
热门标签
热门文章
- 1【 香橙派 AIpro评测】烧系统运行部署LLMS大模型跑开源yolov5物体检测并体验Jupyter Lab AI 应用样例(新手入门)
- 2linux的重要知识点_linux中的重要知识点
- 3深度学习:05 卷积神经网络介绍(CNN)_tride 池化
- 4sequoiadb java使用_Java开发基础_Java驱动_开发_JSON实例_文档中心_SequoiaDB巨杉数据库...
- 5AI时代,人工智能是开发者的助手还是替代者?
- 6大模型之SORA技术学习_sora模型csdn
- 7风险评估:IIS的安全配置,IIS安全基线检查加固
- 8pytorch之torch基础学习_torch 学习
- 9heic图片转换_heic-convert
- 10SpringCloud实战【九】: SpringCloud服务间调用_springcloud服务与服务之间的调用
当前位置: article > 正文
【STM32】飞控设计_aux3飞控
作者:秋刀鱼在做梦 | 2024-07-24 03:04:13
赞
踩
aux3飞控
【一些入门知识】
1.飞行原理
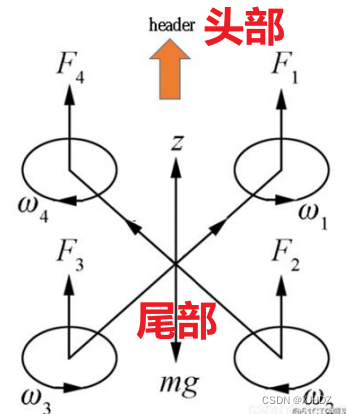
【垂直运动】
当 mg>F1+F2+F3+F4,此时做下降加速飞行当 mg<F1+F2+F3+F4,此时做升高加速飞行当 mg=F1+F2+F3+F4 ,此时垂直上保持匀速飞行。
【偏航飞行】
ω 4 + ω 2 ≠ ω 1+ ω 3 就会产生水平旋转
【俯仰飞行】
当 F1+F4<F2+F3 向前飞行当 F1+F4>F2+F3 向后飞行
【横滚飞行】
当 F4+F3>F1+F2 向右飞行当 F4+F3<F1+F2 向左飞行
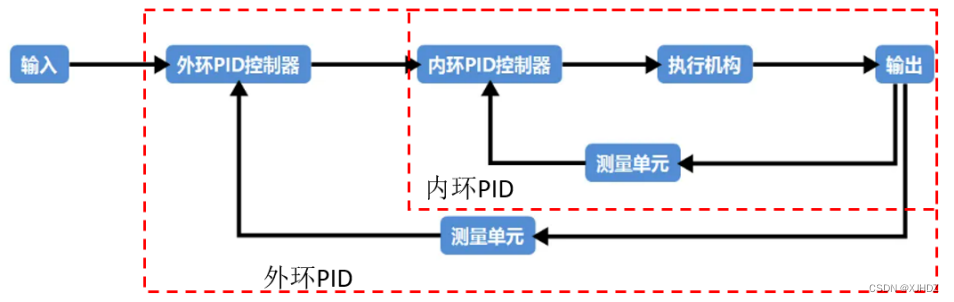
2.串级PID
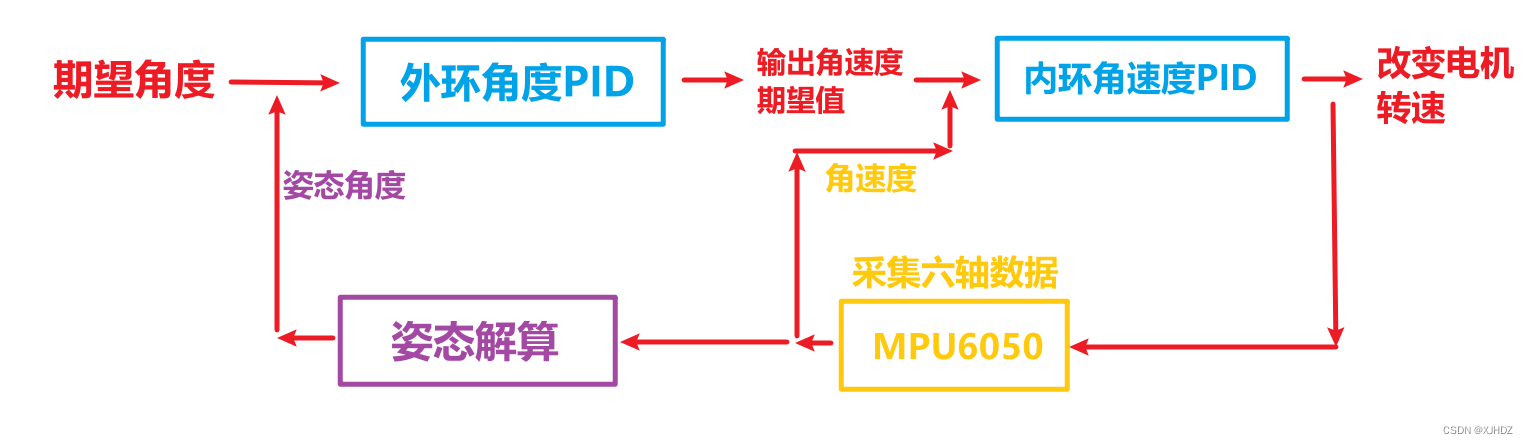
3.飞控的控制系统
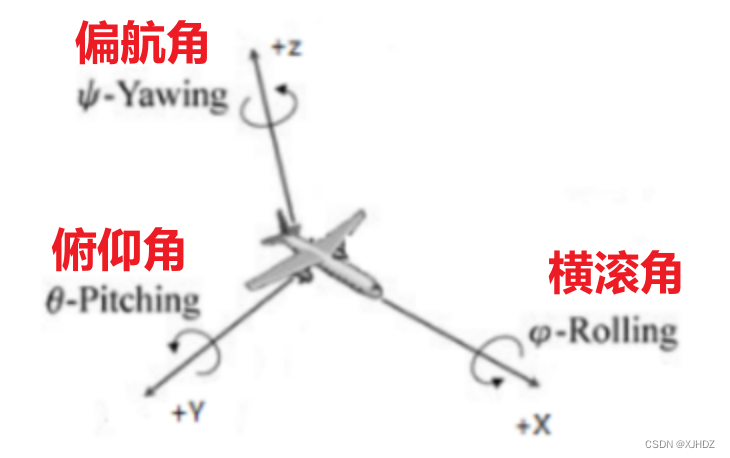
4.姿态解算
一.硬件设计(简)
【主控】
1.电源:3.7V锂电池供电 - DCDC升压至5V - LDO稳压3.3V
2.USB - 上位机
3.SPI - NRF24L01无线通讯
4.I2C - MPU6050陀螺仪
5.4个PWM
6.主控STM32F103C8T6
【遥控】
1.电源:3.7V锂电池供电 - LDO稳压3.3V
2.I2C - AT24CO2
3.4个ADC - 两个遥感
4.8个IO口 - 8个按键
5.SPI - NRF24L01无线通讯
6.主控STM32F103C8T6
二.主控程序
【MPU6050读取飞控三轴加速度、角速度 并且 卡尔曼滤波】
通过 MPU6050 寄存器手册:我们需要读取的三轴加速度和三轴角速度位于寄存器 0x3B~0X48,读取数据后,需要合成 16bit 的数据。
- //从 0x3B 读取 6 个字节放到 buffer 里面
- #define Acc_Read() i2cRead(0x68, 0X3B,6,buffer)
-
- //从 0x43 读取 6 个字节放到 buffer 里面
- #define Gyro_Read() i2cRead(0x68, 0x43,6,&buffer[6])
-
- void MpuGetData(void) //读取陀螺仪数据加滤波
- {
- uint8_t i;
- uint8_t buffer[12];
-
- Acc_Read();//读取加速度
- Gyro_Read();//读取角速度
-
- for(i=0;i<6;i++)
- {
- //整合为 16bit,并减去水平静止校准值
- pMpu[i] = (((int16_t)buffer[i<<1] << 8) | buffer[(i<<1)+1])-MpuOffset[i];
-
- if(i < 3)//对加速度做卡尔曼滤波
- {
- {
- //卡尔曼滤波的数据初始化,这个 8192 是初始化默认 1 个 g 的加速度
- static struct _1_ekf_filter ekf[3] = {{0.02,0,0,0,0.001,0.543}
- {0.02,0, 0,0,0.001,0.543},{0.02,0, 0,0,0.001,0.543}};
