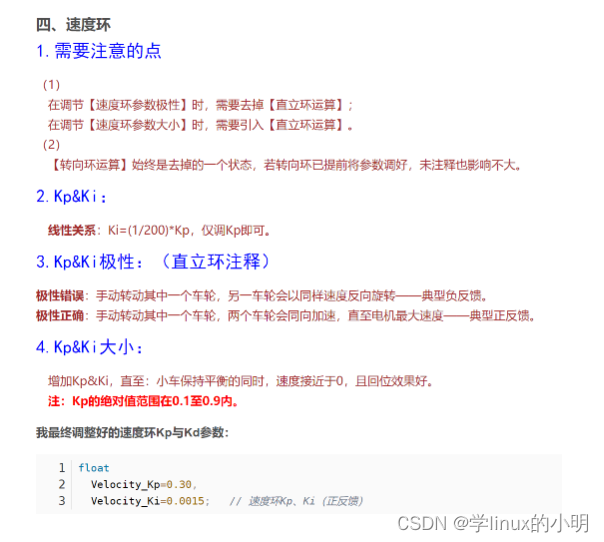
2.再调速度环(PI)
-
经验:将第一步的Kp和Kd同时乘以0.6,因为速度环是给直立环+Buff的,否则抽搐更快
-
同第一步,先调极性,完事后,可以左右摆渡,轮子会动
-
继续加大参数,小车会平衡,结束
3.最后转向环(PD)
纯P控制,P从0往上加,直到效果满意为止
八、调参流程2
九、串级PID调参步骤(见上)
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/黑客灵魂/article/detail/929611
推荐阅读
相关标签

