
热门标签
热门文章
- 1kafka学习笔记(3)——命令行操作_kafka命令行操作
- 2期刊论文研究方法有哪些
- 3pytorch实现mutil_head attention_multi-head attention实现方式 pytorch
- 42023 华数杯(B题)最新详解!深度剖析|数学建模完整代码+建模过程全解全析_2023华数杯b题论文
- 5uni微信小程序跳入外链(以高德地图为例)_uniapp的微信小程序点击跳转外部链接
- 6Android Studio安卓原装程序打包Apk包步骤流程(全网最详细)_安卓怎么打生产包
- 7阿里云SMS服务C++ SDK编译及调试关键点记录
- 8一文弄懂Flink网络流控及反压_flink的网络流控
- 9银河麒麟v10安装前端环境(Node、vue、Electron+vite)_麒麟系统安装nodejs
- 10[256个管理学理论]004.鲶鱼效应(Catfish Effect)
当前位置: article > 正文
速腾16线激光雷达(RS-Hellos-16P)在windows与ubuntu18.04下的调试与点云数据格式转换(pointclould2-->laserscan)_速腾聚创rs-16驱动和调试工具
作者:酷酷是懒虫 | 2024-08-14 23:23:26
赞
踩
速腾聚创rs-16驱动和调试工具
目录
(6) 测试,进入cmd,使用ping命令 查看 是否与雷达连接
更改config.yaml文件的雷达类型 为 RSHELIOS_16P编辑
3.1 安装pointcloud_to_laserscan包下载源码到工作空间并编译
1.windows下调试
参考链接:win10下速腾聚创RS-Lidar-32配置教程_速腾聚创 连接教程_xiaowzf的博客-CSDN博客
1.1.设备连线(略)
1.2.设置局域网
前提:关闭所有防火墙和保护软件
(1) 点击电脑右下角,选择 网络和Internet设置
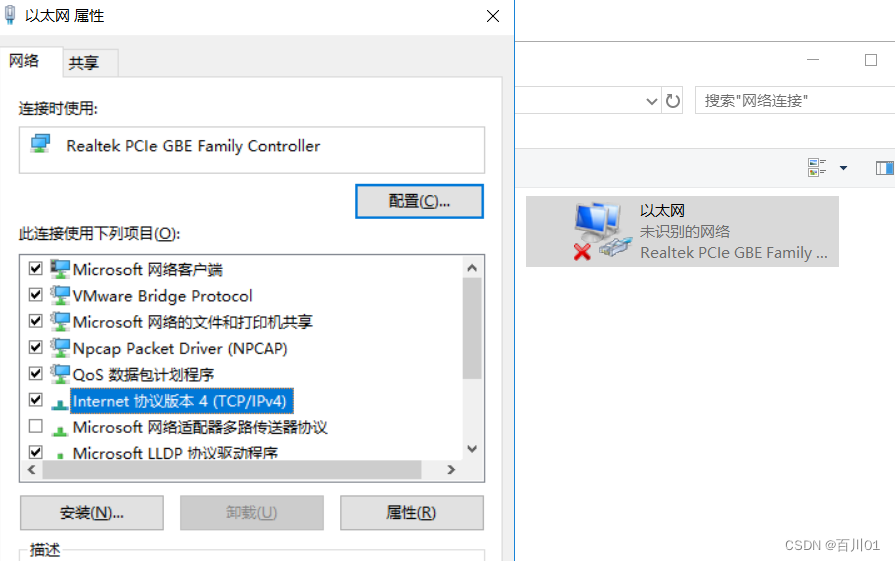
(2) 选择 更改适配器选项

(3) 点击 以太网-> 属性 -> Ipv4协议
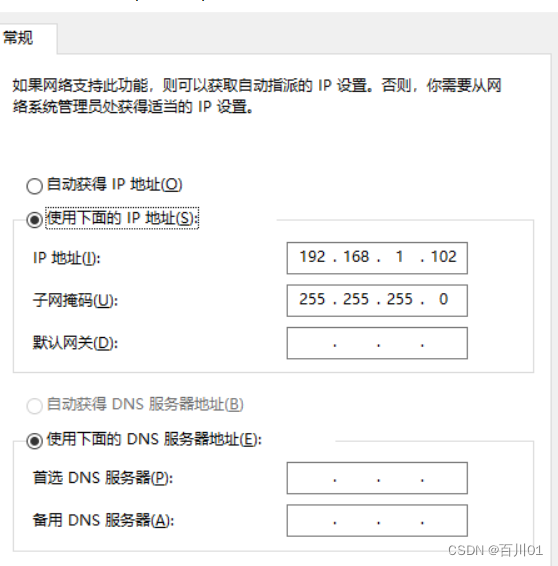
(4) 设置 静态ip
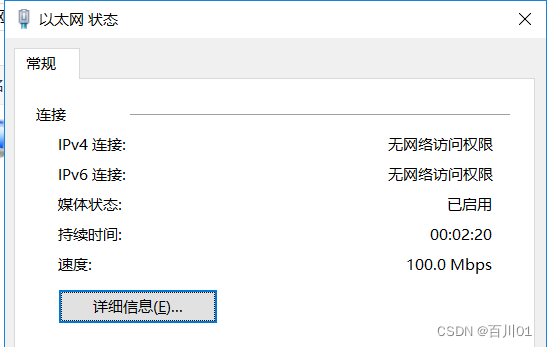
(5) 查看状态 是否为 已启用
(6) 测试,进入cmd,使用ping命令 查看 是否与雷达连接
