
- 1ubuntu查看 固态硬盘位置_在Ubuntu(Linux)中启用固态硬盘(固态硬盘)TRIM | MOS86...
- 2刚拿到的《HarmonyOS应用开发者高级认证》,全网整理的题目,将近300题,100%通过_鸿蒙 关于video组件的回调事件,下列说法错误的是
- 3传感器概述_传感器 csdn
- 4Unity开发1 Unity简介
- 5Docker相关的概念
- 6MYSQL my.ini 详细配置_my.ini怎么配置
- 7亚马逊云VPC涉及到的知识点有哪些?
- 8chatgpt赋能python:Python遍历指南:掌握5种常用方法实现高效遍历_python遍历循环
- 9指定区间的链表反转问题|力扣leetcode92反转链表2(cpp、Java实现)_链表内指定区间翻转 递归
- 10PyCharm:简化工作与生活,提升生产力的理想工具_pycharm优势
数字图像处理 第5章 图像复原与重建_图像增强中的degradation
赞
踩
5 图像复原与重建
5.1 退化及噪声模型
5.1.1 图像退化 (Image Degradation)
得到的图像产生失真,未能反应真实内容。
模糊:是一个确定的过程 \quad 图像信息有丢失
噪声:是一个随机的过程
5.1.2 图像复原 (Image Restoration)
也称图像恢复,图像处理中的一大类技术
| 相同 | 不同 | |
|---|---|---|
| 图像增强 | 改进输入图像的视觉质量 | 图像增强借助人的视觉系统特性, 以取得较好的视觉结果(不考虑退化原因) |
| 图像恢复 | 改进输入图像的视觉质量 | 图像增强借助人的视觉系统特性, 以取得较好的视觉结果(不考虑退化原因) |

g ( x , y ) = f ( x , y ) ∗ h ( x , y ) + n ( x , y ) G ( u , v ) = F ( u , v ) H ( u , v ) + N ( u , v ) g(x,y)=f(x,y)*h(x,y)+n(x,y) \\ \quad \\ G(u,v)=F(u,v)H(u,v)+N(u,v) g(x,y)=f(x,y)∗h(x,y)+n(x,y)G(u,v)=F(u,v)H(u,v)+N(u,v)
5.1.3 噪声模型
信噪比:
S
N
R
=
10
l
o
g
(
V
s
2
V
n
2
)
SNR=10log(\frac{V_s^2}{V_n^2})
SNR=10log(Vn2Vs2)
| 噪声类型 | 概率密度函数 | 图 |
|---|---|---|
| 高斯噪声 | p ( z ) = 1 2 π σ e x p [ − ( z − μ ) 2 2 σ 2 ] p(z)=\frac{1}{\sqrt{2\pi}\sigma}exp[-\frac{(z-\mu)^2}{2\sigma^2}] p(z)=2π σ1exp[−2σ2(z−μ)2] | 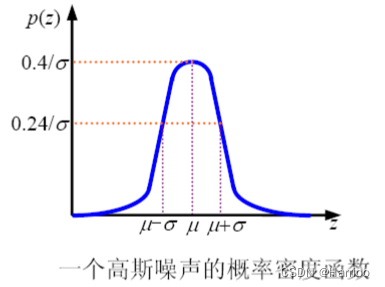 |
| 均匀噪声 |
p
(
z
)
=
{
1
/
(
b
−
a
)
a
≤
z
≤
b
0
e
l
s
e
p(z)= μ = ( a + b ) / 2 σ 2 = ( b − a ) 2 / 12 \mu=(a+b)/2 \\ \sigma^2=(b-a)^2/12 μ=(a+b)/2σ2=(b−a)2/12 | 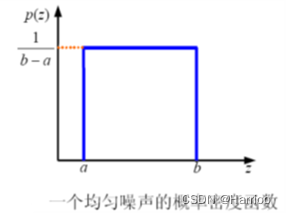 |
| 脉冲(椒盐)噪声 |
p
(
z
)
=
{
P
a
i
f
z
=
a
P
b
i
f
z
=
b
0
e
l
s
e
p(z)= |  |
| Rayleigh噪声 |
p
(
z
)
=
{
2
b
(
z
−
a
)
e
−
(
z
−
a
)
2
/
b
i
f
z
≥
a
0
i
f
z
<
a
p(z)= | 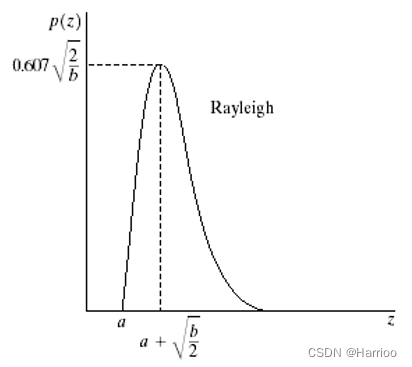 |
| Erlang(Gamma)噪声 |
p
(
z
)
=
{
a
b
z
b
−
1
(
b
−
1
)
!
