- 1什么是Spring?它有哪些好处?_csdn中spring是什么
- 2金融数据分析用哪些分析软件Python,R还是SQL?_金融学需要用到的工具和软件
- 3i.MX6ULL(十五) 根文件系统_imx6ull 根文件系统
- 4基于强化学习的可解释性推荐 文献三篇_强化学习经典文献
- 5Txt文本编码格式说明
- 6Android Studio 在XML编辑无代码提示_android studio写代码没有提示
- 7java OA 系统开发二:数据库设计之oa数据库设计_java oa多级审批 数据库设计
- 8Python|Pyppeteer获取去哪儿酒店数据(20)_python爬取酒店数据
- 9微服务学习 | Springboot整合Dubbo+Nacos实现RPC调用_springboot rpc调用注解
- 10Python Conda报错:Collecting package metadata (current_repodata.json): failed_conda create -n py14 python==3.8.5 collecting pack
RK3588部署YOLOv8_rk3588 yolov8
赞
踩
本人基于YOLOv8改进水了一篇论文,为了增加工作量在RK3588上部署了改进的算法。根据网上的方法一直没有部署成功,最后在参考官方和网络上的方法成功实现算法的部署,因此写下这篇博客进行记录,以防后面忘了怎么部署,也可供网友参考.
环境
电脑端:os:Ubuntu 20.04 rknn-toolkit2:1.5.2 python:3.8
开发板:orange pi 5 os:Ubuntu 22.04.3 LTS jammy python:3.10.12
1.导出torchscript模型
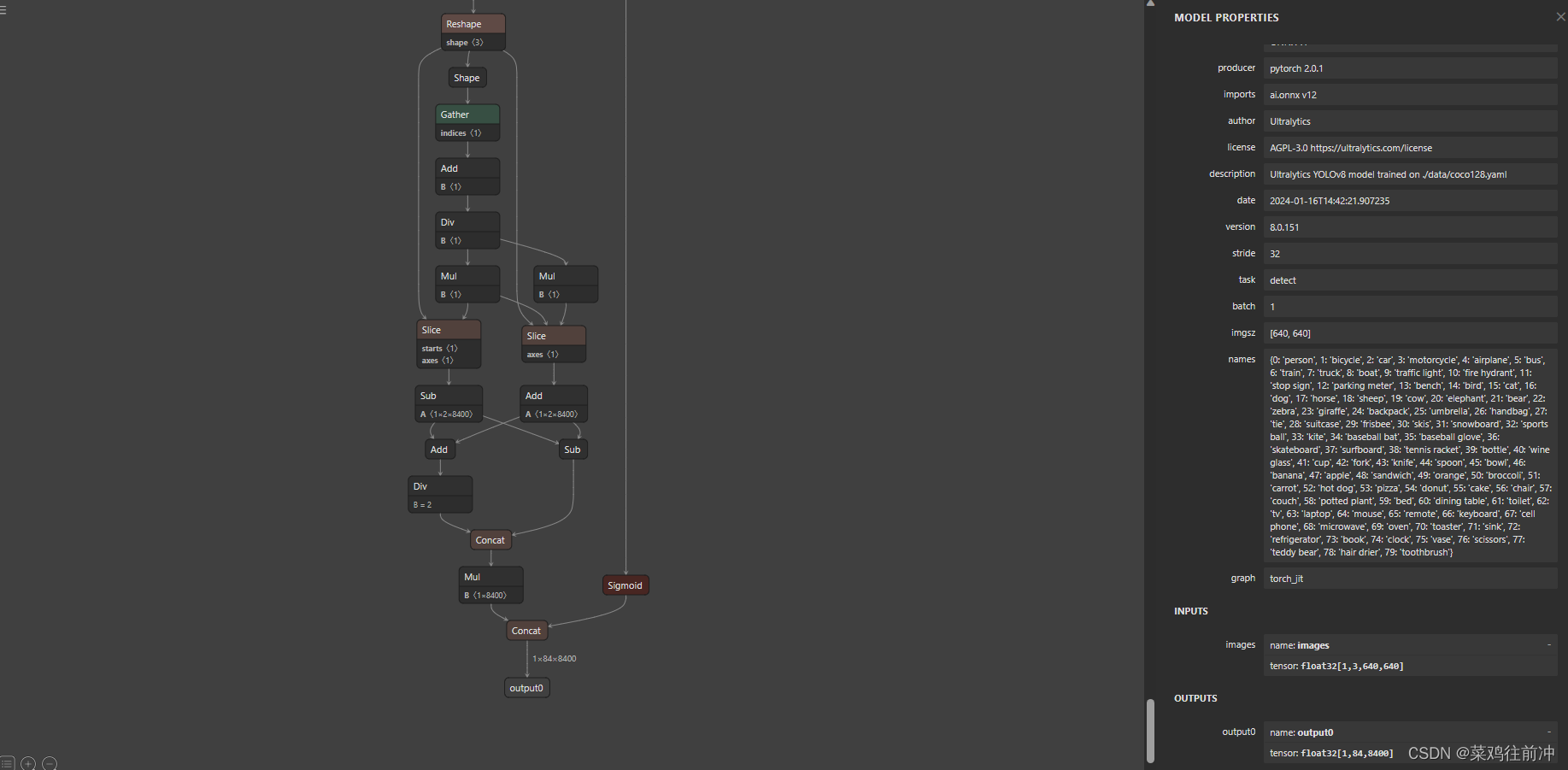
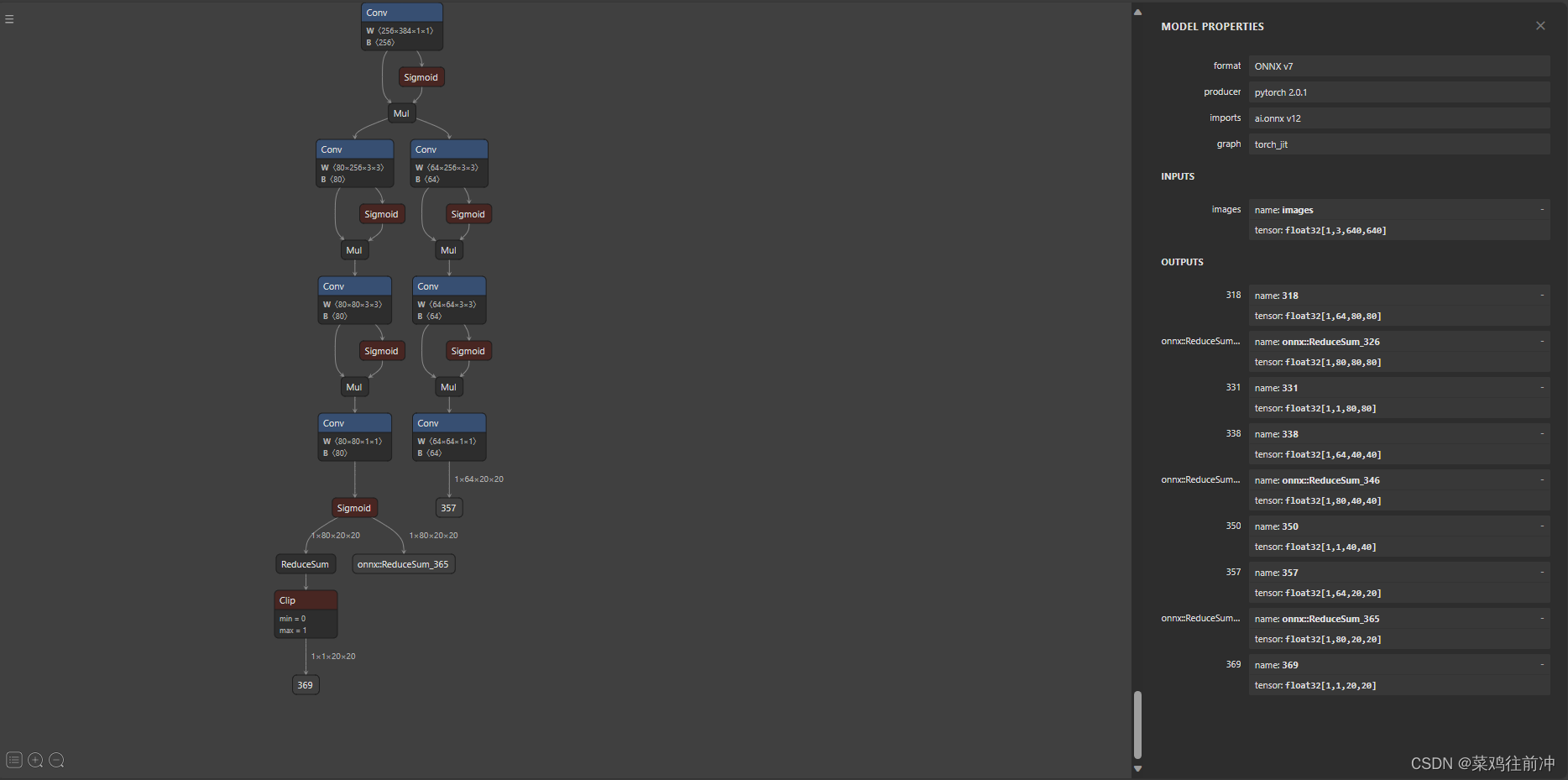
瑞芯微官方提供了直接转pytorch模型转torchscript的代码,不需要转成ONNX格式。我参考网上pytorch->onnx->rknn的方法,模型转出为rknn后,代码一直跑不起来,主要是我的模型导出为onnx后只有一个输出output0,官方给的onnx模型有9个输出头。我用pytorch->torchscript->rknn的方法,程序完美运行。
首先,克隆Rockchip官方的YOLOv8代码,仓库地址为https://github.com/airockchip/ultralytics_yolov8.git 也可以使用我的代码文件,我本地测试是没有问题的 链接:https://pan.baidu.com/s/1NJT3JggsDu11j-AjfWoRbg?pwd=e4ox
然后修改./ultralytics/nn/modules/head.py里的代码

将pytorch模型转torchscript,转完可以再pt模型文件夹下看到best_rknnopt.torchscript
- from ultralytics import YOLO
-