- kalman_1(&ekf[i],(float)pMpu[i]); //调用一维卡尔曼滤波函数
- pMpu[i] = (int16_t)ekf[i].out;//卡尔曼滤波输出
- }
- }
- if(i > 2)//以下对角速度做一阶低通滤波
- {
- uint8_t k=i-3;
- const float factor = 0.15f; //滤波因素,因数越小,滤波力度越大
- static float last_mpuData[3];
- //滤波并保存滤波数据
- last_mpuData[k] = last_mpuData[k] * (1 - factor) + pMpu[i] * factor;
- pMpu[i] = last_mpuData[k];//滤波输出
- }
- }
- }

【遥控数据解析】
- void RC_Analy(void)
- {
- static uint16_t cnt;
-
- if(NRF24L01_RxPacket(RC_rxData)==SUCCESS)
- {
- uint8_t i;
- uint8_t CheckSum=0;
- uint16_t thr;
- cnt = 0;
- for(i=0;i<31;i++)
- {
- CheckSum += RC_rxData[i]; //检查数据的数量是否是31个
- }
- if(RC_rxData[31]==CheckSum && RC_rxData[0]==0xAA && RC_rxData[1]==0xAF) //如果接收到的遥控数据正确
- {
- Remote.roll = ((uint16_t)RC_rxData[4]<<8) | RC_rxData[5]; //通道1
- Remote.roll = LIMIT(Remote.roll,1000,2000);
- Remote.pitch = ((uint16_t)RC_rxData[6]<<8) | RC_rxData[7]; //通道2
- Remote.pitch = LIMIT(Remote.pitch,1000,2000);
- Remote.thr = ((uint16_t)RC_rxData[8]<<8) | RC_rxData[9]; //通道3
- Remote.thr = LIMIT(Remote.thr,1000,2000);
- Remote.yaw = ((uint16_t)RC_rxData[10]<<8) | RC_rxData[11]; //通道4
- Remote.yaw = LIMIT(Remote.yaw,1000,2000);
- Remote.AUX1 = ((uint16_t)RC_rxData[12]<<8) | RC_rxData[13]; //通道5 左上角按键都属于通道5
- Remote.AUX1 = LIMIT(Remote.AUX1,1000,2000);
- Remote.AUX2 = ((uint16_t)RC_rxData[14]<<8) | RC_rxData[15]; //通道6 右上角按键都属于通道6
- Remote.AUX2 = LIMIT(Remote.AUX2,1000,2000);
- Remote.AUX3 = ((uint16_t)RC_rxData[16]<<8) | RC_rxData[17]; //通道7 左下边按键都属于通道7
- Remote.AUX3 = LIMIT(Remote.AUX3,1000,2000);
- Remote.AUX4 = ((uint16_t)RC_rxData[18]<<8) | RC_rxData[19]; //通道8 右下边按键都属于通道6
- Remote.AUX4 = LIMIT(Remote.AUX4,1000,4000);
-
- {
- const float roll_pitch_ratio = 0.04f;
- const float yaw_ratio = 0.3f;
-
- pidPitch.desired =-(Remote.pitch-1500)*roll_pitch_ratio; //将遥杆值作为飞行角度的期望值
- pidRoll.desired = -(Remote.roll-1500)*roll_pitch_ratio;
- if(Remote.yaw>1820)
- {
