
- 1从测试小白成功转型自动化测试,我是如何一步步掌握坚持下来的?_没有自动化测试经验转自动化好难哦
- 2探索未来文本检测:LLM-Detect AI 生成文本开源项目
- 3adb server version (31) doesn't match this client (41); killing...
- 4FLinkSQL+FlinkCDC_java flink cdc sql 多个sql合并为一个任务
- 5python前后端分离-Vue框架二
- 6python 打包exe pyinstaller笔记_pyinstaller添加多个--hidden-import
- 7如何用 Python 实现自动化监控文件夹完成服务部署_python 监测oss目录下数据变动 获取子文件夹并进来一个文件传输一个文件一直到240
- 8Stats in management UI are disabled on this node
- 9几个div在一行的三种方法
- 10『NLP打卡营学习笔记』实践课1:使用预训练词向量改善分类模型效果_预训练词向量有什么用
2023年智能车大赛电磁组开源项目(负压电磁省奖),新手学习指南,原理讲解,控制基本算法思路。圆环,出入库,避障全元素代码,开源项目。_全国大学生智能车大赛电磁组避障
赞
踩
注:项目使用了freertos操作系统,原理图、layout,驱动代码大部分都是自己弄的,因此本代码不兼容逐飞或者邱龙等公司的开源学习板,你也可以在我的代码上更改引脚定义,如果你不太懂芯片驱动开发,还是尽量直接参考我的pcb即可。