- model = YOLO('./runs/detect/train/yolov8_coco/weights/best.pt') # 将这里换成你模型所在的路径
- path = model.export(format="rknn", opset=12)
torchscript有6个输出

2.torchscript转rknn
克隆代码https://github.com/airockchip/rknn_model_zoo.git,这里要注意这个仓库现在更新到了1.5.2版本,但我使用的是1.5.0版本,克隆的时候需要注意,也可以使用我提供的链接直接下载压缩包https://pan.baidu.com/s/1LlZt9l3ks2Rg-cioTh8jbQ?pwd=ggi1 提取码:ggi1
打开 rknn_model_zoo/models/CV/object_detection/yolo/RKNN_model_convert 文件夹,新建一个yolov8_rk3588.yml文件,文件内容如下,根据你的模型路径修改model_file_path。
- #support yolo[v5,v6,v7,v8], ppyoloe_plus
- model_framework: pytorch
- model_file_path: yolov8_coco.torchscript
- RK_device_platform: RK3588
- # RK_device_id: simulator
- dataset: ../../../../../datasets/COCO/coco_subset_10.txt
- quantize: True
- pre_compile: online
-
- graph:
- in_0:
- shape: 1,3,640,640
- mean_values: 0
- std_values: 255
- img_type: RGB
-
- configs:
- quantized_dtype: asymmetric_quantized-8
- quantized_algorithm: normal
- optimization_level: 2
- # force_builtin_perm: True

修改convert_yolo.sh
python ../../../../../common/rknn_converter/rknn_convert.py --yml_path ./yolov8_rk3588.yml然后终端输入 ./convert_yolo.sh 运行脚本程序,在model_cvt/RK3588/路径下可以看到转换成功的rknn模型
3.测试rknn模型
我这里是使用ADB连接开发板进行连板测试的,如果只在电脑进行模拟测试,要修改代码,我在代码里注释了。也可以下载我的工程进行测试 https://github.com/yjl326/yolo_rknn.git
- import os
- import cv2
- from rknn.api import RKNN
- import numpy as np
-
-
- RKNN_MODEL = "./model/yolov8_coco_RK3588_i8.rknn"
- IMG_FOLDER = "./datasets/COCO/"
- RESULT_PATH = './result/coco'
-
- CLASSES = ['person','bicycle','car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush' ]
-
- OBJ_THRESH = 0.45
- NMS_THRESH = 0.45
-
- MODEL_SIZE = (640, 640)
-
- color_palette = np.random.uniform(0, 255, size=(len(CLASSES), 3))
-
- def sigmoid(x):
- return 1 / (1 + np.exp(-x))
-
- def letter_box(im, new_shape, pad_color=(0,0,0), info_need=False):
- # Resize and pad image while meeting stride-multiple constraints
- shape = im.shape[:2] # current shape [height, width]
- if isinstance(new_shape, int):
- new_shape = (new_shape, new_shape)
-
- # Scale ratio
- r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
-
- # Compute padding
- ratio = r # width, height ratios
- new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
- dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
-
- dw /= 2 # divide padding into 2 sides
- dh /= 2
-
- if shape[::-1] != new_unpad: # resize
- im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
- top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
- left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
- im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=pad_color) # add border
-
- if info_need is True:
- return im, ratio, (dw, dh)
- else:
- return im
-
- def filter_boxes(boxes, box_confidences, box_class_probs):
- """Filter boxes with object threshold.