- pidYaw.desired -= yaw_ratio;
- }
- else if(Remote.yaw <1180)
- {
- pidYaw.desired += yaw_ratio;
- }
- }
- remote_unlock();
- }
- }
- //如果3秒没收到遥控数据,则判断遥控信号丢失,飞控在任何时候停止飞行,避免伤人。
- //意外情况,使用者可紧急关闭遥控电源,飞行器会在3秒后立即关闭,避免伤人。
- //立即关闭遥控,如果在飞行中会直接掉落,可能会损坏飞行器。
- else
- {
-
-
- cnt++;
- if(cnt>500)
- {
- cnt = 0;
- ALL_flag.unlock = 0;
- NRF24L01_init();
- }
- }
- }
【PID控制器的设计】
- void FlightPidControl(float dt)
- {
- volatile static uint8_t status=WAITING_1;
-
- switch(status)
- {
- case WAITING_1: //等待解锁
- if(ALL_flag.unlock)
- {
- status = READY_11;
- }
- break;
- case READY_11: //准备进入控制
- pidRest(pPidObject,6); //批量复位PID数据,防止上次遗留的数据影响本次控制
-
- Angle.yaw = pidYaw.desired = pidYaw.measured = 0; //锁定偏航角
-
- status = PROCESS_31;
-
- break;
- case PROCESS_31: //正式进入控制
- if(Angle.pitch<-50||Angle.pitch>50||Angle.roll<-50||Angle.roll>50)//倾斜检测,大角度判定为意外情况,则紧急上锁
- if(Remote.thr>1200)//当油门的很低时不做倾斜检测
- ALL_flag.unlock = EMERGENT;//打入紧急情况
-
- pidRateX.measured = MPU6050.gyroX * Gyro_G; //内环测量值 角度/秒
- pidRateY.measured = MPU6050.gyroY * Gyro_G;
- pidRateZ.measured = MPU6050.gyroZ * Gyro_G;
-
- pidPitch.measured = Angle.pitch; //外环测量值 单位:角度
- pidRoll.measured = Angle.roll;
- pidYaw.measured = Angle.yaw;
-
- pidUpdate(&pidRoll,dt); //调用PID处理函数来处理外环 横滚角PID
- pidRateX.desired = pidRoll.out; //将外环的PID输出作为内环PID的期望值即为串级PID
- pidUpdate(&pidRateX,dt); //再调用内环
-
- pidUpdate(&pidPitch,dt); //调用PID处理函数来处理外环 俯仰角PID
- pidRateY.desired = pidPitch.out;
- pidUpdate(&pidRateY,dt); //再调用内环
-
- CascadePID(&pidRateZ,&pidYaw,dt); //也可以直接调用串级PID函数来处理
- break;
- case EXIT_255: //退出控制
- pidRest(pPidObject,6);
- status = WAITING_1;//返回等待解锁
- break;
- default:
- status = EXIT_255;
- break;
- }
- if(ALL_flag.unlock == EMERGENT) //意外情况,请使用遥控紧急上锁,飞控就可以在任何情况下紧急中止飞行,锁定飞行器,退出PID控制
- status = EXIT_255;
- }
【4路PWM电机驱动】
- void TIM2_PWM_Config(void)
- {
- TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
- TIM_OCInitTypeDef TIM_OCInitStructure;