上图结果,说明连接成功
1.3 下载雷达驱动
官网链接:资源中心 - RoboSense速腾聚创 - 自动驾驶激光雷达
官网版本太新,可能不匹配
链接:https://pan.baidu.com/s/1EPjstKLnhHmqSdVbONSM2A
提取码:1111
下载压缩包,解压路径不能有中文【例如】
![]()
1.4 以管理员权限打开
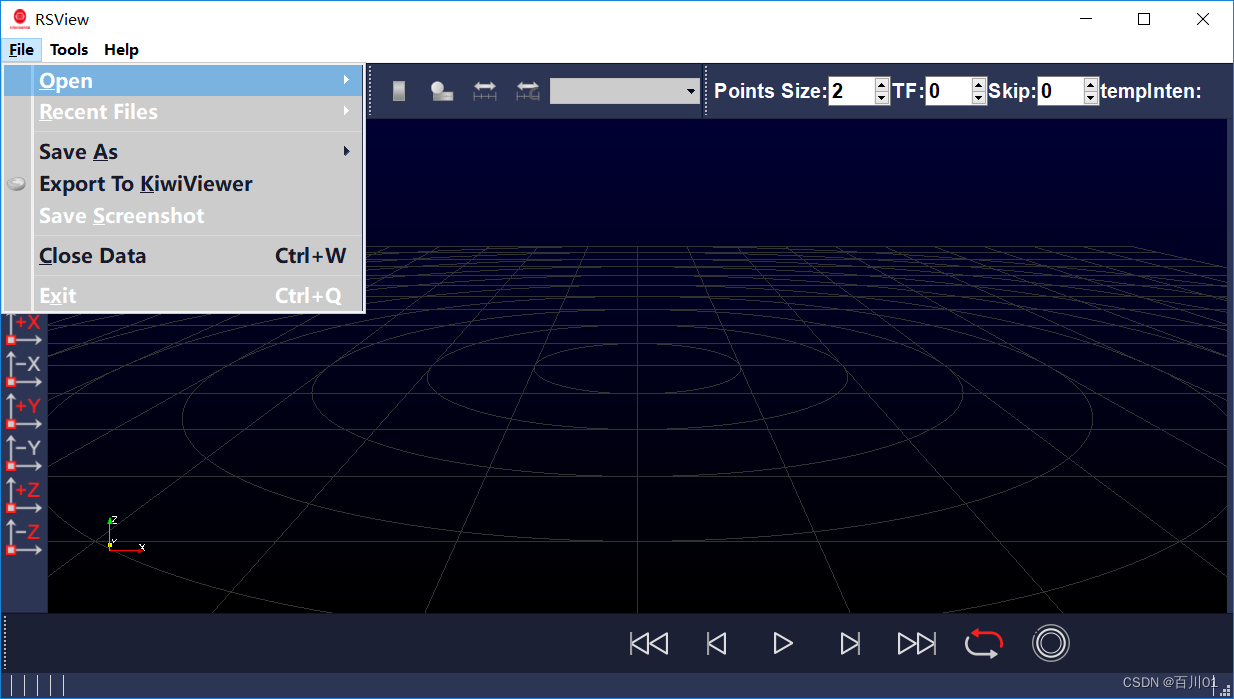
1.5 点击 Open 选择型号
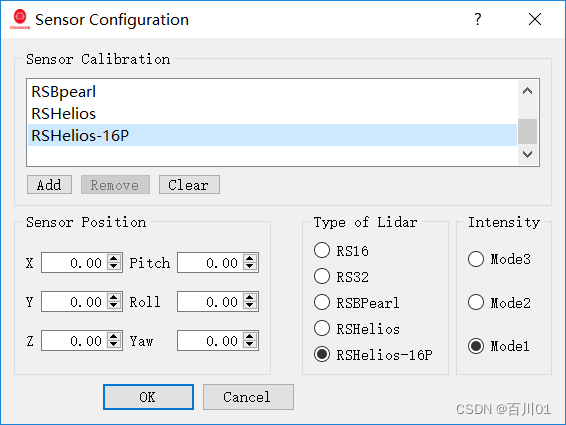
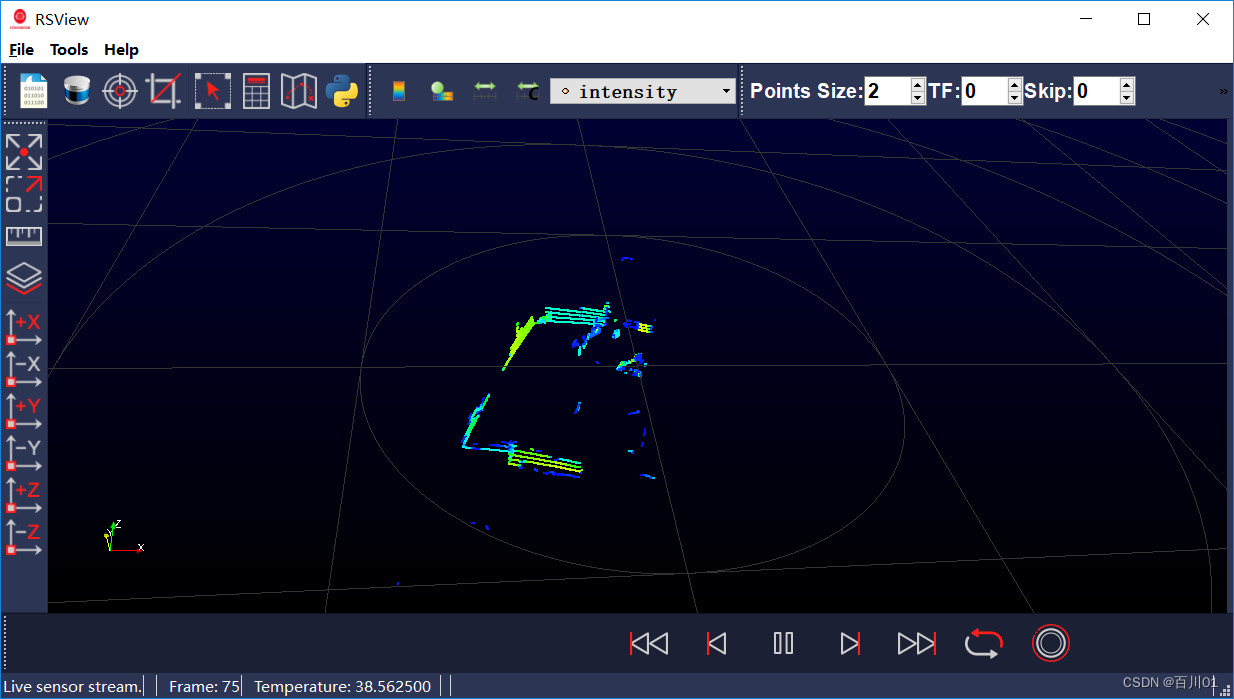
1.6 结果
2.ubuntu18.04下调试(ROS-melodic)
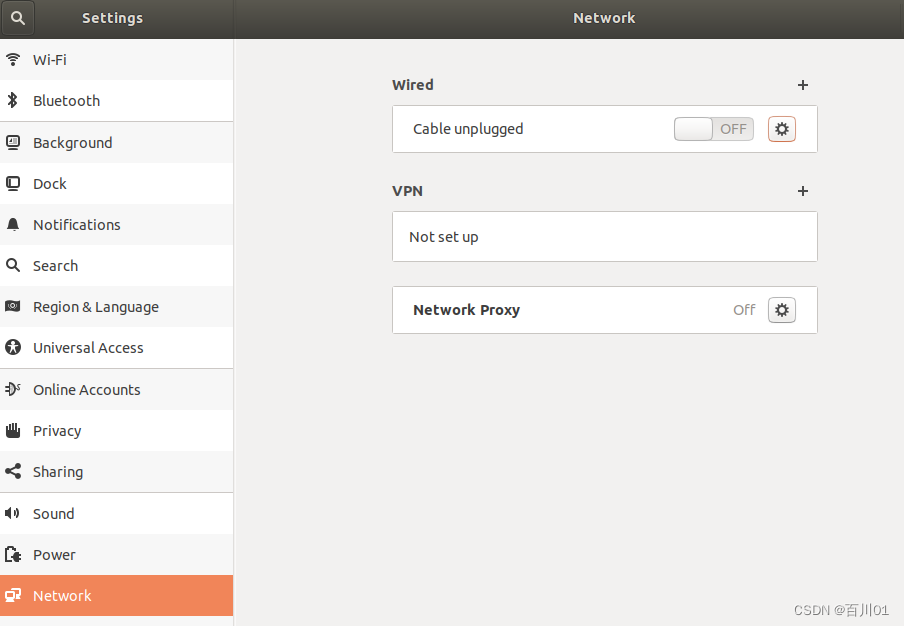
2.1进入设置界面,选择 网络->有线连接
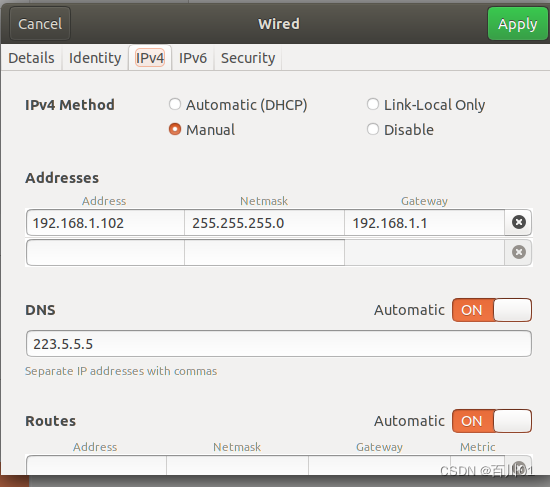
2.2 设置ip和DNS
2.3 查看是否设置成功并测试
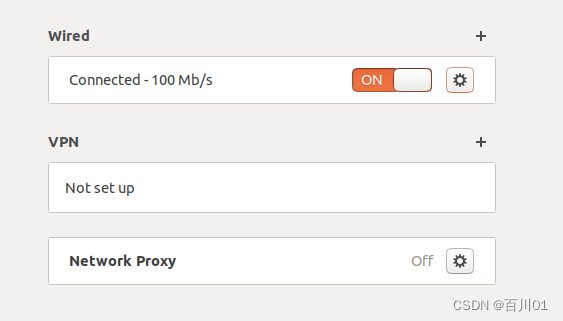