- """
- box_confidences = box_confidences.reshape(-1)
- candidate, class_num = box_class_probs.shape
-
- class_max_score = np.max(box_class_probs, axis=-1)
- classes = np.argmax(box_class_probs, axis=-1)
-
- _class_pos = np.where(class_max_score* box_confidences >= OBJ_THRESH)
- scores = (class_max_score * box_confidences)[_class_pos]
-
- boxes = boxes[_class_pos]
- classes = classes[_class_pos]
-
- return boxes, classes, scores
-
- def nms_boxes(boxes, scores):
- """Suppress non-maximal boxes.
- # Returns
- keep: ndarray, index of effective boxes.
- """
- x = boxes[:, 0]
- y = boxes[:, 1]
- w = boxes[:, 2] - boxes[:, 0]
- h = boxes[:, 3] - boxes[:, 1]
-
- areas = w * h
- order = scores.argsort()[::-1]
-
- keep = []
- while order.size > 0:
- i = order[0]
- keep.append(i)
-
- xx1 = np.maximum(x[i], x[order[1:]])
- yy1 = np.maximum(y[i], y[order[1:]])
- xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])
- yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])
-
- w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)
- h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)
- inter = w1 * h1
-
- ovr = inter / (areas[i] + areas[order[1:]] - inter)
- inds = np.where(ovr <= NMS_THRESH)[0]
- order = order[inds + 1]
- keep = np.array(keep)
- return keep
-
- def softmax(x, axis=None):
- x = x - x.max(axis=axis, keepdims=True)
- y = np.exp(x)
- return y / y.sum(axis=axis, keepdims=True)
-
- def dfl(position):
- # Distribution Focal Loss (DFL)
- n,c,h,w = position.shape
- p_num = 4
- mc = c//p_num
- y = position.reshape(n,p_num,mc,h,w)
- y = softmax(y, 2)
- acc_metrix = np.array(range(mc),dtype=float).reshape(1,1,mc,1,1)
- y = (y*acc_metrix).sum(2)
- return y
-
-
- def box_process(position):
- grid_h, grid_w = position.shape[2:4]
- col, row = np.meshgrid(np.arange(0, grid_w), np.arange(0, grid_h))
- col = col.reshape(1, 1, grid_h, grid_w)
- row = row.reshape(1, 1, grid_h, grid_w)
- grid = np.concatenate((col, row), axis=1)
- stride = np.array([MODEL_SIZE[1]//grid_h, MODEL_SIZE[0]//grid_w]).reshape(1,2,1,1)
-
- position = dfl(position)
- box_xy = grid +0.5 -position[:,0:2,:,:]
- box_xy2 = grid +0.5 +position[:,2:4,:,:]
- xyxy = np.concatenate((box_xy*stride, box_xy2*stride), axis=1)
-
- return xyxy
-
- def post_process(input_data):
- boxes, scores, classes_conf = [], [], []
- defualt_branch=3
- pair_per_branch = len(input_data)//defualt_branch
- # Python 忽略 score_sum 输出
- for i in range(defualt_branch):
- boxes.append(box_process(input_data[pair_per_branch*i]))
- classes_conf.append(input_data[pair_per_branch*i+1])
- scores.append(np.ones_like(input_data[pair_per_branch*i+1][:,:1,:,:], dtype=np.float32))
-
- def sp_flatten(_in):
- ch = _in.shape[1]
- _in = _in.transpose(0,2,3,1)
- return _in.reshape(-1, ch)
-
- boxes = [sp_flatten(_v) for _v in boxes]
- classes_conf = [sp_flatten(_v) for _v in classes_conf]
- scores = [sp_flatten(_v) for _v in scores]
-
- boxes = np.concatenate(boxes)
- classes_conf = np.concatenate(classes_conf)
- scores = np.concatenate(scores)
-
- # filter according to threshold
- boxes, classes, scores = filter_boxes(boxes, scores, classes_conf)
-
- # nms
- nboxes, nclasses, nscores = [], [], []
- for c in set(classes):
- inds = np.where(classes == c)
- b = boxes[inds]
- c = classes[inds]
- s = scores[inds]
- keep = nms_boxes(b, s)
-
- if len(keep) != 0:
- nboxes.append(b[keep])
- nclasses.append(c[keep])
- nscores.append(s[keep])
-
- if not nclasses and not nscores:
- return None, None, None
-
- boxes = np.concatenate(nboxes)
- classes = np.concatenate(nclasses)
- scores = np.concatenate(nscores)
-
- return boxes, classes, scores
-
- def draw_detections(img, left, top, right, bottom, score, class_id):
- """
- Draws bounding boxes and labels on the input image based on the detected objects.