e
a
z
i
f
z
≥
0
0
i
f
z
<
0
p(z)= | 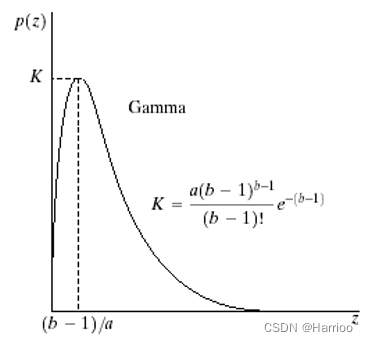 |
| Exponential噪声 |
p
(
z
)
=
{
a
e
−
a
z
i
f
z
≥
0
0
i
f
z
<
0
p(z)= | 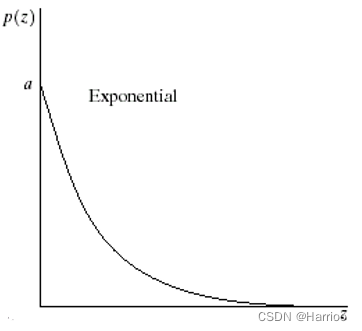 |
5.2 去噪算法——空间滤波
5.2.1 去高斯噪声
| 算法 | 公式 | 备注 |
|---|---|---|
| 算数均值 | f ^ ( x , y ) = 1 M N ∑ ( s , t ) ∈ S x y g ( s , t ) \hat{f}(x,y)=\frac{1}{MN}\sum _{(s,t)\in S_{xy}}g(s,t) f^(x,y)=MN1(s,t)∈Sxy∑g(s,t) | |
| 几何均值 | f ^ ( x , y ) = [ ∏ ( s , t ) ∈ S x y g ( s , t ) ] 1 M N \hat{f}(x,y)=\left[ \prod _{(s,t)\in S_{xy}}g(s,t)\right]^{\frac{1}{MN}} f^(x,y)= (s,t)∈Sxy∏g(s,t) MN1 | 会更尖锐一些 |
| 自适应均值滤波 |
f
^
(
x
,
y
)
=
g
(
x
,
y
)
−
σ
η
2
σ
L
2
[
g
(
x
,
y
)
−
m
L
]
=
σ
η
2
σ
L
2
m
L
+
(
1
−
σ
η
2
σ
L
2
)
g
(
x
,
y
)
| 效果最好 |

\quad
5.2.2 去脉冲噪声
-
顺序统计滤波器
滤波器 公式 中值滤波 f ^ ( x , y ) = m e d i a n ( s , t ) ∈ S x y { g ( s , t ) } \hat{f}(x,y)=\mathop{median}\limits_{(s,t)\in S_{xy}}\{g(s,t)\} f^(x,y)=(s,t)∈Sxymedian{g(s,t)} 最大最小滤波 f ^ ( x , y ) = m a x ( s , t ) ∈ S x y { g ( s , t ) } f ^ ( x , y ) = m i n ( s , t ) ∈ S x y { g ( s , t ) } \hat{f}(x,y)=\mathop{max}\limits_{(s,t)\in S_{xy}}\{g(s,t)\} \\ \hat{f}(x,y)=\mathop{min}\limits_{(s,t)\in S_{xy}}\{g(s,t)\} f^(x,y)=(s,t)∈Sxymax{g(s,t)}f^(x,y)=(s,t)∈Sxymin{g(s,t)} 中点滤波 f ^ ( x , y ) = 1 2 [ m e d i a n ( s , t ) ∈ S x y { g ( s , t ) } + m i n ( s , t ) ∈ S x y { g ( s , t ) } ] \hat{f}(x,y)=\frac{1}{2}\left[\mathop{median}\limits_{(s,t)\in S_{xy}}\{g(s,t)\}+\mathop{min}\limits_{(s,t)\in S_{xy}}\{g(s,t)\}\right] f^(x,y)=21[(s,t)∈Sxymedian{g(s,t)}+(s,t)∈Sxymin{g(s,t)}] Alpha-trimmed