- GPIO_InitTypeDef GPIO_InitStructure;
- /* 使能 GPIOA 时钟时钟 */
- RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);
- GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0 | GPIO_Pin_1 | GPIO_Pin_2 |
- GPIO_Pin_3;
- GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
- GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
- GPIO_Init(GPIOA, &GPIO_InitStructure);
- /* 使能定时器 2 时钟 */
- RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);
- /* Time base configuration */
- TIM_TimeBaseStructure.TIM_Period = 999; //定时器计数周期 0-999 1000
- TIM_TimeBaseStructure.TIM_Prescaler = 8; //设置预分频:8+1 分频 8K PWM 频率
- TIM_TimeBaseStructure.TIM_ClockDivision = 0; //设置时钟分频系数:不分频
- TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //向上计数模式
- TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
- /* PWM1 Mode configuration: Channel */
- TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1; //配置为 PWM 模式 1
- TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;
- TIM_OCInitStructure.TIM_Pulse = 0;
- //设置跳变值,当计数器计数到这个值时,电平发生跳变(即占空比) 初始值 0
- TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;
- //当定时器计数值小于定时设定值时为高电平
- /* 使能通道 1 */
- TIM_OC1Init(TIM2, &TIM_OCInitStructure);
- TIM_OC1PreloadConfig(TIM2, TIM_OCPreload_Enable);
- /* 使能通道 2 */
- TIM_OC2Init(TIM2, &TIM_OCInitStructure);
- TIM_OC2PreloadConfig(TIM2, TIM_OCPreload_Enable);
- /* 使能通道 3 */
- TIM_OC3Init(TIM2, &TIM_OCInitStructure);
- TIM_OC3PreloadConfig(TIM2, TIM_OCPreload_Enable);
- /* 使能通道 4 */
- TIM_OC4Init(TIM2, &TIM_OCInitStructure);
- TIM_OC4PreloadConfig(TIM2, TIM_OCPreload_Enable);
- TIM_ARRPreloadConfig(TIM2, ENABLE); // 使能 TIM2 重载寄存器 ARR
- TIM_Cmd(TIM2, ENABLE); //使能定时器 2
- }
【解锁 - 启动步骤 - 电机动力分配】
- void MotorControl(void)
- {
- volatile static uint8_t status=WAITING_1;
-
-
- if(ALL_flag.unlock == EMERGENT) //意外情况,请使用遥控紧急上锁,飞控就可以在任何情况下紧急中止飞行,锁定飞行器,退出PID控制
- status = EXIT_255;