- Args:
- img: The input image to draw detections on.
- box: Detected bounding box.
- score: Corresponding detection score.
- class_id: Class ID for the detected object.
- Returns:
- None
- """
-
- # Retrieve the color for the class ID
- color = color_palette[class_id]
-
- # Draw the bounding box on the image
- cv2.rectangle(img, (int(left), int(top)), (int(right), int(bottom)), color, 2)
-
- # Create the label text with class name and score
- label = f"{CLASSES[class_id]}: {score:.2f}"
-
- # Calculate the dimensions of the label text
- (label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
-
- # Calculate the position of the label text
- label_x = left
- label_y = top - 10 if top - 10 > label_height else top + 10
-
- # Draw a filled rectangle as the background for the label text
- cv2.rectangle(img, (label_x, label_y - label_height), (label_x + label_width, label_y + label_height), color,
- cv2.FILLED)
-
- # Draw the label text on the image
- cv2.putText(img, label, (label_x, label_y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)
-
-
- def draw(image, boxes, scores, classes):
- img_h, img_w = image.shape[:2]
- # Calculate scaling factors for bounding box coordinates
- x_factor = img_w / MODEL_SIZE[0]
- y_factor = img_h / MODEL_SIZE[1]
-
- for box, score, cl in zip(boxes, scores, classes):
-
- x1, y1, x2, y2 = [int(_b) for _b in box]
-
- left = int(x1* x_factor)
- top = int(y1 * y_factor) - 10
- right = int(x2 * x_factor)
- bottom = int(y2 * y_factor) + 10
-
- print('class: {}, score: {}'.format(CLASSES[cl], score))
- print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(left, top, right, bottom))
-
- # Retrieve the color for the class ID
-
- draw_detections(image, left, top, right, bottom, score, cl)
-
- # cv2.rectangle(image, (left, top), (right, bottom), color, 2)
- # cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
- # (left, top - 6),
- # cv2.FONT_HERSHEY_SIMPLEX,
- # 0.6, (0, 0, 255), 2)
-
-
- if __name__ == '__main__':
-
- # 创建RKNN对象
- rknn = RKNN()
-
- #加载RKNN模型
- print('--> Load RKNN model')
- ret = rknn.load_rknn(RKNN_MODEL)
- if ret != 0:
- print('Load RKNN model failed')
- exit(ret)
- print('done')
-
- # 初始化 runtime 环境
- print('--> Init runtime environment')
- # run on RK356x/RK3588 with Debian OS, do not need specify target.
- ret = rknn.init_runtime(target='rk3588', device_id='48c122b87375ccbc')
- # 如果使用电脑进行模拟测试
- # ret = rknn.init_runtime()
-
- if ret != 0:
- print('Init runtime environment failed!')
