
热门标签
热门文章
- 1数据库技术-数据库概念设计
- 2Java访问剪切板API控制台输出莫名异常_exception "java.lang.classnotfoundexception: com/i
- 3将一个字符串中的字符按照ASCII码从小到大的顺序排序_将字符串s中的所有字符按ascii值从小到大排序
- 4ELK搭建logcenter,监控laravel和nginx日志_laravel elk
- 5鸿蒙教程(一): 鸿蒙组件开发环境配置_openharmony sdk下载
- 6gradle-generator自动生成代码的两种方式_gradle 集成 generator
- 7SAP ADM100-Unit3 系统配置介绍:系统如何评估它的参数
- 8springboot-springSecurity 之 http Basic认证 (四)_websecurityconfig 详解httpbasic()
- 9iOS 关于xcodebuild打包整理_xcode build后的内容
- 10git 如何撤回已push的代码?_git撤回push操作
当前位置: article > 正文
Matlab DDPG
作者:笔触狂放9 | 2024-03-24 15:50:51
赞
踩
Matlab DDPG
文章目录
1 rlSimulinkEnv
1.1 说明
rlSimulinkEnv函数从Simulink®模型中创建强化学习环境对象。环境对象起接口作用,当调用sim或train时,这些函数反过来调用Simulink模型,为智能体生成经验。
- env = rlSimulinkEnv(mdl, agentBlocks)为Simulink模型mdl创建强化学习环境对象env,agentBlocks包含到mdl中一个或多个强化学习agent块的路径。如果使用这种语法,每个agent块必须引用MATLAB®工作空间中已经存在的agent对象。
- env = rlSimulinkEnv(mdl, agentBlocks, obsInfo, actInfo)为模型mdl创建强化学习环境对象env。两个单元数组obsInfo和actInfo必须包含mdl中每个agent块的观测和动作规范,与它们出现在agentBlocks中的阶数相同。
- env = rlSimulinkEnv( _ _ , ‘UseFastRestart’, fastRestartToggle)创建了一个强化学习环境对象env,并支持快速重启。在前面语法中的任何一个输入参数之后使用这个语法。
1.2 例子
1.2.1 使用工作空间Agent创建Simulink环境
在MATLAB®工作空间中加载agent。
load rlWaterTankDDPGAgent
- 1
为rlwatertank模型创建环境,其中包含一个RL Agent模块。由于区块所使用的agent已经在工作空间中,因此不需要通过观测和动作规范来创建环境。
env = rlSimulinkEnv('rlwatertank','rlwatertank/RL Agent')
- 1
env =
SimulinkEnvWithAgent with properties:
Model : rlwatertank
AgentBlock : rlwatertank/RL Agent
ResetFcn : []
UseFastRestart : on
- 1
- 2
- 3
- 4
- 5
- 6
- 7
通过进行两个样本时间的短暂模拟来验证环境。
validateEnvironment(env)
- 1
现在可以分别使用train和sim对环境中的Agent进行训练和仿真。
1.2.2 为Simulink模型创建强化学习环境
打开模型:
mdl = 'rlSimplePendulumModel';
open_system(mdl)
- 1
- 2
分别创建rlNumericSpec和rlFiniteSetSpec对象用于观察和动作信息。
obsInfo = rlNumericSpec([3 1]) % vector of 3 observations: sin(theta), cos(theta), d(theta)/dt
- 1
obsInfo =
rlNumericSpec with properties:
LowerLimit: -Inf
UpperLimit: Inf
Name: [0x0 string]
Description: [0x0 string]
Dimension: [3 1]
DataType: "double"
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
