
热门标签
热门文章
- 1Python之分配办公室_python编写程序,6名教师,随机分配到三个办公室,输出办公室教师姓名和人数
- 2github找不到连接_github上为什么找不到stmf407项目
- 3华为OD刷题C卷 - 每日刷题 29(机器人仓库搬砖,爱吃蟠桃的孙悟空)
- 4加减异或运算器_加减异或运算器c++
- 5Unicode编码解码在线转换工具_在线ucs2转换工具
- 6Spring Boot集成Redis实现keyspace监听 | Spring Cloud 34_springboot redis 监听
- 7copilot 授权奇怪问题_sign in failed. reason: request signininitiate fai
- 8GEE代码实例教程详解:NDVI时间序列趋势分析_gee提取某个特定范围内的ndvi时间序列曲线的代码
- 9微软蓝屏事件:网络安全风险与应对策略的深度解析_微软蓝屏 网络安全
- 10Ztree没有显示树形结构_modal里面放入nz-tree不显示
当前位置: article > 正文
ROS2机器人编程简述humble-第三章-BUMP AND GO BEHAVIOR IN PYTHON .4_ros2机器狗趴下代码
作者:秋刀鱼在做梦 | 2024-07-31 10:46:23
赞
踩
ros2机器狗趴下代码
前一篇,书中介绍了C++实现方式。在这一节,主要使用Python。
ROS2机器人编程简述humble-第三章-BUMP AND GO IN C++ .3
除了C++,Python是ROS2通过rcppy客户端库正式支持的语言之一。本节将再现在上一节中所做的,但使用Python。通过比较验证两种语言发展过程中的差异和相似性。此外,在前面的章节中解释了ROS2的原理,将认识到Python代码中ROS2的元素,因为原理是相同的。
cpp:
python:
main-cpp:
- #include <memory>
-
- #include "br2_fsm_bumpgo_cpp/BumpGoNode.hpp"
- #include "rclcpp/rclcpp.hpp"
-
- int main(int argc, char * argv[])
- {
- rclcpp::init(argc, argv);
-
- auto bumpgo_node = std::make_shared<br2_fsm_bumpgo_cpp::BumpGoNode>();
- rclcpp::spin(bumpgo_node);
-
- rclcpp::shutdown();
-
- return 0;
- }
main-python:
- from geometry_msgs.msg import Twist
-
- import rclpy
- from rclpy.duration import Duration
- from rclpy.node import Node
- from rclpy.qos import qos_profile_sensor_data
- from rclpy.time import Time
-
- from sensor_msgs.msg import LaserScan
-
-
- class BumpGoNode(Node):
-
- def __init__(self):
- super().__init__('bump_go')
-
- self.FORWARD = 0
- self.BACK = 1
- self.TURN = 2
- self.STOP = 3
- self.state = self.FORWARD
- self.state_ts = self.get_clock().now()
-
- self.TURNING_TIME = 2.0
- self.BACKING_TIME = 2.0
- self.SCAN_TIMEOUT = 1.0
-
- self.SPEED_LINEAR = 0.3
- self.SPEED_ANGULAR = 0.3
- self.OBSTACLE_DISTANCE = 1.0
-
- self.last_scan = None
-
- self.scan_sub = self.create_subscription(
- LaserScan,
