
- 1PyCharm免费安装和新手使用教程_pycharm免费版
- 2Pytorch实现Seq2Seq(Attention)字符级机器翻译_nn.module 简单翻译
- 3Nginx使用SSL加密并隐藏真实地址详细教程_nginx 隐藏真实的url
- 4鼠标悬停,出现另一个元素,点击这个元素的解决方法_悬浮元素出现一个按钮
- 5Keras-5-深度学习用于文本和序列-处理文本数据_keras 预训练网络一维序列分类
- 62018android面试宝典,2024京东Android面试真题解析
- 7【VSCode】支持argparser/接受命令行参数_argparse vscode
- 8前端调取接口格式vue_前端network里的接口变成了collect,该怎样转变回正常网址
- 9人工智能程序员应该有什么职业素养?_keeping neural networks simple by minimizing the d
- 10强光环境下阴影消除算法_去除路面阴影干扰的算法
启发式路径搜索算法介绍
赞
踩
作者丨Arwin(Haowen Yu)
来源丨古月居
前言
启发式搜索(Heuristically Search)又称为有信息搜索(Informed Search),它是利用问题拥有的启发信息来引导搜索,达到减少搜索范围、降低问题复杂度的目的,这种利用启发信息的搜索过程称为启发式搜索。简单来说,就是已知起点和终点位置,寻找最佳路径。
启发式搜索
方法(Dijkstra search,Greedy Search,A* )
代价一致搜索 (Uniform Cost Search or Dijkstra search)
贪心搜索 (Greedy Search)
A星搜索 (A* Search)
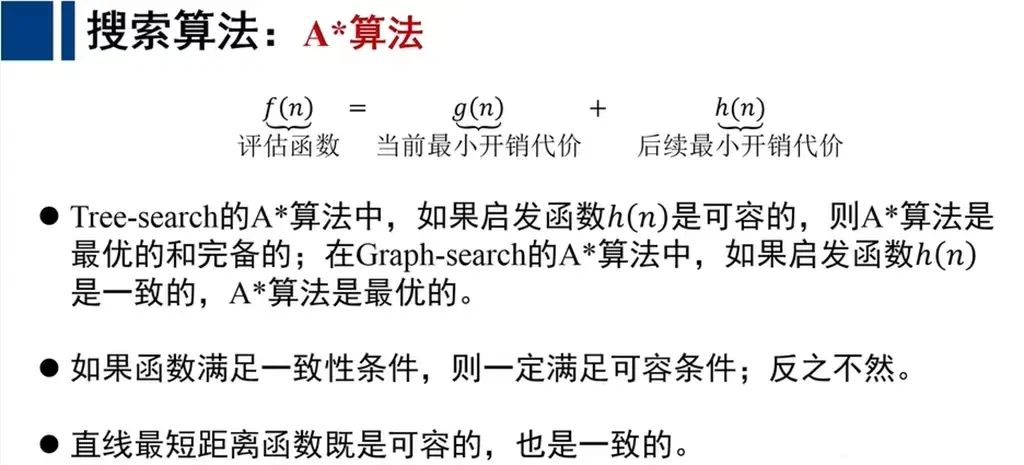
首先, 使用评价函数 f(x) 来对上述的节点选择顺序进行排序
下面先定义两个函数:
g(x) 为从根节点到x节点的代价总和
h(x) 为从x节点到目标节点的估计代价总和
这类应用算法有:
代价一致搜索 (Uniform Cost Search or Dijkstra search) f(x) = g(x)
贪心搜索 (Greedy Search) f(x) = h(x)
A星搜索 (A* Search) f(x) = g(x) + h(x)
性质
Admissible heuristic
admissibility是启发式搜索的一个性质,如果满足这个性质,那么,启发函数一定能得到最佳solution。
A*搜索能找到最优解的充分条件:
1.搜索树上存在着从起始点到目标点的最优路径
2.问题域是有限的
3.所有结点的子结点的成本>0
4.h(n) =< h*(n) (h*(n)为从节点n到目标点的实际成本)
123易满足,第4条中这样的启发函数被称为Admissible heuristic,也就是说在A*中我们对目标的估计必须小于或等于其实际值,不然可能会出现找不到最优路径或者根本找不到路径的情况
Consistent heuristic
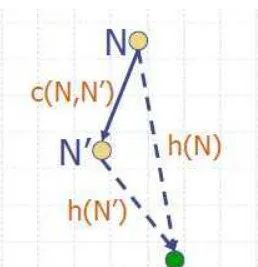
N是开始节点,绿色的是目标节点,h(N)则是从N到目标节点的启发函数,N’为任意不同于N的节点
A star with tree能找到最优解的充分条件:
1.搜索树上存在着从起始点到目标点的最优路径
2.问题域是有限的
3.所有结点的子结点的成本>0