actInfo = rlFiniteSetSpec([-2 0 2]) % 3 possible values for torque: -2 Nm, 0 Nm and 2 Nm
- 1
actInfo =
rlFiniteSetSpec with properties:
Elements: [3x1 double]
Name: [0x0 string]
Description: [0x0 string]
Dimension: [1 1]
DataType: "double"
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
对于rlNumericSpec和rlFiniteSetSpec对象,可以使用点数表示法赋值属性值。
obsInfo.Name = 'observations';
actInfo.Name = 'torque';
- 1
- 2
分配智能体分块路径信息,利用前面步骤提取的信息为Simulink模型创建强化学习环境。
agentBlk = [mdl '/RL Agent'];
env = rlSimulinkEnv(mdl,agentBlk,obsInfo,actInfo)
- 1
- 2
env =
SimulinkEnvWithAgent with properties:
Model : rlSimplePendulumModel
AgentBlock : rlSimplePendulumModel/RL Agent
ResetFcn : []
UseFastRestart : on
- 1
- 2
- 3
- 4
- 5
- 6
- 7
还可以包括使用点符号的reset功能。对于该实例,在模型工作空间中随机初始化theta0。
env.ResetFcn = @(in) setVariable(in,'theta0',randn,'Workspace',mdl)
- 1
env =
SimulinkEnvWithAgent with properties:
Model : rlSimplePendulumModel
AgentBlock : rlSimplePendulumModel/RL Agent
ResetFcn : @(in)setVariable(in,'theta0',randn,'Workspace',mdl)
UseFastRestart : on
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
1.2.3 创建Simulink多Agents环境
在MATLAB工作空间中加载智能体。
load rlCollaborativeTaskAgents
- 1
为rlCollaborativeTask模型创建一个环境,该环境有两个Agent块。由于两个区块( agentA和agentB)所使用的智能体已经在工作空间中,因此不需要通过它们的观察和动作规范来创建环境。
env = rlSimulinkEnv('rlCollaborativeTask',["rlCollaborativeTask/Agent A","rlCollaborativeTask/Agent B"])
- 1
env =
SimulinkEnvWithAgent with properties:
Model : rlCollaborativeTask
AgentBlock : [
rlCollaborativeTask/Agent A
rlCollaborativeTask/Agent B
]
ResetFcn : []
UseFastRestart : on
- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
2 创建Simulink环境和训练Agent
该实例的原始模型为水箱模型:
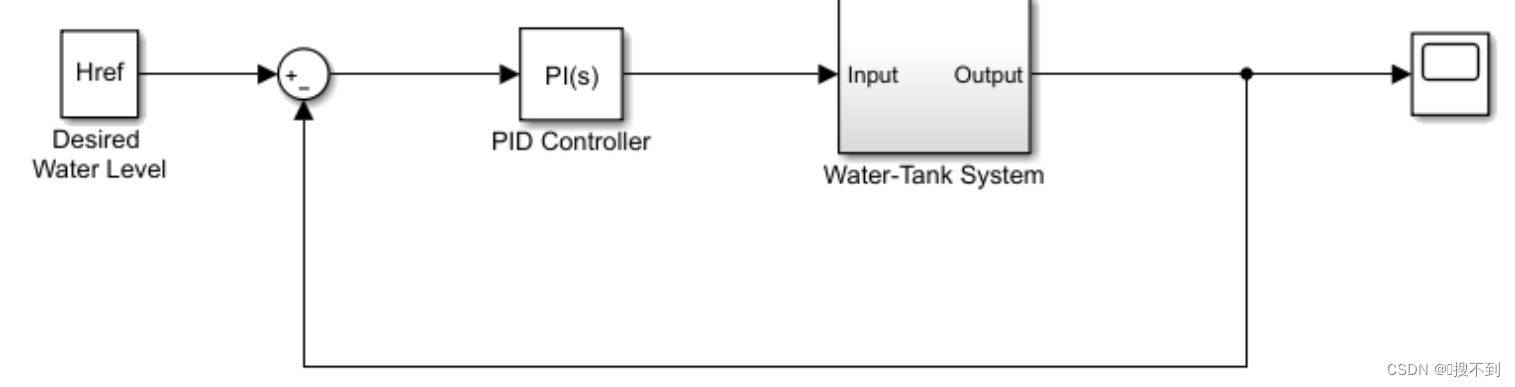
对原模型进行以下修改:
- 删除PID控制器,改由强化学习控制器;
- 插入RL Agent模块
- 串联观测向量 [ ∫ e d t , e , h ] T [\int edt, e, h]^T [∫edt,e,h]T,其中h是水箱高度, e = r − h e=r-h e=r−h,r是参考高度;
- 设置奖励 r e w a r d = 10 ( ∣ e ∣ < 0.1 ) − 1 ( ∣ e ∣ ≥ 0.1 ) − 100 ( h ≤ 0 ∣ ∣ h ≥ 20 ) reward=10(|e|<0.1)-1(|e|\ge0.1)-100(h\le0||h\ge20) reward=10(∣e∣<0.1)−1(∣e∣≥0.1)−100(h
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/303378
推荐阅读
相关标签