- 'input_scan',
- self.scan_callback,
- qos_profile_sensor_data)
-
- self.vel_pub = self.create_publisher(Twist, 'output_vel', 10)
- self.timer = self.create_timer(0.05, self.control_cycle)
-
- def scan_callback(self, msg):
- self.last_scan = msg
-
- def control_cycle(self):
- if self.last_scan is None:
- return
-
- out_vel = Twist()
-
- if self.state == self.FORWARD:
- out_vel.linear.x = self.SPEED_LINEAR
-
- if self.check_forward_2_stop():
- self.go_state(self.STOP)
- if self.check_forward_2_back():
- self.go_state(self.BACK)
-
- elif self.state == self.BACK:
- out_vel.linear.x = -self.SPEED_LINEAR
-
- if self.check_back_2_turn():
- self.go_state(self.TURN)
-
- elif self.state == self.TURN:
- out_vel.angular.z = self.SPEED_ANGULAR
-
- if self.check_turn_2_forward():
- self.go_state(self.FORWARD)
-
- elif self.state == self.STOP:
- if self.check_stop_2_forward():
- self.go_state(self.FORWARD)
-
- self.vel_pub.publish(out_vel)
-
- def go_state(self, new_state):
- self.state = new_state
- self.state_ts = self.get_clock().now()
-
- def check_forward_2_back(self):
- pos = round(len(self.last_scan.ranges) / 2)
- return self.last_scan.ranges[pos] < self.OBSTACLE_DISTANCE
-
- def check_forward_2_stop(self):
- elapsed = self.get_clock().now() - Time.from_msg(self.last_scan.header.stamp)
- return elapsed > Duration(seconds=self.SCAN_TIMEOUT)
-
- def check_stop_2_forward(self):
- elapsed = self.get_clock().now() - Time.from_msg(self.last_scan.header.stamp)
- return elapsed < Duration(seconds=self.SCAN_TIMEOUT)
-
- def check_back_2_turn(self):
- elapsed = self.get_clock().now() - self.state_ts
- return elapsed > Duration(seconds=self.BACKING_TIME)
-
- def check_turn_2_forward(self):
- elapsed = self.get_clock().now() - self.state_ts
- return elapsed > Duration(seconds=self.TURNING_TIME)
-
-
- def main(args=None):
- rclpy.init(args=args)
-
- bump_go_node = BumpGoNode()