注:项目使用了freertos操作系统,原理图、layout,驱动代码大部分都是自己弄的,因此本代码不兼容逐飞或者邱龙等公司的开源学习板,你也可以在我的代码上更改引脚定义,如果你不太懂芯片驱动开发,还是尽量直接参考我的pcb即可。
注:项目使用了freertos操作系统,原理图、layout,驱动代码大部分都是自己弄的,因此本代码不兼容逐飞或者邱龙等公司的开源学习板,你也可以在我的代码上更改引脚定义,如果你不太懂芯片驱动开发,还是尽量直接参考我的pcb即可。
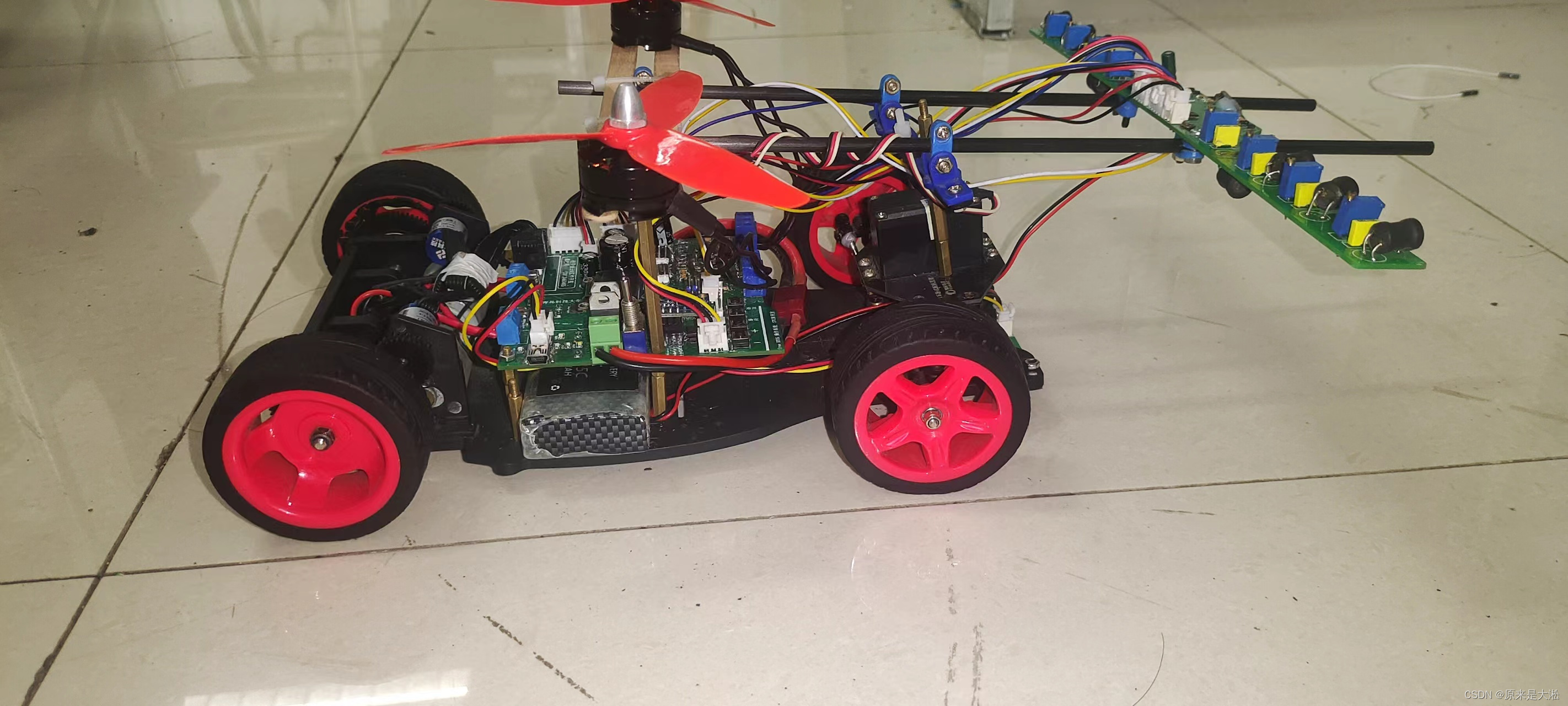
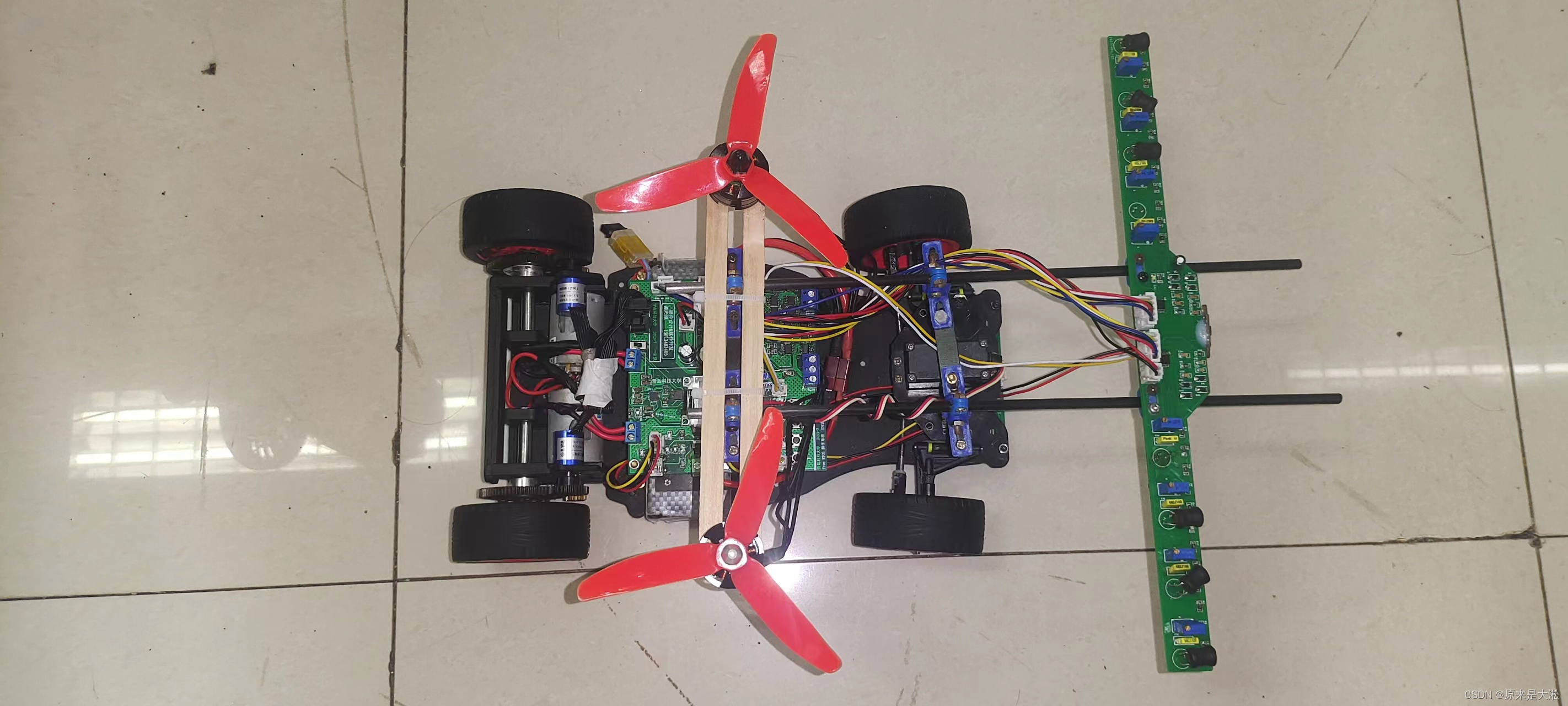
博主的好多东西都集成在主板上,
博主一共就只有三个pcb
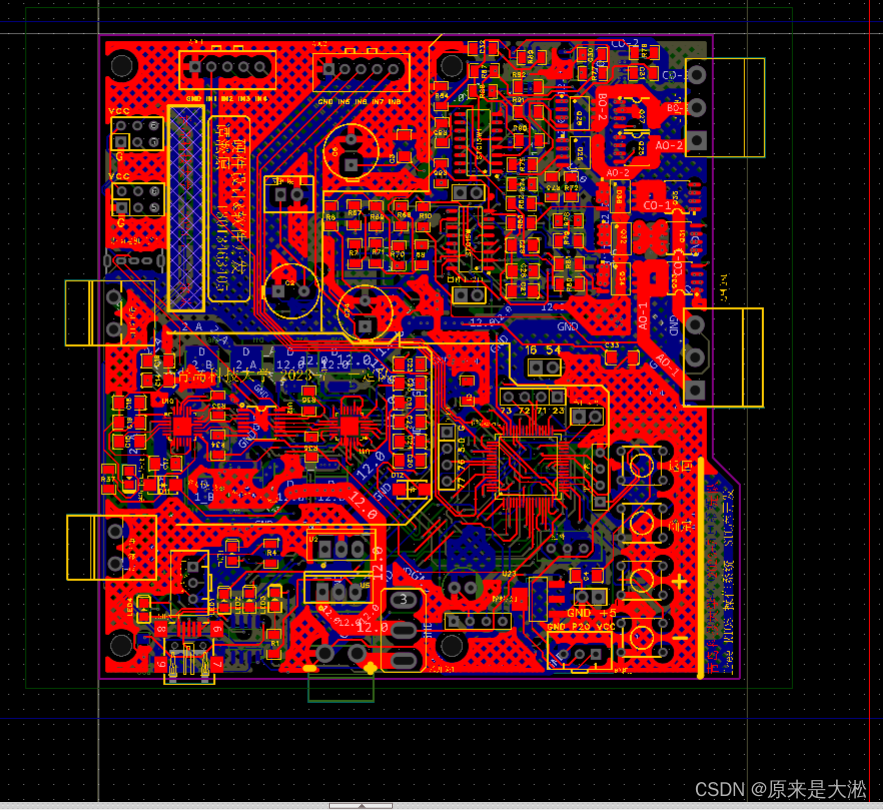
1.4层主板(无刷驱动、有刷驱动、主控等等接口都在上面)
2.2层运放(采集和放大)
3.一层干簧管板
废话不多说,先上项目:
链接:https://pan.baidu.com/s/1LzKuOeY2qGKwkRd6Xu_Tig?pwd=1230
提取码:1230

注意:需要任何工程源文件或者任何相关资料;可找博主拿,博主保证所有东西百分之百开源;开源不易。切勿盗卖。
如果有不明白的,博主可提供指导与解释。但是切勿盗卖。
负压智能车主要包括这几部分:
运放部分:
首先我们要了解LC电磁感应。LC感应是指通过改变磁场的大小或方向,产生感应电动势的现象。根据法拉第电磁感应定律,当磁场的变化率发生变化时,导体中将产生感应电流。这种感应电流的产生是由于磁场的变化引起了导体中的自由电子的运动,从而产生了感应电动势。我们通过并联指定大小的电容和电感,当有电磁场的磁感线穿过电感时,在这个并联的体系里面就会产生感应电动势,单片机需要通过acd采集获取电压大小但是,感应电动势有的时候太小了(可能才几毫伏)。我们此时就需要运放芯片将感应信号放大,这样一来电平可以达到2-3V左右,这个时候才能让单片机进行adc采集。
当我们采集到acd的大小后,就可以通过比较两边的大小值,然后判断小车偏离中心电磁线的距离。以此来控制小车转向。

当然,电感的排布也有很大的影响,这里我提供几个参考链接。
对于横电感,建议采用以下这个控制方法:
驱动部分:
驱动就是控制电机正反转,智能车通常包括左右两个轮子一共两个电机,但是负压组还包括负压电机。
有刷驱动
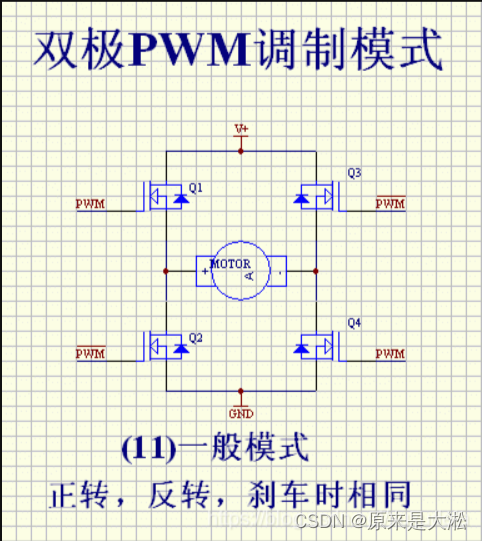
(1)双极模式,即电枢电压极性是正负交替的
优点:能正反转运行,启动快,调速精度高,动态性能好,调速静差小,调速范围大,能加速,减速,刹车,倒转,能在负载超过设定速度时,提供反向力矩,能克服电机轴承的静态摩擦力,产生非常低的转速。
缺点:控制电路复杂,对电路设计有很高的要求
解决思路:现有很多H桥驱动芯片可以应用,减少开发者的负担
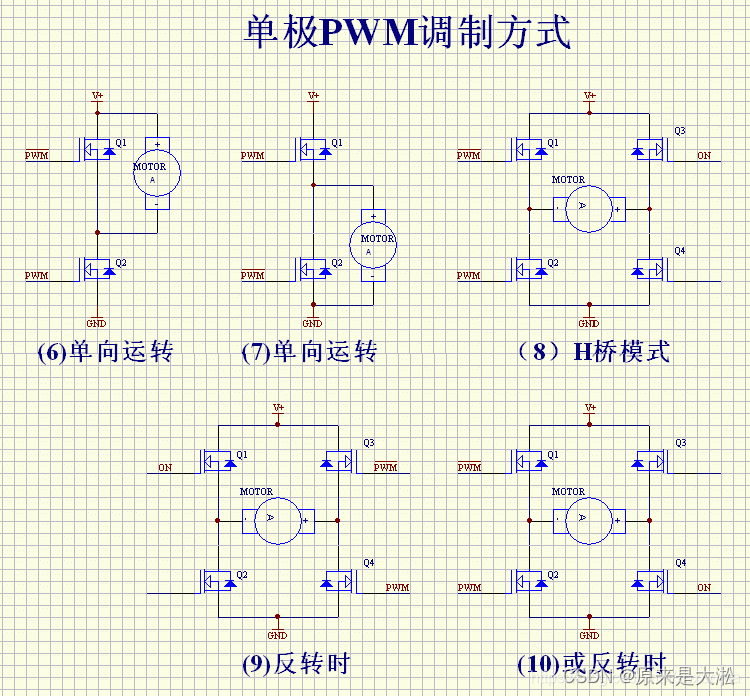
(2)单极模式,即电机电枢驱动电压极性是单一的
