
- 1企业—Docker容器之docker安全_mem限额
- 2ERROR: Could not find a version that satisfies the requirement pytest-runner (from versions: none)
- 3Android 修改home下的文件夹名称为英文_手机文件怎么改英文路径格式
- 4自然语言处理(NLP)——前馈网络_前馈神经网络在语言加工中的应用
- 5关闭和修改SpringBoot启动Logo_springboot启动只显示logo
- 6金仓数据库KingbaseES PIPELINE子句详解_kingbase 管道函数
- 7AIGC专题:Sora展示文生视频能力惊艳,重视内容生产工具层革新
- 8使用又拍云让网站实现https访问_又拍云访问例子
- 9Taro和uniapp的区别?_taro和uniapp对比
- 10Mac系统下PHP7.2和Yaf框架安装_设置yaf 环境变量
【代码随想录】【算法训练营】【第39天】 [62]不同路径 [63]不同路径II [343]整数拆分 [96]不同的二叉搜索树
赞
踩
前言
思路及算法思维,指路 代码随想录。
题目来自 LeetCode。
day 39,周六,坚持不住了~
题目详情
[62] 不同路径
题目描述

解题思路
前提:每次只能向下或者向右移动一步
思路:动态规划, dp[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1] 。
重点:dp数组的定义,以及 推导公式。
代码实现
C语言
动态规划dp[i][j]
动态规划 dp[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1];
// dp[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1]; int uniquePaths(int m, int n) { int dp[m][n]; // 动态数组初始化 for (int i = 0; i < m; i++) { dp[i][0] = 1; } for (int j = 0; j < n; j++) { dp[0][j] = 1; } // 从前到后,遍历其余位置 for (int i = 1; i < m; i++) { for (int j = 1; j < n; j++) { dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; } } return dp[m - 1][n - 1]; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
动态规划dp[i]
动态规划 dp[i][j]压缩空间为dp[i], dp[i] = dp[i] + dp[i-1]
// dp[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1]; // 压缩空间为dp[i], dp[i] = dp[i] + dp[i-1] int uniquePaths(int m, int n) { int dp[n]; // 动态数组初始化 for (int j = 0; j < n; j++) { dp[j] = 1; } // 从前到后,按行更新数组 for (int i = 1; i < m; i++) { for (int j = 1; j < n; j++) { dp[j] = dp[j - 1] + dp[j]; } } return dp[n - 1]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
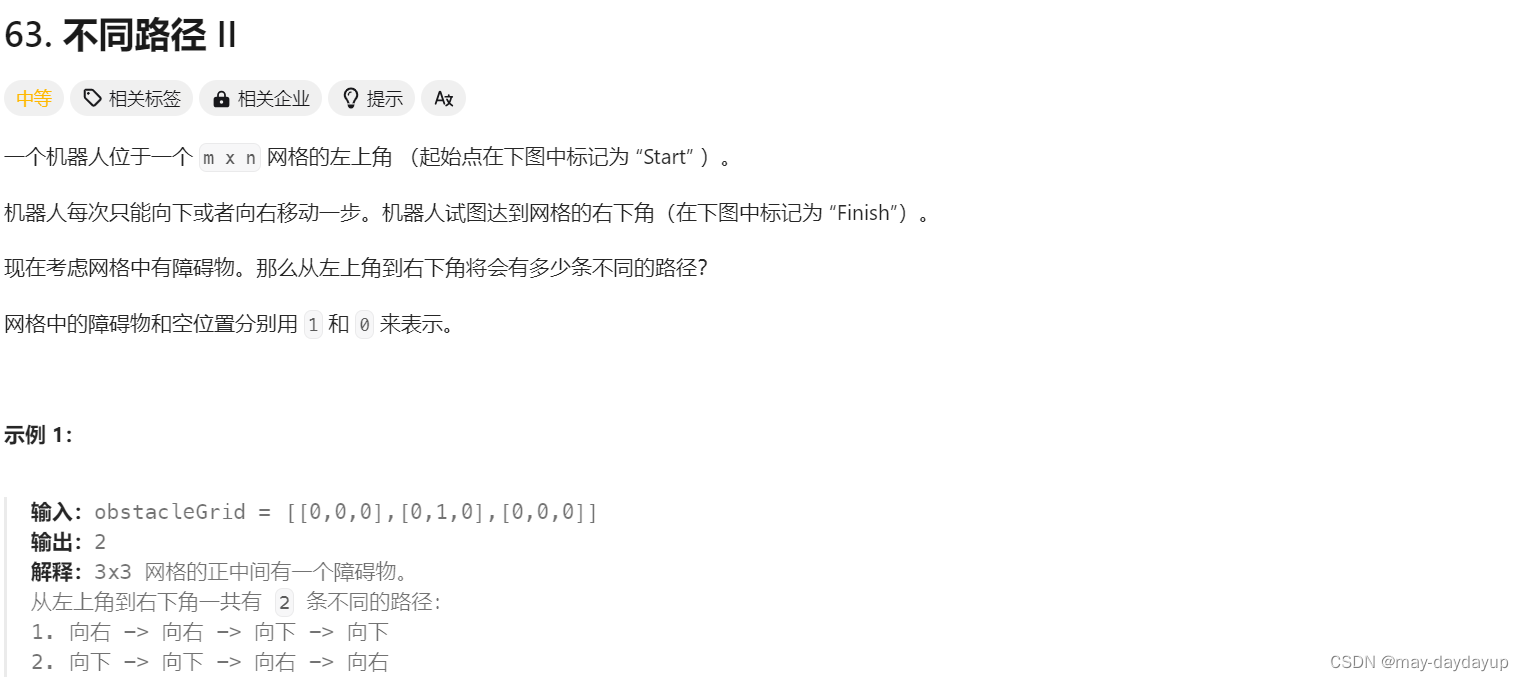
[63] 不同路径II
题目描述
解题思路
前提:每次只能向下或者向右移动一步,且可能有障碍
思路:动态规划:d[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1] 。
重点:dp数组的定义,以及 推导公式。
代码实现