- switch(status)
- {
- case WAITING_1: //等待解锁
- MOTOR1 = MOTOR2 = MOTOR3 = MOTOR4 = 0; //如果锁定,则电机输出都为0
- if(ALL_flag.unlock)
- {
- status = WAITING_2;
- }
- case WAITING_2: //解锁完成后判断使用者是否开始拨动遥杆进行飞行控制
- if(Remote.thr>1100)
- {
- low_thr_cnt_quiet=0;
- low_thr_cnt=0;
- pidRest(pPidObject,6);
- status = PROCESS_31;
- }
- break;
- case PROCESS_31:
- {
- int16_t temp,thr;
- temp = Remote.thr -1000; //油门+定高输出值
- //油门比例规划
- thr = 250+0.45f * temp;
-
- if(temp<10) //自动关停判断
- {
- if(low_thr_cnt<1500)
- low_thr_cnt++;
- thr = thr-(low_thr_cnt*0.6);//油门摇杆值慢慢降为0
- if(MPU6050.accZ<8500&&MPU6050.accZ>7800)
- {
- low_thr_cnt++;
- if(low_thr_cnt>600)//1800ms
- {
- thr = 0;
-
- pidRest(pPidObject,6);
- MOTOR1 = MOTOR2 = MOTOR3 = MOTOR4 =0;
- status = WAITING_2;
-
- break;
- }
- }
- }
- else low_thr_cnt=0;
- MOTOR1 = MOTOR2 = MOTOR3 = MOTOR4 = LIMIT(thr,0,700); //留100给姿态控制
-
- //以下输出的脉冲分配取决于电机PWM分布与飞控坐标体系。请看飞控坐标体系图解,与四个电机PWM分布分布
- // 机头
- // PWM3 ♂ PWM1
- // * *
- // * *
- // * *
- // *
- // * *
- // * *
- // * *
- // PWM4 PWM2
- // pidRateX.out 横滚角串级PID输出 控制左右,可以看出1 2和3 4,左右两组电机同增同减
- // pidRateY.out 俯仰角串级PID输出 控制前后,可以看出2 3和1 4,前后两组电机同增同减
- // pidRateZ.out 横滚角串级PID输出 控制旋转,可以看出2 4和1 3,两组对角线电机同增同减
-
- // 正负号取决于算法输出 比如输出是正的话 往前飞必然是尾巴两个电机增加,往右飞必然是左边两个电机增加
-
- MOTOR1 += + pidRateX.out + pidRateY.out + pidRateZ.out;//; 姿态输出分配给各个电机的控制量
- MOTOR2 += + pidRateX.out - pidRateY.out - pidRateZ.out ;//;
- MOTOR3 += - pidRateX.out + pidRateY.out - pidRateZ.out;
- MOTOR4 += - pidRateX.out - pidRateY.out + pidRateZ.out;//;
- }
- break;
- case EXIT_255:
- MOTOR1 = MOTOR2 = MOTOR3 = MOTOR4 = 0; //如果锁定,则电机输出都为0
- status = WAITING_1;
- break;
- default:
- break;
- }
-
-
- TIM2->CCR1 = LIMIT(MOTOR1,0,1000); //更新PWM
- TIM2->CCR2 = LIMIT(MOTOR2,0,1000);
- TIM2->CCR3 = LIMIT(MOTOR3,0,1000);
- TIM2->CCR4 = LIMIT(MOTOR4,0,1000);
- }
【水平校准】
MPU6050 获取的数值要减去水平静止校准值才是真正的飞控可用数据
- void MpuGetOffset(void) //校准
- {