使用 ip a 查看是否修改成功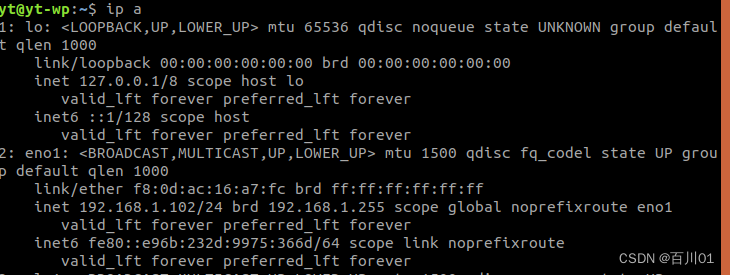
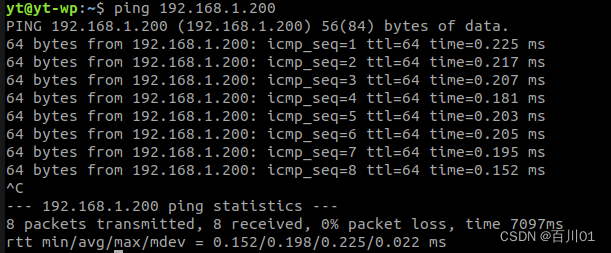
使用ping命令测试,下图结果显示 连接成功
2.4 下载驱动
官方链接:https://github.com/RoboSense-LiDAR/rslidar_sdk/tree/dev_opt
下载代码到robosense_ws空间
- mkdir -p robosense_ws/src
- cd robosense_ws/src
- git clone https://github.com/RoboSense-LiDAR/rslidar_sdk.git
- cd rslidar_sdk
- git submodule init //下载子模块
- git submodule update
更改config.yaml文件的雷达类型 为 RSHELIOS_16P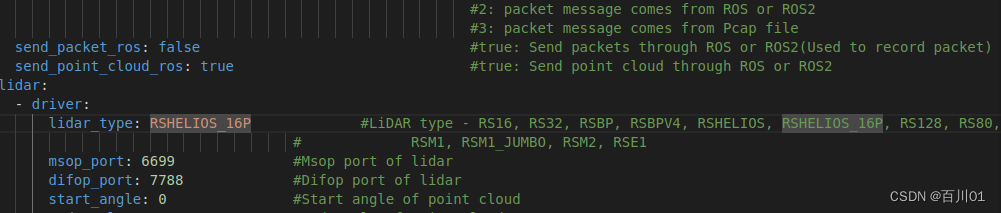
编译并执行
- cd robosense_ws
- catkin_make
- source ./devel/setup.bash
- roslaunch rslidar_sdk start.launch