优点:启动快,能加速,刹车,能耗制动,能量反馈,调速性能不如双极模式好,但是相差不多,电机特性也比较好。如果接成H桥模式,也能实现反转。
在负载超速时也能提供反向力矩。
缺点:刹车时,不能减速到0,速度接近0速度时没有制动力。不能突然倒转。动态性能不好,调速静差稍大。
(3)受限单极模式,即除了单极调制外,能耗制动通路受到了限制。
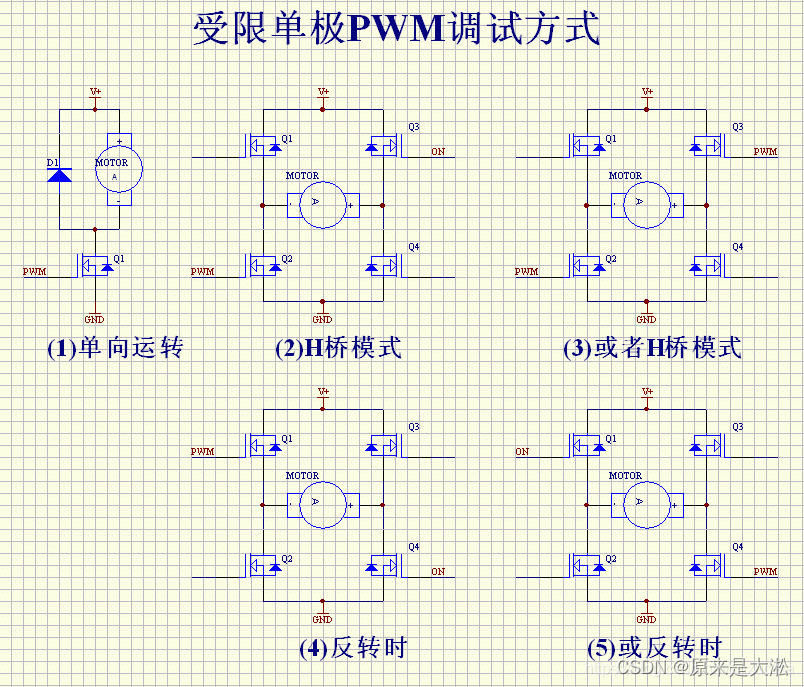
优点:控制电路简单,如果接成H桥模式,也能正反转。
缺点:不能刹车,不能能耗制动,在负载超过设定速度时不能提供反向力矩。
调速静差大,调速性能很差,稳定性也不好。
首先,这里的PWM和PWM 都是已经经过处理后,能直接驱动功率管的信号,而不是单片机输出的PWM信号,至于MOS管的驱动方法,这里不讨论。
注意点:
(1) PWM 信号是和PWM信号互补的,逻辑上互补,而不是电平的互补。
(2) 还有默认这两个信号已经经过了死区控制,不会产生同时导通的问题。
(3) 除了第一个图外,功率管上必须并联续流二极管,要么是MOS管里自带的,要么就是BJT再并联的,或者MOS管并联肖特基。
其实我们大家平时控制电机用的都是如图1所示的那种样子,
(4) 这种模式叫受限单极调制,只有加速和调速功能,是没有刹车功能的,电机速度下降靠负载摩擦,也没有负力矩。
比如说,设定速度是50%,但是电机因为外力速度达到了60%了,电机也不会减速,只有电机速度超过100%时,电机产生的反电动势超过了电源电压,才会产生反向力矩,那个另当别论。
像以前的有刷电动自行车采用的就是这种控制方法,只能加速,不能减速,速度控制也不精确,但是足够满足要求了。