C语言
动态规划dp[i][j]
动态规划:d[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1]
// d[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1] int uniquePathsWithObstacles(int** obstacleGrid, int obstacleGridSize, int* obstacleGridColSize) { //定义dp数组 int dp[obstacleGridSize][*obstacleGridColSize]; //初始化dp数组 int found = false; for (int i = 0; i < obstacleGridSize; i++) { if ((found != true) && (obstacleGrid[i][0] != 1)) { dp[i][0] = 1; } else { found = true; dp[i][0] = 0; } } found = false; for (int j = 0; j < *obstacleGridColSize; j++) { if ((found != true) && (obstacleGrid[0][j] != 1)) { dp[0][j] = 1; } else { found = true; dp[0][j] = 0; } } // 从上到下,从左到右,遍历 for (int i = 1; i < obstacleGridSize; i++) { for (int j = 1; j < *obstacleGridColSize; j++) { // 判断是否为障碍 if (obstacleGrid[i][j] != 1) { dp[i][j] = dp[i - 1][j] + dp[i][j - 1]; } else { dp[i][j] = 0; } } } return dp[obstacleGridSize - 1][*obstacleGridColSize - 1]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
动态规划dp[i]
d[i][j]压缩为d[i], dp[i] = dp[i-1] + dp[i]
// d[i][j]: 到达(i, j)位置的路径数量, dp[i][j] = dp[i-1][j] + dp[i][j-1] // 压缩为d[i], dp[i] = dp[i-1] + dp[i] int uniquePathsWithObstacles(int** obstacleGrid, int obstacleGridSize, int* obstacleGridColSize) { //定义dp数组 int dp[*obstacleGridColSize]; //初始化dp数组 int found = false; for (int j = 0; j < *obstacleGridColSize; j++) { if ((found != true) && (obstacleGrid[0][j] != 1)) { dp[j] = 1; } else { found = true; dp[j] = 0; } } // 从上到下,从左到右,遍历 for (int i = 1; i < obstacleGridSize; i++) { for (int j = 0; j < *obstacleGridColSize; j++) { // 判断是否为障碍 if (obstacleGrid[i][j] == 1) { dp[j] = 0; } else if (j > 0) { dp[j] = dp[j - 1] + dp[j]; } } } return dp[*obstacleGridColSize - 1]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
[343] 整数拆分
题目描述

解题思路
前提:拆分为 k 个 正整数 的和( k >= 2 )
