
热门标签
热门文章
- 12713. 矩阵中严格递增的单元格数
- 2malloc/free 的开销,如何去掉这种开销?_malloc时间开销
- 3linux IRQ Management(二)- ARM异常模式_arm共有多少种异常模式
- 4SpringCloud+Eureka+Nacos使用和扩展_微服务同时注册eurcka和nacos
- 5Python模块
- 6搜狗输入法不能输入中文,shift切换为中文输出的还是英文--------解决方法
- 7Linux下载mysql(Centos7)_mysql linux 下载
- 8推荐一款免费的AI绘图软件,可生成二次元画作和3D模型_ai绘图免费软件
- 9fatal: Not a git repository_fatal: not a git repository:
- 10【渝粤题库】广东开放大学 经济学基础 形成性考核_机会成本时是作出一项决策时所付出的费用或损失。
当前位置: article > 正文
蒙特卡洛法的七自由度机械臂工作空间分析_解析法结合作图法确定末端执行器的实际工作空间
作者:笔触狂放9 | 2024-08-17 15:08:22
赞
踩
解析法结合作图法确定末端执行器的实际工作空间
MATLAB R2014a
1.蒙特卡洛法:
i.确定机械臂各关节变量的变化范围(θ_min,θ_max)
ii.确定末端执行器的位姿矩阵T=
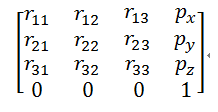
位置向量为[px,py,pz)]’。
iii.利用随机函数rand生成N个 0-1的随机点,以(θ_max-θ_min)∙rand为随机步长,得各关节变量的随机值,θ_i=θ_(i,min)+(θ_(i,max)-θ_(i,min))∙rand
iv. 把以上生成的所有关节变量的随机值,代入到位置向量,
v.收集这些坐标点,并绘制。
2.利用robotics toolbox 10.2(版本不同,结果可能不 同),首先
startup_rvc %启动工具箱
L(1)= Link('revolute', 'd', 0, 'a', 0, 'alpha', pi/2);
L(2)= Link('revolute', 'd', 147, 'a', 0, 'alpha', pi/2);
L(3)= Link('revolute', 'd', 600, 'a', 0, 'alpha', pi/2);
L(4)= Link('revolute', 'd', 147, 'a', 0, 'alpha'- 1
- 2
- 3
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/993245
推荐阅读
相关标签