其次,我们想要电机实现正反转,也只不过是用到了图2和图4的样子,
这个虽然是接成了H桥的样子,但是实际上还是受限单极调制,把图2的Q4拿掉,Q1变成一个二极管,电路就又变成了图1的样子。其他的图都同理。
单极调制和双极调制
刹车可行性分析:
如果想得到有刹车的功能,就必须使用一个与PWM信号互补的PWM信号。这个信号在PWM关断期间,为电机提供一个续流通道,相当于开关电源的同步续流吧,也有称之为同步整流。按道理,那个二极管也能提供续流通道如图6中的Q1,但是用MOS管作为续流通道有2个好处,
第一,导通压降低,比二极管发热更少,效率更高,
第二,二极管上不能产生反向电流,而MOS管可以通过反向电流
其实二极管的反向电流对于MOS管来讲是正向电流,
电机反电动势在PWM关断时间的伏秒数 大于 电源电压在PWM开通时间加在电机上的伏秒数,小于,那么电机会产生反向电流,使电机产生反向力矩,
因为直流永磁电机的力矩是正比例于电流的,反向电流就会产生反向力矩。视这个电流的大小,电机就能减速或者刹车了。而且电机上的这个反向电流还会在PWM开通时间回馈到电源中去,做到了能量回馈。如果电源是二次电池,那么这是有好处的,如果不是电池的话,会使母线电压升高,要做一些能量消耗的措施。
(1) 缓减速: 说白了,就是你的PWM占空比就能控制电机的转速,电机的转速会跟随的你PWM占空比变化,你的占空比加大,电机就会加速,你的占空比减小,电机就会减速