思路:动态规划, dp[i]: i的最大乘积, 拆分为两数或者多数之积, d[i] = max(j*(i-j), jdp[i-j]); 遍历j时, 取各个dp[i]的最大值, 故dp[i] = max(dp[i], j(i-j), j*dp[i-j])。
重点:dp数组的定义,以及 推导公式。
代码实现
C语言
动态规划
// dp[i]: i的最大乘积, 拆分为两数或者多数之积, d[i] = max(j*(i-j), j*dp[i-j]) // 遍历j时, 取各个dp[i]的最大值 // 故dp[i] = max(dp[i], j*(i-j), j*dp[i-j]) int max(int p1, int p2) { return p1 > p2 ? p1 : p2; } int integerBreak(int n) { // 定义dp数组 int dp[n + 1]; // 初始化 for (int i = 0; i < (n + 1); i++) { dp[i] = 0; } dp[1] = 1; // 从小到大遍历整数 for (int i = 2; i <= n; i++) { for (int j = 1; j < i; j++) { dp[i] = max(dp[i], max((j * dp[i - j]), j * (i - j))); } } return dp[n]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
动态规划 优化遍历
// dp[i]: i的最大乘积, 拆分为两数或者多数之积, d[i] = max(j*(i-j), j*dp[i-j]) // 遍历j时, 取各个dp[i]的最大值 // 故dp[i] = max(dp[i], j*(i-j), j*dp[i-j]) int max(int p1, int p2) { return p1 > p2 ? p1 : p2; } int integerBreak(int n) { // 定义dp数组 int dp[n + 1]; // 初始化 for (int i = 0; i < (n + 1); i++) { dp[i] = 0; } dp[1] = 1; // 从小到大遍历整数 for (int i = 2; i <= n; i++) { // 优化遍历 for (int j = 1; j <= i / 2; j++) { dp[i] = max(dp[i], max((j * dp[i - j]), j * (i - j))); } } return dp[n]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
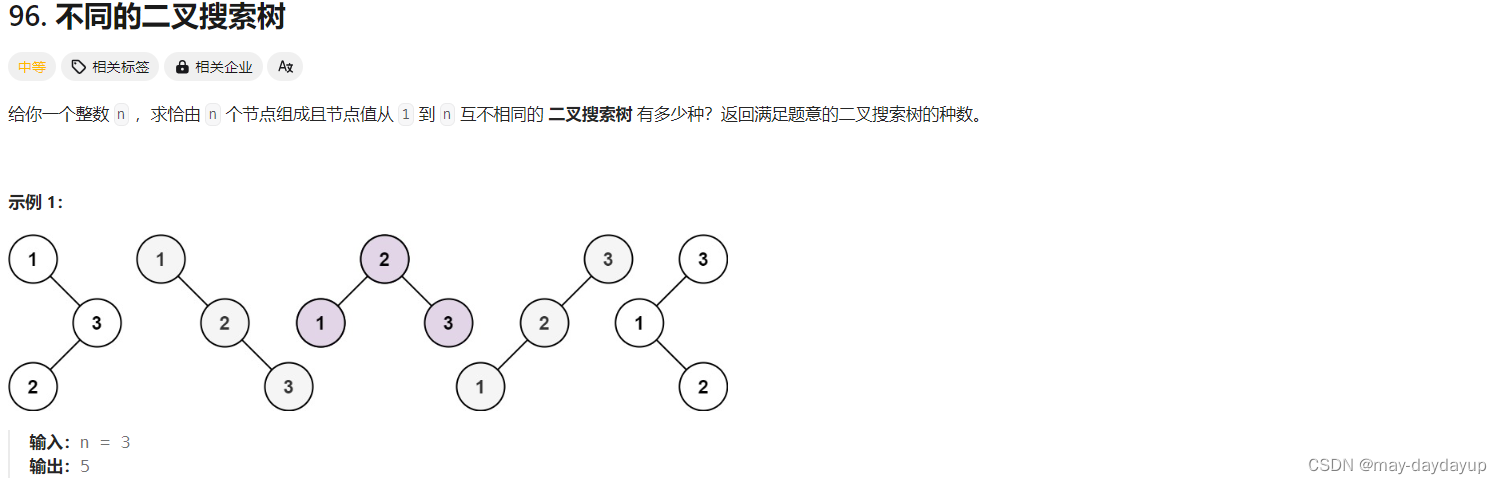
[96] 不同的二叉搜索树
题目描述
解题思路
前提:查分二叉树的形态,观察联系
思路:动态规划, dp[i]表示i个结点的二叉搜索树的种数, dp[i] += dp[j] * dp[i - j - 1],其中左子树结点数为j, 右子树结点数为i-j-1。
重点:观察二叉树结点数量之间形态的联系,dp数组的定义,以及 推导公式。
代码实现
C语言
动态规划
// dp[i]表示i个结点的二叉搜索树的种数, dp[i] += dp[j] * dp[i - j - 1] // 左子树结点数为j, 右子树结点数为i-j-1 int numTrees(int n) { // 定义dp数组 int dp[n + 1]; // 初始化 for (int i = 0; i <= n; i++) { dp[i] = 0; } dp[0] = 1; // 从小到大遍历n for (int i = 1; i <= n; i++) { for (int j = 0; j < i; j++) { dp[i] += dp[j] * dp[i - j - 1]; } } return dp[n]; }
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
今日收获
- 动态规划五步曲:确定dp数组(dp table)以及下标的含义;确定递推公式;dp数组如何初始化;确定遍历顺序;举例推导dp数组。