-
- rclpy.spin(bump_go_node)
-
- bump_go_node.destroy_node()
- rclpy.shutdown()
-
-
- if __name__ == '__main__':
- main()
可以看到Python,基本一个全包了……
之前C++,分别为头文件,功能实现和主程序等。
launch:
- from launch import LaunchDescription
- from launch_ros.actions import Node
-
-
- def generate_launch_description():
-
- kobuki_cmd = Node(package='br2_fsm_bumpgo_py',
- executable='bump_go_main',
- output='screen',
- parameters=[{
- 'use_sim_time': True
- }],
- remappings=[
- ('input_scan', '/scan_raw'),
- ('output_vel', '/nav_vel')
- ])
-
- ld = LaunchDescription()
- ld.add_action(kobuki_cmd)
-
- return ld
没有了CMakelist但需要setup:
- from glob import glob
- import os
-
- from setuptools import setup
-
- package_name = 'br2_fsm_bumpgo_py'
-
- setup(
- name=package_name,
- version='0.0.0',
- packages=[package_name],
- data_files=[
- ('share/ament_index/resource_index/packages',
- ['resource/' + package_name]),
- ('share/' + package_name, ['package.xml']),
- (os.path.join('share', package_name, 'launch'), glob('launch/*.launch.py'))
- ],
- install_requires=['setuptools'],
- zip_safe=True,
- maintainer='fmrico',
- maintainer_email='fmrico@gmail.com',
- description='TODO: Package description',
- license='TODO: License declaration',
- tests_require=['pytest'],
- entry_points={
- 'console_scripts': [
- 'bump_go_main = br2_fsm_bumpgo_py.bump_go_main:main'
- ],
- },
- )
具体内容参考书中介绍。
剩下的几乎一致了。
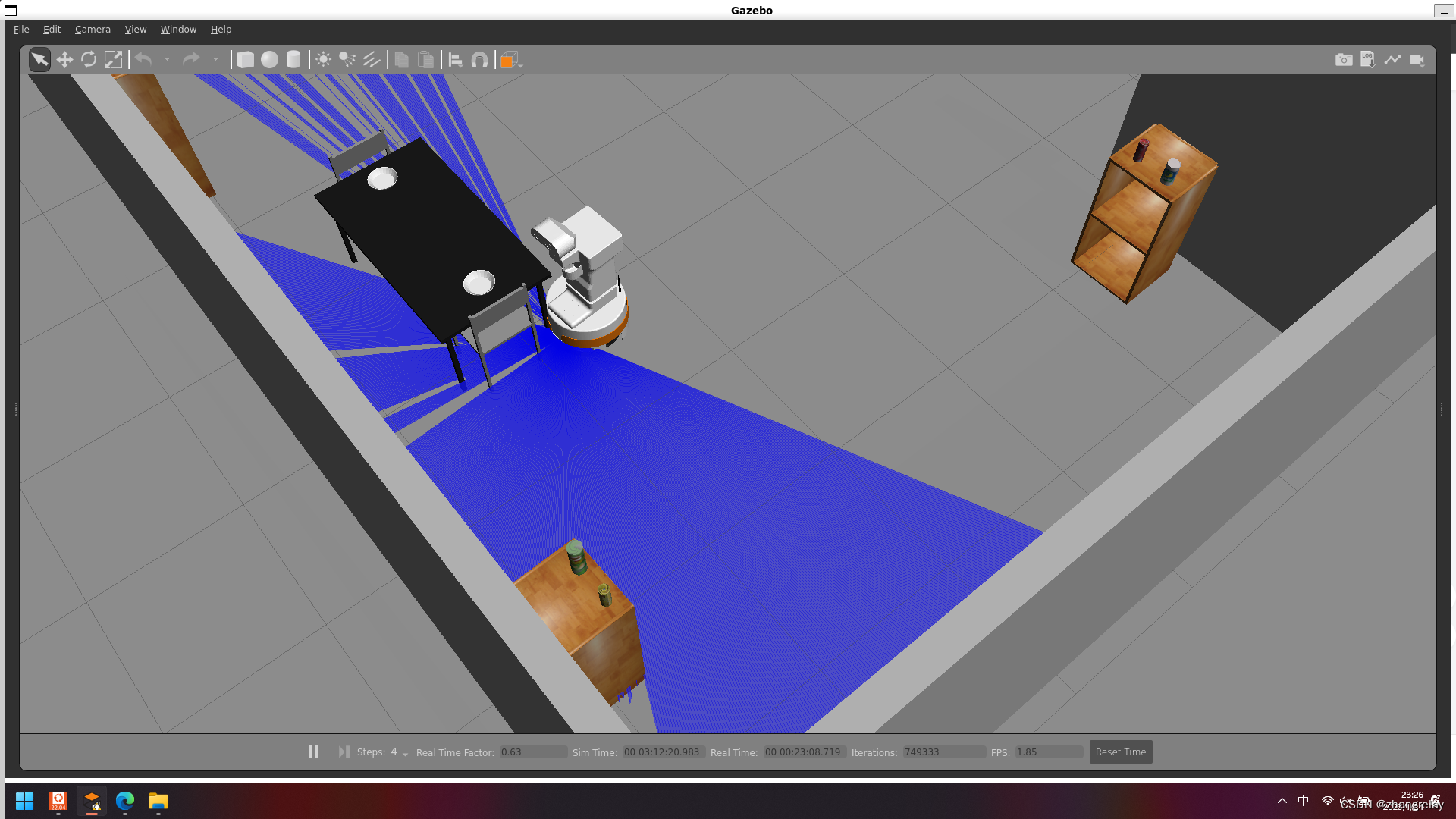
为了运行程序,首先通过在终端中键入以下命令启动模拟程序:
$ ros2 launch br2 tiago sim.launch.py
打开另一个终端,然后运行程序:
$ ros2 run br2 fsm bumpgo py bump go main --ros-args -r output vel:=/nav vel -r
input scan:=/scan raw -p use sim time:=true
还可以使用类似于C++版本的启动器,只需键入:
$ ros2 launch br2 fsm bumpgo py bump and go.launch.py
建议的练习:
1.修改Bump and Go项目,使机器人感知到前方左右对角线上的障碍物。它不是总是转向同一侧,而是转向没有障碍物的一侧。
2.修改“凹凸”(避障)项目,使机器人准确地转向无障碍物或更远的障碍物的角度。尝试两种方法:
•开环:转弯前计算转弯时间和速度。
•闭环:旋转,直到检测到前方的没有障碍物(开阔区域)。
推荐阅读
相关标签