均值滤波f ^ ( x , y ) = 1 M N − D ∑ ( s , t ) ∈ S ( x y ) g r ( s , t ) \hat{f}(x,y)=\frac{1}{MN-D}\sum_{(s,t)\in S_(xy)}g_r(s,t) f^(x,y)=MN−D1(s,t)∈S(xy)∑gr(s,t) -
自适应中值滤波 ★ \bigstar ★
z m i n = S x y z_{min}=S_{xy} zmin=Sxy 最小灰度值
z m a x = S x y z_{max}=S_{xy} zmax=Sxy 最大灰度值
z m e d = S x y z_{med}=S_{xy} zmed=Sxy 灰度的中值
z x y = ( x , y ) z_{xy}=(x,y) zxy=(x,y) 处灰度值
S m a x = S_{max}= Smax= 所允许 S x y S_{xy} Sxy的最大尺寸
\quad
Level A: 若 z m i n < z m e d < z m a x z_{min}<z_{med}<z_{max} zmin<zmed<zmax,则 → \rightarrow → Level B;否则增加窗口尺寸
\qquad\space\quad 若窗口尺寸 ≤ S m a x \leq S_{max} ≤Smax,重复Level A;否则输出 z x y z_{xy} zxy
Level B: 若 z m i n < z x y < z m a x z_{min}<z_{xy}<z_{max} zmin<zxy<zmax,输出 z x y z_{xy} zxy,否则输出 z m e d z_{med} zmed

5.2.3 去周期性噪声
-
构建陷波滤波器,将能量较高的部分进行抑制

-
使用带阻滤波器

\quad
5.3 图像恢复
5.3.1 无约束恢复
5.3.1.1 逆滤波模型
F ( u , v ) → H ( u , v ) G ( u , v ) → M ( u , v ) F ′ ( u , v ) F(u,v) \xrightarrow{\boxed{H(u,v)}} G(u,v) \xrightarrow{\boxed{M(u,v)}} F'(u,v) F(u,v)H(u,v) G(u,v)M(u,v) F′(u,v)
令 M ( u , v ) = 1 H ( u , v ) M(u,v)=\frac{1}{H(u,v)} M(u,v)=H(u,v)1,是 H ( u , v ) H(u,v) H(u,v)之逆
代表恢复滤波器的转移函数
5.3.1.2 逆滤波实际应用时的缺点
-
无噪声的情况
若在频谱平面对图象信号有决定影响的点或区域上, H ( u , v ) H(u,v) H(u,v)的值为0,那么 G ( u , v ) G(u,v) G(u,v)的值也为0,故不能确定这些频率处的 F ( u , v ) F(u,v) F(u,v)值,也就难以恢复原始图象 f ( x , y ) f(x,y) f(x,y)。 -
有噪声的情况
F ^ ( u , v ) = G ( u , v ) M ( u , v ) = F ( u , v ) + N ( u , v ) H ( u , v ) \hat{F}(u,v)=G(u,v)M(u,v)=F(u,v)+\frac{N(u,v)}{H(u,v)} F^(u,v)=G(u,v)M(u,v)=F(u,v)+H(u,v)N(u,v)- H ( u , v ) = 0 H(u,v)=0 H(u,v)=0, F ^ ( u , v ) \hat{F}(u,v) F^(u,v)没有定义
