
热门标签
热门文章
- 1hadoop的三大核心组件之HDFS和YARN_hdfs yern
- 2【实体对齐·HGCN】Jointly Learning Entity and Relation Representations for Entity Alignment
- 3Linux系统简介_linux硬件设备由什么直接管理
- 4Git入门到精通(大全)_git从入门到精通
- 5软件测试只会“点点点”,凭什么让开发看的起你?_软件测试点点点
- 6echarts的简单使用_echarts简单使用
- 7Introduction to 3D Game Programming with DirectX 12 学习笔记之 --- 第七章:在Direct3D中绘制(二)_direct3d画圆
- 8HarmonyOS Next 使用Web获取相机拍照图片案例_onshowfileselector返回值
- 9用70行Python编写一个概率编程语言_pyro教材 概率编程
- 10自动化搞钱:7个最强免费AI工具,10倍速提升赚钱、超过99%的人_7個最強免費ai工具,10倍速提升賺錢、自媒體內容創作、工作效率,超過99%的人
当前位置: article > 正文
【STM32】HAL库 PWM驱动舵机_stm32hal驱动舵机
作者:秋刀鱼在做梦 | 2024-07-19 10:14:07
赞
踩
stm32hal驱动舵机
系列文章目录
【STM32】HAL库 新建MDK工程
【STM32】HAL库 定时器中断
【STM32】HAL库 PWM驱动LED呼吸灯
前言
使用按键控制PWM,驱动舵机
一、SG90舵机
舵机的控制一般需要一个20ms左右的时基脉冲,脉冲的高电平部分一般为0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关系是这样的:
| 高电平时间 | 旋转角度 |
|---|---|
| 0.5ms | 0度 |
| 1.0ms | 45度 |
| 1.5ms | 90度 |
| 2.0ms | 135度 |
| 2.5ms | 180度 |
计数器自动重装值为ARR,0.5ms的计数次数为h。