- int32_t buffer[6]={0};
- int16_t i;
- uint8_t k=30;
- const int8_t MAX_GYRO_QUIET = 5;
- const int8_t MIN_GYRO_QUIET = -5;
- /* wait for calm down */
- int16_t LastGyro[3] = {0};
- int16_t ErrorGyro[3];
- /* set offset initial to zero */
-
- memset(MpuOffset,0,12);
- MpuOffset[2] = 8192; //set offset from the 8192
-
- TIM_ITConfig( //使能或者失能指定的TIM中断
- TIM1,
- TIM_IT_Update ,
- DISABLE //使能
- );
- while(k--)//30次静止则判定飞行器处于静止状态
- {
- do
- {
- delay_ms(10);
- MpuGetData();
- for(i=0;i<3;i++)
- {
- ErrorGyro[i] = pMpu[i+3] - LastGyro[i];
- LastGyro[i] = pMpu[i+3];
- }
- }while ((ErrorGyro[0] > MAX_GYRO_QUIET )|| (ErrorGyro[0] < MIN_GYRO_QUIET)//标定静止
- ||(ErrorGyro[1] > MAX_GYRO_QUIET )|| (ErrorGyro[1] < MIN_GYRO_QUIET)
- ||(ErrorGyro[2] > MAX_GYRO_QUIET )|| (ErrorGyro[2] < MIN_GYRO_QUIET)
- );
- }
-
- /* throw first 100 group data and make 256 group average as offset */
- for(i=0;i<356;i++)//水平校准
- {
- MpuGetData();
- if(100 <= i)//取256组数据进行平均
- {
- uint8_t k;
- for(k=0;k<6;k++)
- {
- buffer[k] += pMpu[k];
- }
- }
- }
-
- for(i=0;i<6;i++)
- {
- MpuOffset[i] = buffer[i]>>8;
- }
- TIM_ITConfig( //使能或者失能指定的TIM中断
- TIM1,
- TIM_IT_Update ,
- ENABLE //使能
- );
- FLASH_write(MpuOffset,6);//将数据写到FLASH中,一共有6个int16数据
- }
三.遥控程序
【摇杆ADC采集和转换】
配置 4 路 ADC 采集遥控摇杆值。DMA 自动采集,转换完成后自动将 ADC 结果存于ADC_ConvertedValue 。
- void ADC1_Mode_Config(void)
- {
- DMA_InitTypeDef DMA_InitStructure;
- ADC_InitTypeDef ADC_InitStructure;
-
- /* DMA channel1 configuration */
- DMA_DeInit(DMA1_Channel1);
- DMA_InitStructure.DMA_PeripheralBaseAddr = ADC1_DR_Address; //ADC 结果寄存器地址
- DMA_InitStructure.DMA_MemoryBaseAddr = (u32)&ADC_ConvertedValue;//输入数组地址地址
- DMA_InitStructure.DMA_DIR = DMA_DIR_PeripheralSRC;
- DMA_InitStructure.DMA_BufferSize = 4;//转换 4 路
- DMA_InitStructure.DMA_PeripheralInc = DMA_PeripheralInc_Disable;//外设地址固定
- DMA_InitStructure.DMA_MemoryInc = DMA_MemoryInc_Enable; //内存地址固定