- exit(ret)
- print('done')
-
- # 数据处理
- img_list = os.listdir(IMG_FOLDER)
- for i in range(len(img_list)):
- img_name = img_list[i]
- img_path = os.path.join(IMG_FOLDER, img_name)
- if not os.path.exists(img_path):
- print("{} is not found", img_name)
- continue
- img_src = cv2.imread(img_path)
- if img_src is None:
- print("文件不存在\n")
-
- # Due to rga init with (0,0,0), we using pad_color (0,0,0) instead of (114, 114, 114)
- pad_color = (0,0,0)
- img = letter_box(im= img_src.copy(), new_shape=(MODEL_SIZE[1], MODEL_SIZE[0]), pad_color=(0,0,0))
- #img = cv2.resize(img_src, (640, 512), interpolation=cv2.INTER_LINEAR) # direct resize
- input = np.expand_dims(img, axis=0)
-
- outputs = rknn.inference([input])
-
- boxes, classes, scores = post_process(outputs)
-
- img_p = img_src.copy()
-
- if boxes is not None:
-
- draw(img_p, boxes, scores, classes)
-
- # 保存结果
- if not os.path.exists(RESULT_PATH):
- os.mkdir(RESULT_PATH)
-
- result_path = os.path.join(RESULT_PATH, img_name)
- cv2.imwrite(result_path, img_p)
- print('Detection result save to {}'.format(result_path))
-
- pass
-
- rknn.release()
RK3588端运行代码,其实就是把RKNN换成RKNNLite,其他都一样
- import os
- import cv2
- from rknnlite.api import RKNNLite
- import numpy as np
-
- RKNN_MODEL = "./model/yolov8_coco_RK3588_i8.rknn"
- IMG_FOLDER = "./datasets/COCO/"
- RESULT_PATH = './result/coco'
-
- CLASSES = ['person','bicycle','car', 'motorcycle', 'airplane', 'bus', 'train', 'truck', 'boat', 'traffic light',
- 'fire hydrant', 'stop sign', 'parking meter', 'bench', 'bird', 'cat', 'dog', 'horse', 'sheep', 'cow',
- 'elephant', 'bear', 'zebra', 'giraffe', 'backpack', 'umbrella', 'handbag', 'tie', 'suitcase', 'frisbee',
- 'skis', 'snowboard', 'sports ball', 'kite', 'baseball bat', 'baseball glove', 'skateboard', 'surfboard',
- 'tennis racket', 'bottle', 'wine glass', 'cup', 'fork', 'knife', 'spoon', 'bowl', 'banana', 'apple',
- 'sandwich', 'orange', 'broccoli', 'carrot', 'hot dog', 'pizza', 'donut', 'cake', 'chair', 'couch',
- 'potted plant', 'bed', 'dining table', 'toilet', 'tv', 'laptop', 'mouse', 'remote', 'keyboard', 'cell phone',
- 'microwave', 'oven', 'toaster', 'sink', 'refrigerator', 'book', 'clock', 'vase', 'scissors', 'teddy bear',
- 'hair drier', 'toothbrush' ]
-
-
-
- OBJ_THRESH = 0.45
- NMS_THRESH = 0.45
-
- MODEL_SIZE = (640, 640)
-
- color_palette = np.random.uniform(0, 255, size=(len(CLASSES), 3))
-
- def sigmoid(x):
- return 1 / (1 + np.exp(-x))
-
- def letter_box(im, new_shape, pad_color=(0,0,0), info_need=False):
- # Resize and pad image while meeting stride-multiple constraints
- shape = im.shape[:2] # current shape [height, width]
- if isinstance(new_shape, int):
- new_shape = (new_shape, new_shape)
-
- # Scale ratio
- r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
-
- # Compute padding
- ratio = r # width, height ratios
- new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
- dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
-
- dw /= 2 # divide padding into 2 sides
- dh /= 2
-
- if shape[::-1] != new_unpad: # resize
- im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
- top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
- left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
- im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=pad_color) # add border
-
- if info_need is True:
- return im, ratio, (dw, dh)
- else:
- return im
-
- def filter_boxes(boxes, box_confidences, box_class_probs):
- """Filter boxes with object threshold.
- """
- box_confidences = box_confidences.reshape(-1)
- candidate, class_num = box_class_probs.shape
-
- class_max_score = np.max(box_class_probs, axis=-1)
- classes = np.argmax(box_class_probs, axis=-1)
-
- _class_pos = np.where(class_max_score* box_confidences >= OBJ_THRESH)
- scores = (class_max_score * box_confidences)[_class_pos]
-
- boxes = boxes[_class_pos]
- classes = classes[_class_pos]
-
- return boxes, classes, scores
-
- def nms_boxes(boxes, scores):
- """Suppress non-maximal boxes.
- # Returns
- keep: ndarray, index of effective boxes.