4.h(N’) + c(N, N’) < h(N)
这样的启发函数被称为Consistent heuristic,只有满足了这个才能保证A*算法在图搜索中能找到最优解。
一个启发函数是consistent,它也是admissible。反之,不可。
dominate
Dominance(用于表现不同启发函数的关系)
two admissible heuristics ha, hb:
如果对于所有n, ha(n) >hb(n),那么,我们可以说 ha dominates hb,对于这个search问题,我们最好使用ha作为启发函数。
总结
A star算法的特点(考虑g(x)+h(x),注意树搜索满足Admissible heuristic,图搜索满足Consistent heuristic时)
1.完备性:肯定能找到最优解
2.最优性:找到的解花费最小
3.快:扩展更少的节点
UCS(代价一致搜索,只考虑g(x))
1.完备性:肯定能找到最优解
2.最优性:找到的解花费最小
3.比A*慢一些
广度优先搜索是代价一致搜索的特例
贪婪搜索(启发式搜索,但只考虑h(x))
1.不完备性:不保证能找到最优解
深度优先搜索是贪婪搜索的特例(令h(n)===0,A*搜索退化为宽度优先搜索(BFS),不估计成本,肯定能找到最优解)
本文仅做学术分享,如有侵权,请联系删文。
3D视觉工坊精品课程官网:3dcver.com
2.面向自动驾驶领域的3D点云目标检测全栈学习路线!(单模态+多模态/数据+代码)
3.彻底搞透视觉三维重建:原理剖析、代码讲解、及优化改进
4.国内首个面向工业级实战的点云处理课程
5.激光-视觉-IMU-GPS融合SLAM算法梳理和代码讲解
6.彻底搞懂视觉-惯性SLAM:基于VINS-Fusion正式开课啦
7.彻底搞懂基于LOAM框架的3D激光SLAM: 源码剖析到算法优化
8.彻底剖析室内、室外激光SLAM关键算法原理、代码和实战(cartographer+LOAM +LIO-SAM)
重磅!3DCVer-学术论文写作投稿 交流群已成立
扫码添加小助手微信,可申请加入3D视觉工坊-学术论文写作与投稿 微信交流群,旨在交流顶会、顶刊、SCI、EI等写作与投稿事宜。
同时也可申请加入我们的细分方向交流群,目前主要有3D视觉、CV&深度学习、SLAM、三维重建、点云后处理、自动驾驶、多传感器融合、CV入门、三维测量、VR/AR、3D人脸识别、医疗影像、缺陷检测、行人重识别、目标跟踪、视觉产品落地、视觉竞赛、车牌识别、硬件选型、学术交流、求职交流、ORB-SLAM系列源码交流、深度估计等微信群。
一定要备注:研究方向+学校/公司+昵称,例如:”3D视觉 + 上海交大 + 静静“。请按照格式备注,可快速被通过且邀请进群。原创投稿也请联系。

▲长按加微信群或投稿

▲长按关注公众号
3D视觉从入门到精通知识星球:针对3D视觉领域的视频课程(三维重建系列、三维点云系列、结构光系列、手眼标定、相机标定、激光/视觉SLAM、自动驾驶等)、知识点汇总、入门进阶学习路线、最新paper分享、疑问解答五个方面进行深耕,更有各类大厂的算法工程人员进行技术指导。与此同时,星球将联合知名企业发布3D视觉相关算法开发岗位以及项目对接信息,打造成集技术与就业为一体的铁杆粉丝聚集区,近4000星球成员为创造更好的AI世界共同进步,知识星球入口:
学习3D视觉核心技术,扫描查看介绍,3天内无条件退款

圈里有高质量教程资料、答疑解惑、助你高效解决问题
觉得有用,麻烦给个赞和在看~