- H ( u , v ) = 0 H(u,v)=0 H(u,v)=0附近, H ( u , v ) H(u,v) H(u,v)较小, N ( u , v ) / H ( u , v ) N(u,v)/H(u,v) N(u,v)/H(u,v)会非常大,结果 F ^ ( u , v ) \hat{F}(u,v) F^(u,v)与 F ( u , v ) F(u,v) F(u,v)大不相同, f ^ ( u , v ) \hat{f}(u,v) f^(u,v)与 f ( u , v ) f(u,v) f(u,v)就不再相像
5.3.1.3 逆滤波的改进
-
改进一
M ( u , v ) = { 1 / H ( u , v ) i f u 2 + v 2 ≤ ω 0 1 i f u 2 + v 2 > ω 0 M(u,v)=M(u,v)={1/H(u,v)1if u2+v2≤ω0if u2+v2>ω0{1/H(u,v)1if u2+v2≤ω0if u2+v2>ω0 -
改进二
M ( u , v ) = { k i f H ( u , v ) ≤ d 1 / H ( u , v ) e l s e M(u,v)=M(u,v)={k1/H(u,v)if H(u,v)≤delse{k1/H(u,v)if H(u,v)≤delse
5.3.1.4 逆滤波的效果
可以用逆滤波来消除匀速直线运动模糊


5.3.2 有约束恢复
5.3.2.1 维纳滤波(最小均方误差滤波)
思想:将图像和噪声视为随机变量,目标是求未污染图像
f
f
f的一个估计
f
^
\hat{f}
f^,使它们之间的均方误差最小
m
i
n
e
2
=
m
i
n
E
{
(
f
−
f
^
)
2
}
\mathop{min}e^2=\mathop{min}E\left\{ \left(f-\hat{f}\right)^2\right\}
mine2=minE{(f−f^)2}
F
^
(
u
,
v
)
=
[
1
H
(
u
,
v
)
×
∣
H
(
u
,
v
)
∣
2
∣
H
(
u
,
v
)
∣
2
+
s
[
S
n
(
u
,
v
)
/
S
f
(
u
,
v
)
]
]
G
(
u
,
v
)
\hat{F}(u,v)=\left[\frac{1}{H(u,v)}\times\frac{\left|H(u,v)\right|^2}{\left|H(u,v)\right|^2+s\left[S_n(u,v)/S_f(u,v)\right]}\right]G(u,v)
F^(u,v)=[H(u,v)1×∣H(u,v)∣2+s[Sn(u,v)/Sf(u,v)]∣H(u,v)∣2]G(u,v)
方括号中的式子通常称为最小均方误差滤波器或最小二乘方误差滤波器
S n ( u , v ) = ∣ N ( u , v ) ∣ 2 S_n(u,v)=|N(u,v)|^2 Sn(u,v)=∣N(u,v)∣2为噪声功率谱
S f ( u , v ) = ∣ F ( u , v ) ∣ 2 S_f(u,v)=|F(u,v)|^2 Sf(u,v)=∣F(u,v)∣2为未退化图像的功率谱
s s s是变量
当 s = 1 s=1 s=1时,为维纳滤波
无噪声时,是理想的逆滤波器
可使用下式来近似
F ^ ( u , v ) = [ 1 H ( u , v ) × ∣ H ( u , v ) ∣ 2 ∣ H ( u , v ) ∣ 2 + K ] G ( u , v ) \hat{F}(u,v)=\left[\frac{1}{H(u,v)}\times\frac{\left|H(u,v)\right|^2}{\left|H(u,v)\right|^2+K}\right]G(u,v) F^(u,v)=[H(u,v)1×∣H(u,v)∣2+K∣H(u,v)∣2]G(u,v)
5.3.2.2 维纳滤波的效果