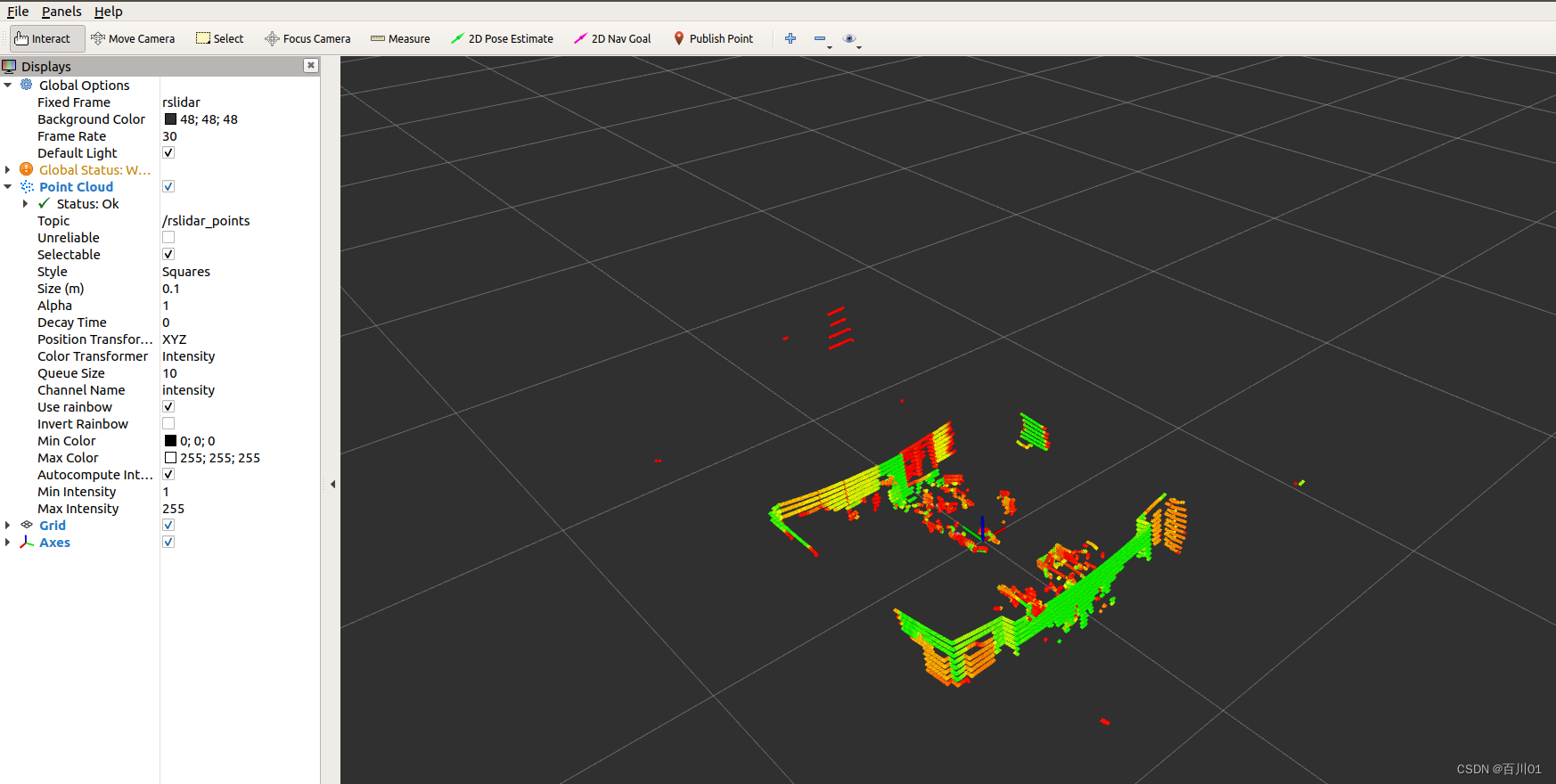
结果:
3.实现pointcloud2 转scan
参考链接:RoboSense(速腾)16线激光雷达数据进行cartographer建图的实践历程_%zoe%的博客-CSDN博客
3.1 安装pointcloud_to_laserscan包
下载源码到工作空间并编译
- cd ~/robosense_ws/src
- git clone https://github.com/BluewhaleRobot/pointcloud_to_laserscan.git
- cd ~/robosense_ws
- catkin_make
3.2 创建launch文件
使用vscode打开 robosense_ws
code robosense_ws在launch文件夹下 创建point_to_scan.launch,代码如下
- <?xml version="1.0"?>
-
- <launch>
-
- <!-- run pointcloud_to_laserscan node -->