- """
- x = boxes[:, 0]
- y = boxes[:, 1]
- w = boxes[:, 2] - boxes[:, 0]
- h = boxes[:, 3] - boxes[:, 1]
-
- areas = w * h
- order = scores.argsort()[::-1]
-
- keep = []
- while order.size > 0:
- i = order[0]
- keep.append(i)
-
- xx1 = np.maximum(x[i], x[order[1:]])
- yy1 = np.maximum(y[i], y[order[1:]])
- xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])
- yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])
-
- w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)
- h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)
- inter = w1 * h1
-
- ovr = inter / (areas[i] + areas[order[1:]] - inter)
- inds = np.where(ovr <= NMS_THRESH)[0]
- order = order[inds + 1]
- keep = np.array(keep)
- return keep
-
- def softmax(x, axis=None):
- x = x - x.max(axis=axis, keepdims=True)
- y = np.exp(x)
- return y / y.sum(axis=axis, keepdims=True)
-
- def dfl(position):
- # Distribution Focal Loss (DFL)
- n,c,h,w = position.shape
- p_num = 4
- mc = c//p_num
- y = position.reshape(n,p_num,mc,h,w)
- y = softmax(y, 2)
- acc_metrix = np.array(range(mc),dtype=float).reshape(1,1,mc,1,1)
- y = (y*acc_metrix).sum(2)
- return y
-
-
- def box_process(position):
- grid_h, grid_w = position.shape[2:4]
- col, row = np.meshgrid(np.arange(0, grid_w), np.arange(0, grid_h))
- col = col.reshape(1, 1, grid_h, grid_w)
- row = row.reshape(1, 1, grid_h, grid_w)
- grid = np.concatenate((col, row), axis=1)
- stride = np.array([MODEL_SIZE[1]//grid_h, MODEL_SIZE[0]//grid_w]).reshape(1,2,1,1)
-
- position = dfl(position)
- box_xy = grid +0.5 -position[:,0:2,:,:]
- box_xy2 = grid +0.5 +position[:,2:4,:,:]
- xyxy = np.concatenate((box_xy*stride, box_xy2*stride), axis=1)
-
- return xyxy
-
- def post_process(input_data):
- boxes, scores, classes_conf = [], [], []
- defualt_branch=3
- pair_per_branch = len(input_data)//defualt_branch
- # Python 忽略 score_sum 输出
- for i in range(defualt_branch):
- boxes.append(box_process(input_data[pair_per_branch*i]))
- classes_conf.append(input_data[pair_per_branch*i+1])
- scores.append(np.ones_like(input_data[pair_per_branch*i+1][:,:1,:,:], dtype=np.float32))
-
- def sp_flatten(_in):
- ch = _in.shape[1]
- _in = _in.transpose(0,2,3,1)
- return _in.reshape(-1, ch)
-
- boxes = [sp_flatten(_v) for _v in boxes]
- classes_conf = [sp_flatten(_v) for _v in classes_conf]
- scores = [sp_flatten(_v) for _v in scores]
-
- boxes = np.concatenate(boxes)
- classes_conf = np.concatenate(classes_conf)
- scores = np.concatenate(scores)
-
- # filter according to threshold
- boxes, classes, scores = filter_boxes(boxes, scores, classes_conf)
-
- # nms
- nboxes, nclasses, nscores = [], [], []
- for c in set(classes):
- inds = np.where(classes == c)
- b = boxes[inds]
- c = classes[inds]
- s = scores[inds]
- keep = nms_boxes(b, s)
-
- if len(keep) != 0:
- nboxes.append(b[keep])
- nclasses.append(c[keep])
- nscores.append(s[keep])
-
- if not nclasses and not nscores:
- return None, None, None
-
- boxes = np.concatenate(nboxes)
- classes = np.concatenate(nclasses)
- scores = np.concatenate(nscores)
-
- return boxes, classes, scores
-
- def draw_detections(img, left, top, right, bottom, score, class_id):
- """
- Draws bounding boxes and labels on the input image based on the detected objects.
- Args:
- img: The input image to draw detections on.
- box: Detected bounding box.
- score: Corresponding detection score.
- class_id: Class ID for the detected object.