- DMA_InitStructure.DMA_PeripheralDataSize = DMA_PeripheralDataSize_HalfWord; //半字(12bit ADC存放)
- DMA_InitStructure.DMA_MemoryDataSize = DMA_MemoryDataSize_HalfWord;
- DMA_InitStructure.DMA_Mode = DMA_Mode_Circular; //循环传输
- DMA_InitStructure.DMA_Priority = DMA_Priority_High;
- DMA_InitStructure.DMA_M2M = DMA_M2M_Disable;
- DMA_Init(DMA1_Channel1, &DMA_InitStructure);
-
- /* Enable DMA channel1 */
- DMA_Cmd(DMA1_Channel1, ENABLE);
-
- /* ADC1 configuration */
- ADC_InitStructure.ADC_Mode = ADC_Mode_Independent; //独立 ADC 模式
- ADC_InitStructure.ADC_ScanConvMode = ENABLE ; //禁止扫描模式,扫描模式用于多通道采集
- ADC_InitStructure.ADC_ContinuousConvMode = ENABLE; //开启连续转换模式,即不停地进行 ADC 转换
- ADC_InitStructure.ADC_ExternalTrigConv = ADC_ExternalTrigConv_None; //不使用外部触发转换
- ADC_InitStructure.ADC_DataAlign = ADC_DataAlign_Right; //采集数据右对齐
- ADC_InitStructure.ADC_NbrOfChannel = 4; //4 路 ADC 通道
- ADC_Init(ADC1, &ADC_InitStructure);
-
- /*配置 ADC 时钟,为 PCLK2 的 8 分频,即 6MHz,ADC 频率最高不能超过 14MHz*/
- RCC_ADCCLKConfig(RCC_PCLK2_Div8);
-
- /*配置 ADC1 的通道 11 为 55. 5 个采样周期,序列为 1 */
- ADC_RegularChannelConfig(ADC1, ADC_Channel_0, 1, ADC_SampleTime_55Cycles5);
- ADC_RegularChannelConfig(ADC1, ADC_Channel_1, 2, ADC_SampleTime_55Cycles5);
- ADC_RegularChannelConfig(ADC1, ADC_Channel_2, 3, ADC_SampleTime_55Cycles5);
- ADC_RegularChannelConfig(ADC1, ADC_Channel_3, 4, ADC_SampleTime_55Cycles5);
-
- /* 使能 DMA 外设*/
- ADC_DMACmd(ADC1, ENABLE);
-
- /*使能 ADC1 外设 */
- ADC_Cmd(ADC1, ENABLE);
-
- /*复位校准寄存器 */
- ADC_ResetCalibration(ADC1);
-
- /*等待校准寄存器复位完成 */
- while(ADC_GetResetCalibrationStatus(ADC1));
- /* ADC 校准 */
- ADC_StartCalibration(ADC1);
- /* 等待校准完成*/
- while(ADC_GetCalibrationStatus(ADC1));
- /* 软件启动 ADC 转换 */
- ADC_SoftwareStartConvCmd(ADC1, ENABLE);
- }
每 10ms 进行一次 ADC 数据的转换为航模遥控数据:
12bitADC(0~4096)*0.25 +1000 ≈ 航模标准数据 1000~2000
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/秋刀鱼在做梦/article/detail/872665
推荐阅读
相关标签

