
热门标签
热门文章
- 1关于学习时,如何处理专业术语的见解_无论学什么专业技术,都有很多专业术语不理解
- 2通过HttpURLConnection进行网络请求_httpurlconnection 打印请求头
- 3Scanner()
- 4云服务器Redis集群部署及客户端通过公网IP连接问题_如何为集群配置公网ip,用以加入redis白名单
- 5基于Python爬虫云南大理美食商家数据可视化系统设计与实现(Django框架) 研究背景与意义、国内外研究现状
- 6OpenGL和OpenCV_opengl openmvg
- 7小程序的点击事件bindtap和catchtap区别_小程序点击事件
- 8HTTP网络基础---TCP/IP---计算机网络学习(一)_http协议 tcp/ip协议栈 吴老师这个是网络安全基础吧
- 9Resnet 50 代码复现_resnet50代码复现
- 10多台电脑组建并行计算_主编推荐 | Gurobi 并行计算的设置和操作(附代码)
当前位置: article > 正文
Linux小项目-倒车影像功能设计_linux车机 项目
作者:笔触狂放9 | 2024-03-18 13:19:08
赞
踩
linux车机 项目
1. 前言
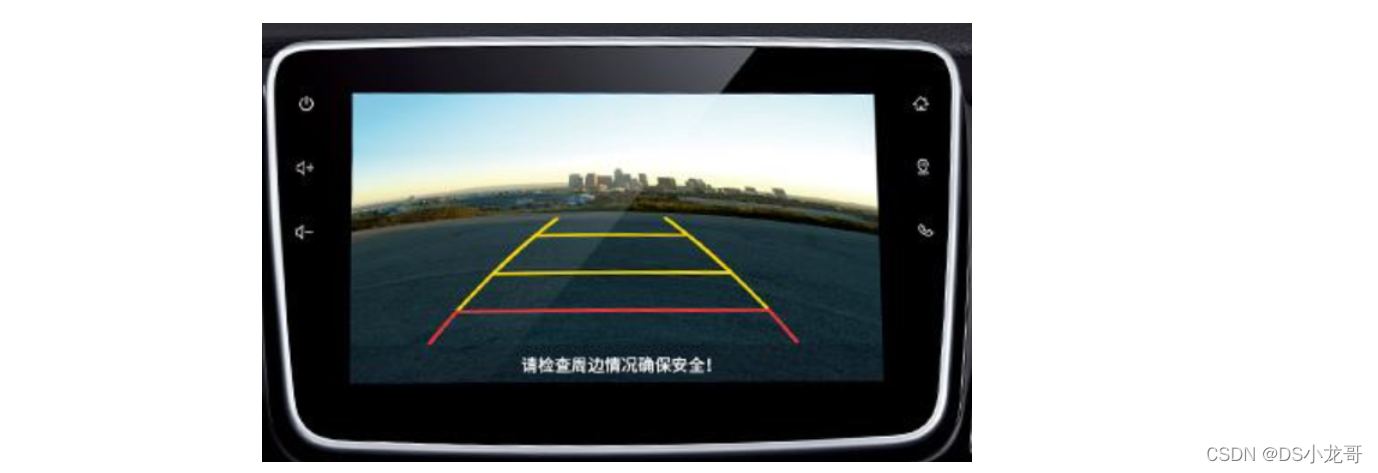
倒车影像已经是现在汽车的标配功能了,基本很多车出厂都是360全景影像,倒车影像又称泊车辅助系统,这篇文章就采用Linux开发板完成一个倒车影像的功能。
要完成倒车影像整个项目,需要准备一个LCD屏,一个摄像头,一个超声波测距模块,一个蜂鸣器;摄像头采集车尾的实时画面,在LCD屏上完成显示,超声波测距模块用于测量车尾距离障碍物的距离,根据设置的距离跳转PWM操作蜂鸣器实现报警提示。
当前Linux开发板采用友善之臂的Tiny4412开发板,CPU是三星的EXYNOS4412,板子上带有8G的EMMC,2G的DRR,运行的Linux版本是3.5,根文件系统采用busybox制作,这个系统是精简的最小系统。
摄像头采用USB免驱是摄像头,所有不需要编写驱动,LCD屏是友善之臂自己的7寸电容触摸屏,驱动是官方内核自带的,也不需要编写;剩下的超声波模块,蜂鸣器,需要自己填写驱动。
2. 案例代码
下面就将倒车影像项目的整个项目核心代码依次展示出来。
2.1 声波测距模块
采用的超声波模块在淘宝上很容易买到,
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/笔触狂放9/article/detail/263316
推荐阅读
相关标签