ARR/ 20 = h / 0.5,h = ARR /40。
1ms旋转45度,1ms的计数次数为0.5ms的两倍 ,求系数k
ARR/ 40 * 2 = 45 *k + ARR/40,k = ARR/ 1800。
1ms的占空比为1 / 20
CCR = 占空比 * ARR = ARR / 20 = ARR/ 40 * 2
CCR = 角度 * ARR / 1800 + ARR /40
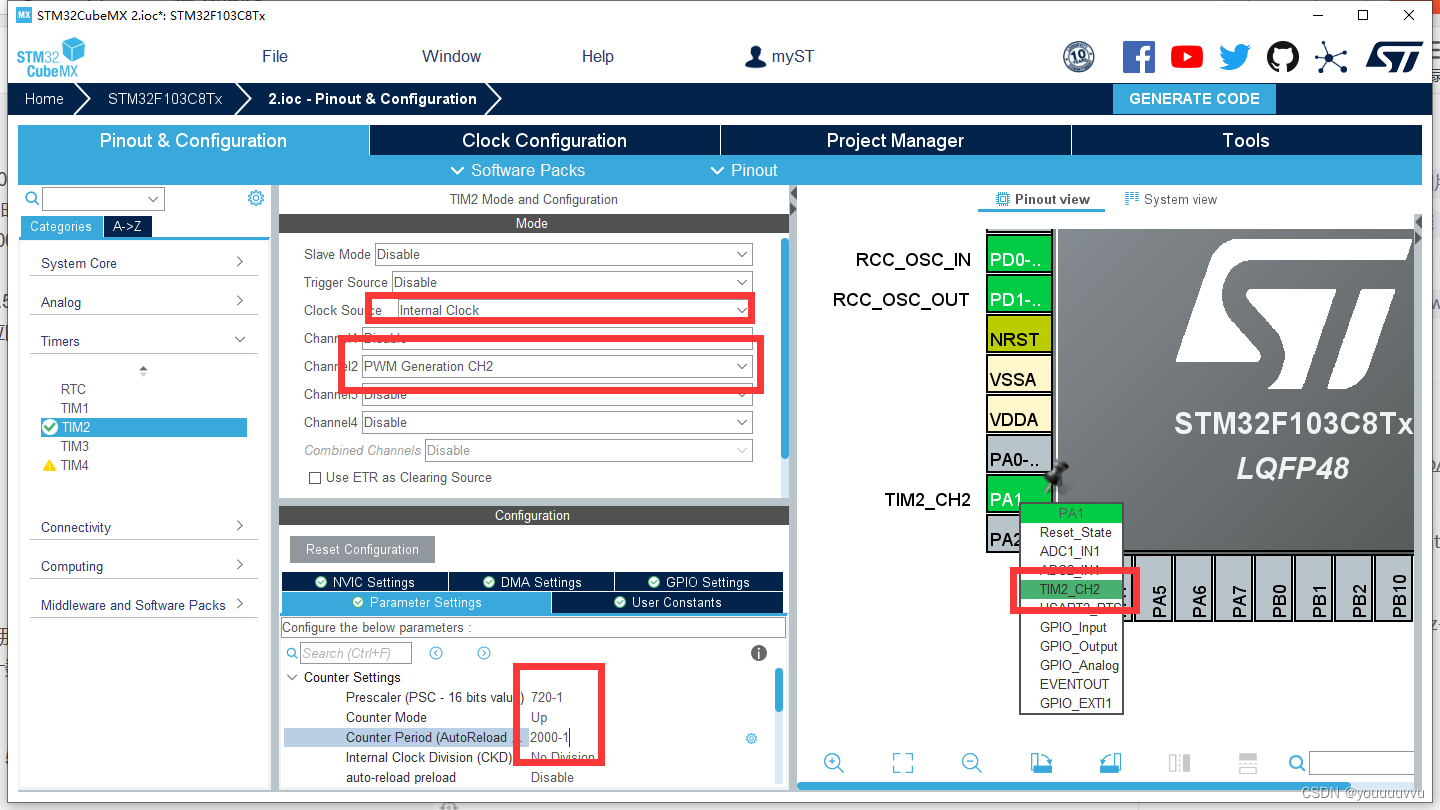
二、STM32CubeMX设置
舵机的控制一般需要一个20ms左右的时基脉冲,所以一个周期的时间为20ms,50Hz。舵机的死区时间为5us,所以重装载值需要小于4000 = 20ms/5us。重装载值取2000,50Hz = 72MHz / 分频系数/2000 ,分频系数为720。
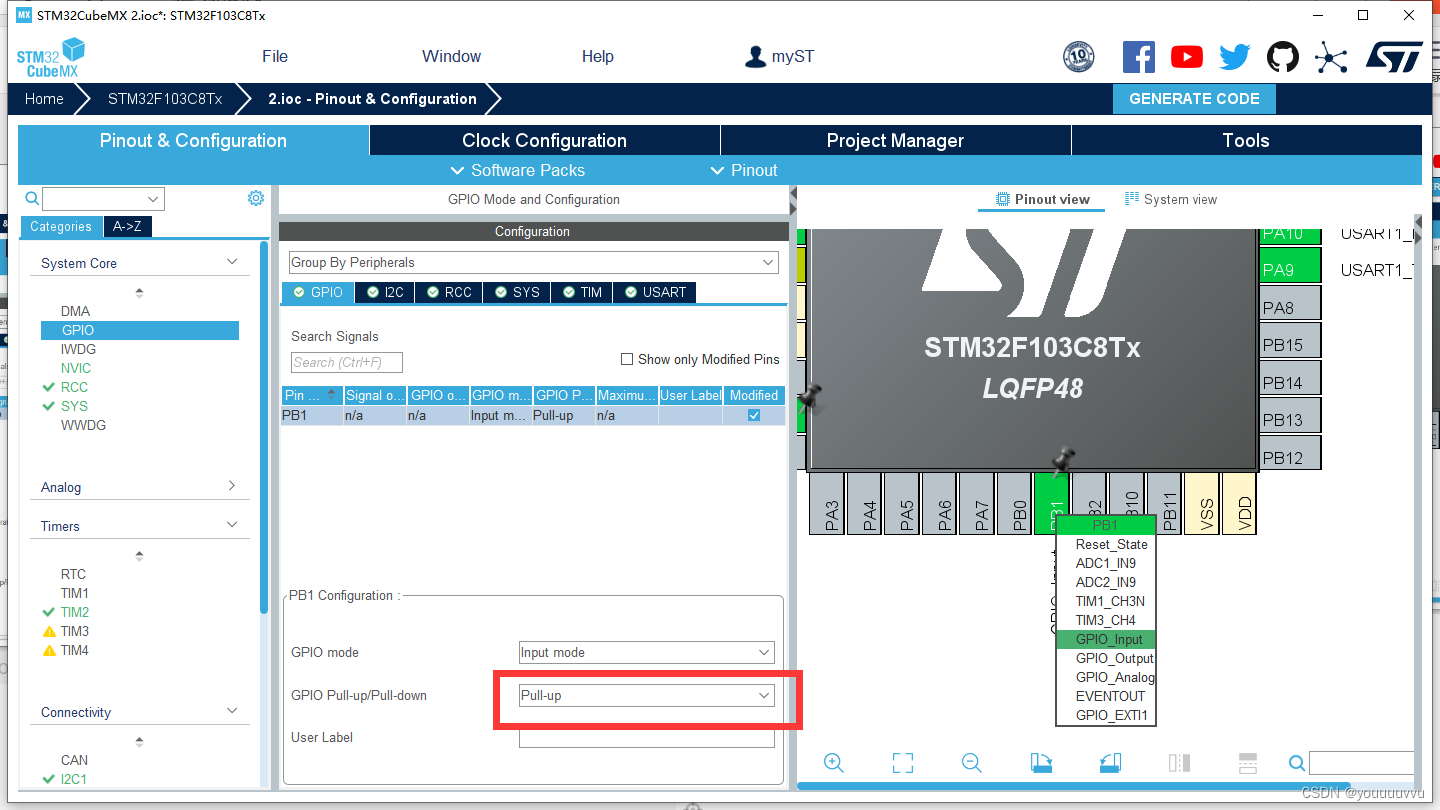
三、代码
HAL_TIM_PWM_Start(&htim2, TIM_CHANNEL_2);
- 1
while (1) { /* USER CODE END WHILE */ /* USER CODE BEGIN 3 */ if(HAL_GPIO_ReadPin(GPIOB,GPIO_PIN_1) == GPIO_PIN_RESET) { HAL_Delay(20); while (HAL_GPIO_ReadPin(GPIOB, GPIO_PIN_1) == GPIO_PIN_RESET); HAL_Delay(20); Angle += 30; if (Angle > 180) { Angle = 0; } } __HAL_TIM_SET_COMPARE(&htim2, TIM_CHANNEL_2,Angle * (htim2.Init.Period + 1) / 1800 + (htim2.Init.Period + 1) / 40); } /* USER CODE END 3 */

- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/秋刀鱼在做梦/article/detail/850869
推荐阅读

相关标签