- Returns:
- None
- """
-
- # Retrieve the color for the class ID
- color = color_palette[class_id]
-
- # Draw the bounding box on the image
- cv2.rectangle(img, (int(left), int(top)), (int(right), int(bottom)), color, 2)
-
- # Create the label text with class name and score
- label = f"{CLASSES[class_id]}: {score:.2f}"
-
- # Calculate the dimensions of the label text
- (label_width, label_height), _ = cv2.getTextSize(label, cv2.FONT_HERSHEY_SIMPLEX, 0.5, 1)
-
- # Calculate the position of the label text
- label_x = left
- label_y = top - 10 if top - 10 > label_height else top + 10
-
- # Draw a filled rectangle as the background for the label text
- cv2.rectangle(img, (label_x, label_y - label_height), (label_x + label_width, label_y + label_height), color,
- cv2.FILLED)
-
- # Draw the label text on the image
- cv2.putText(img, label, (label_x, label_y), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 0), 1, cv2.LINE_AA)
-
-
- def draw(image, boxes, scores, classes):
- img_h, img_w = image.shape[:2]
- # Calculate scaling factors for bounding box coordinates
- x_factor = img_w / MODEL_SIZE[0]
- y_factor = img_h / MODEL_SIZE[1]
-
- for box, score, cl in zip(boxes, scores, classes):
-
- x1, y1, x2, y2 = [int(_b) for _b in box]
-
- left = int(x1* x_factor)
- top = int(y1 * y_factor)
- right = int(x2 * x_factor)
- bottom = int(y2 * y_factor)
-
- print('class: {}, score: {}'.format(CLASSES[cl], score))
- print('box coordinate left,top,right,down: [{}, {}, {}, {}]'.format(left, top, right, bottom))
-
- # Retrieve the color for the class ID
-
- draw_detections(image, left, top, right, bottom, score, cl)
-
- # cv2.rectangle(image, (left, top), (right, bottom), color, 2)
- # cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
- # (left, top - 6),
- # cv2.FONT_HERSHEY_SIMPLEX,
- # 0.6, (0, 0, 255), 2)
-
-
- if __name__ == '__main__':
-
- # 创建RKNN对象
- rknn_lite = RKNNLite()
-
- #加载RKNN模型
- print('--> Load RKNN model')
- ret = rknn_lite.load_rknn(RKNN_MODEL)
- if ret != 0:
- print('Load RKNN model failed')
- exit(ret)
- print('done')
-
- # 初始化 runtime 环境
- print('--> Init runtime environment')
- # run on RK356x/RK3588 with Debian OS, do not need specify target.
- ret = rknn_lite.init_runtime()
- if ret != 0:
- print('Init runtime environment failed!')
- exit(ret)
- print('done')
-
- # 数据处理
- img_list = os.listdir(IMG_FOLDER)
- for i in range(len(img_list)):
- img_name = img_list[i]
- img_path = os.path.join(IMG_FOLDER, img_name)
- if not os.path.exists(img_path):
- print("{} is not found", img_name)
- continue
- img_src = cv2.imread(img_path)
- if img_src is None:
- print("文件不存在\n")
-
- # Due to rga init with (0,0,0), we using pad_color (0,0,0) instead of (114, 114, 114)
- pad_color = (0,0,0)
- img = letter_box(im= img_src.copy(), new_shape=(MODEL_SIZE[1], MODEL_SIZE[0]), pad_color=(0,0,0))
- #img = cv2.resize(img_src, (640, 512), interpolation=cv2.INTER_LINEAR) # direct resize
- input = np.expand_dims(img, axis=0)
-
- outputs = rknn_lite.inference([input])
-
- boxes, classes, scores = post_process(outputs)
-
- img_p = img_src.copy()
-
- if boxes is not None:
-
- draw(img_p, boxes, scores, classes)
-
- # 保存结果
- if not os.path.exists(RESULT_PATH):
- os.mkdir(RESULT_PATH)
-
- result_path = os.path.join(RESULT_PATH, img_name)
- cv2.imwrite(result_path, img_p)
- print('Detection result save to {}'.format(result_path))
-
- pass
-
- # cv2.imshow("full post process result", img_p)
-
- rknn_lite.release()
-
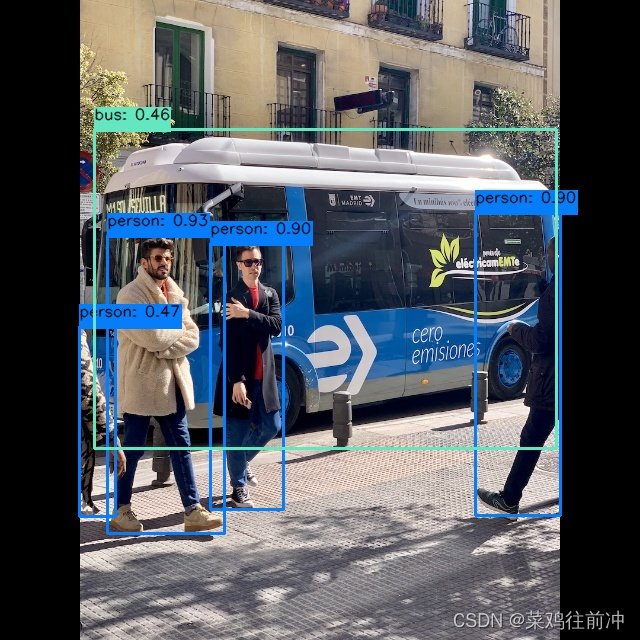
4.检测效果