
热门标签
当前位置: article > 正文
ROS 2 Humble-实践_小鱼一键安装ros2
作者:花生_TL007 | 2024-06-17 16:52:36
赞
踩
小鱼一键安装ros2
ROS 2 Humble 一键安装
推荐一波:赵老师的课
小鱼的网站:小鱼
ubuntu22.04-jammy
VMware16.0
密钥:
ZF3R0-FHED2-M80TY-8QYGC-NPKYF YF390-0HF8P-M81RQ-2DXQE-M2UT6
安装好系统后
1. 使用小鱼的一键安装指令
wget http://fishros.com/install -O fishros && . fishros
- 1
安装编译工具
sudo apt install python3-colcon-common-extensions
- 1
vscode安装
sudo apt install terminator
- 1
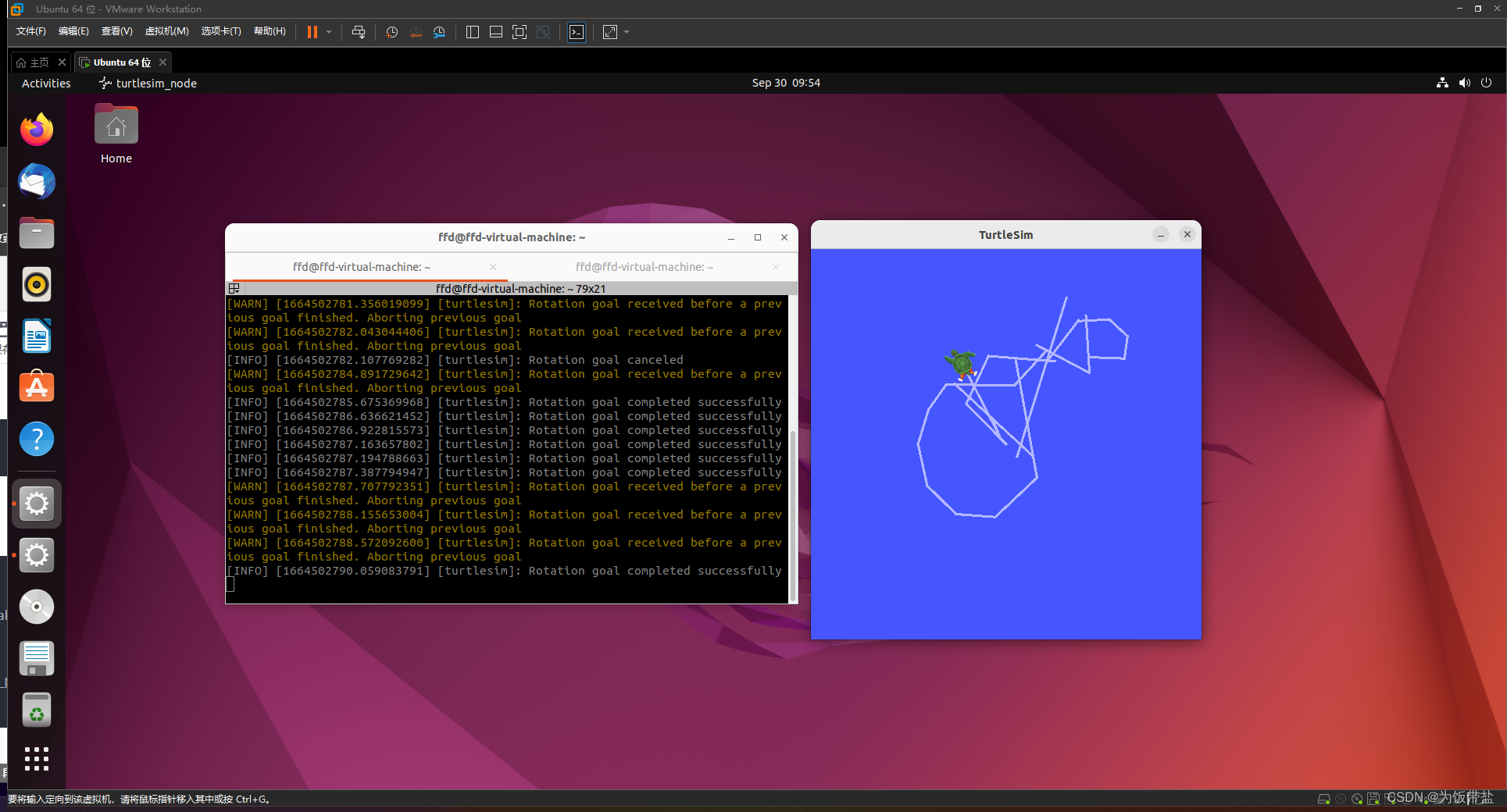
2. 测试ROS2
ros2 run turtlesim turtlesim_node
ros2 run turtlesim turtle_teleop_key
- 1
- 2
3.创建工作空间&&创建功能包
#创建工作空间
mkdir -p catkin_ws/src
#创建C++ 功能包
ros2 pkg create cpp_pkg --build-type ament_cmake --dependencies rclcpp std_msgs --node-name node_name
#创建python功能包
ros2 pkg create python_pkg --build-type ament_python --dependencies rclpy std_msgs --node-name node_name
#编译
colcon build
# 编译指定功能包
colcon build --packages-select pkg
#source 工作空间
source install/setup.bash
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
4. 代码模板
python模板
import rclpy
from rclpy.node import Node
class MyNode(Node):
def __init__(self):
super().__init__("node_name_py")
self.get_logger().info("hello world!")
def main():
rclpy.init()
node = MyNode()
rclpy.shutdown()
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
CPP模板
#include "rclcpp/rclcpp.hpp" class MyNode: public rclcpp::Node{ public: MyNode():Node("node_name"){ RCLCPP_INFO(this->get_logger(),"hello world!"); } }; int main(int argc, char *argv[]) { rclcpp::init(argc,argv); auto node = std::make_shared<MyNode>(); rclcpp::shutdown(); return 0; }

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/花生_TL007/article/detail/732022
推荐阅读
相关标签