- <node pkg="pointcloud_to_laserscan" type="pointcloud_to_laserscan_node" name="pointcloud_to_laserscan">
-
- <remap from="cloud_in" to="/rslidar_points"/>
-
- <rosparam>
- # target_frame: rslidar # Leave disabled to output scan in pointcloud frame
- transform_tolerance: 0.01
- min_height: -0.4
- max_height: 1.0
-
- angle_min: -3.1415926 # -M_PI
- angle_max: 3.1415926 # M_PI
- angle_increment: 0.003 # 0.17degree
- scan_time: 0.1
- range_min: 0.2
- range_max: 100
- use_inf: true
- inf_epsilon: 1.0
-
- # Concurrency level, affects number of pointclouds queued for processing and number of threads used
- # 0 : Detect number of cores
- # 1 : Single threaded
- # 2->inf : Parallelism level
- concurrency_level: 1
- </rosparam>
-
- </node>
-
- </launch>

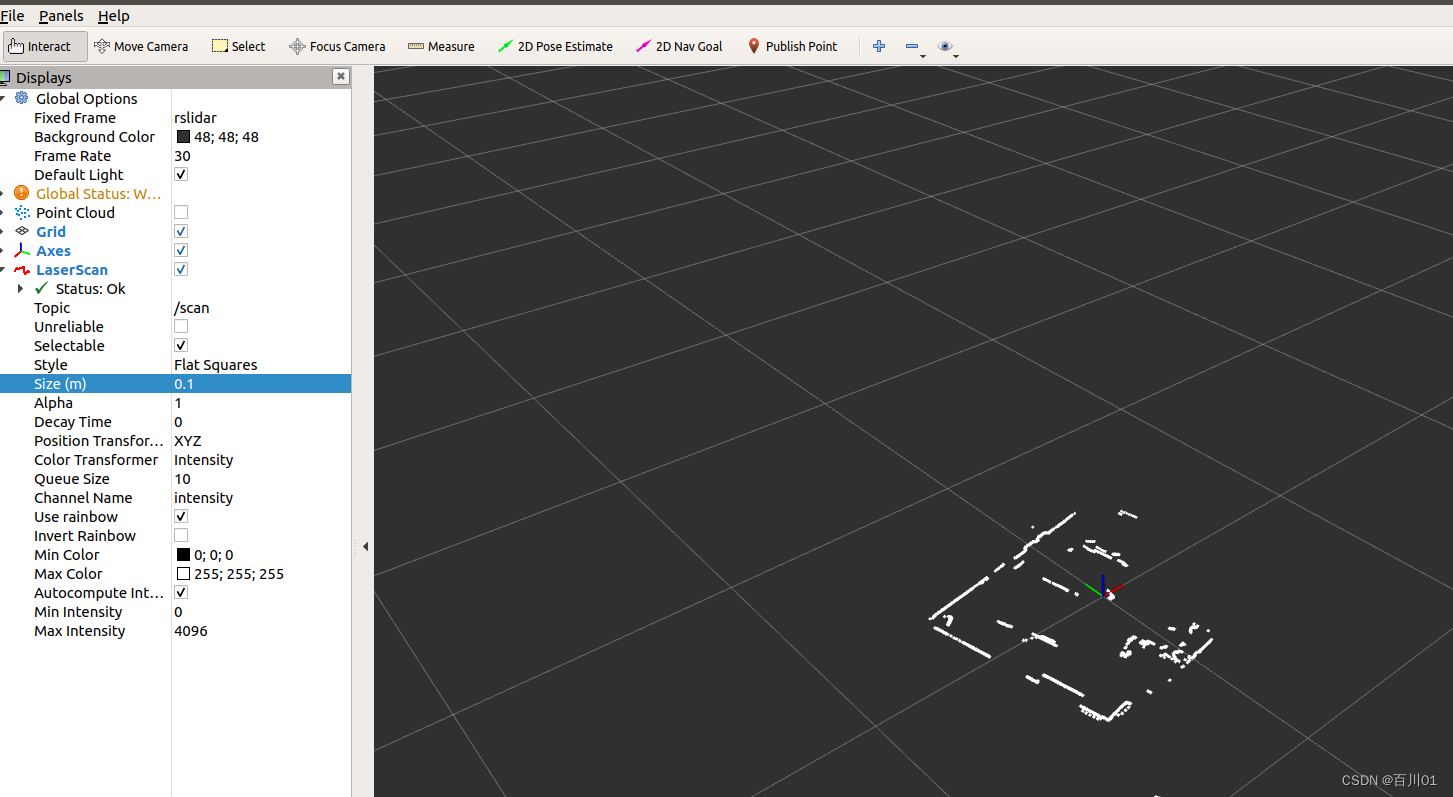
3.3 运行与使用
- cd robosense_ws
- catkin_make //编译
- source ./devel/setup.bash
-
- roslaunch rslidar_sdk start.launch
打开另外终端
- cd ~/robosense_ws
- source devel/setup.bash
- roslaunch pointcloud_to_laserscan point_to_scan.launch
3.4 结果
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/酷酷是懒虫/article/detail/981128
推荐阅读
相关标签