(2) 中减速: 但是如果你的占空比突然减到0,就相当于把电机短路了,这是急刹车,会不会损坏要看电机的内阻,功率,惯性,还要看功率管的过载能力。当然还考验电机的机械强度,因为这种刹车从表面上看,就好像直接用硬物把电机卡住的效果差不多,发出的声响也是十分巨大的金属声。
(3) 暴力速:把电机切换到反向运行状态,但是这种方法是有很大的隐患的,往往会造成器件损坏。
不过话又说回来了,那种受限单极PWM调制方法,只能使用这1种刹车或减速模式,既没有好的效果,又容易损伤器件。
所以如果需要电机带刹车的话,尽量使用单极调制或双极调制,不要使用受限单极调制模式。
双极模式
双极模式,只有H桥一种接法,而且4只管子同时工作。控制:当PWM占空比为50%时,电机保持静止状态,当PWM占空比大于50%时,电机正转,当PWM占空比小于50%时,电机反转。
其实当占空比为50%时,电机并不是静止的,而是在原地抖动,电机通电但是未线圈未实现极性反转。因为电机上的电流也是一个交流的,这个抖动能有效克服电机的静摩擦,使电机能快速启动,迅速反应,适用与需要动态性能好的场合。
当然了,单极和双极调制也可以把4只管子都关断,使电机自由减速,而不是靠方向力矩来进行减速。
此处,博主用的是双极性驱动方式。这种方式在驱动的时候有声音是正常的,因为类似与互补驱动一样,高电平正转,低电平反转,通过改变占空比来改变正反转和转速,注意:此处的pwm控制信号频率要避免在20Khz左右,实测1khz-15khz都可以。
注意:dev8701这个芯片比较贵,大概10r一个,而且是QFN封装,要求焊接技术比较强的才能好好的搞出来。购买的时候建议买6个。
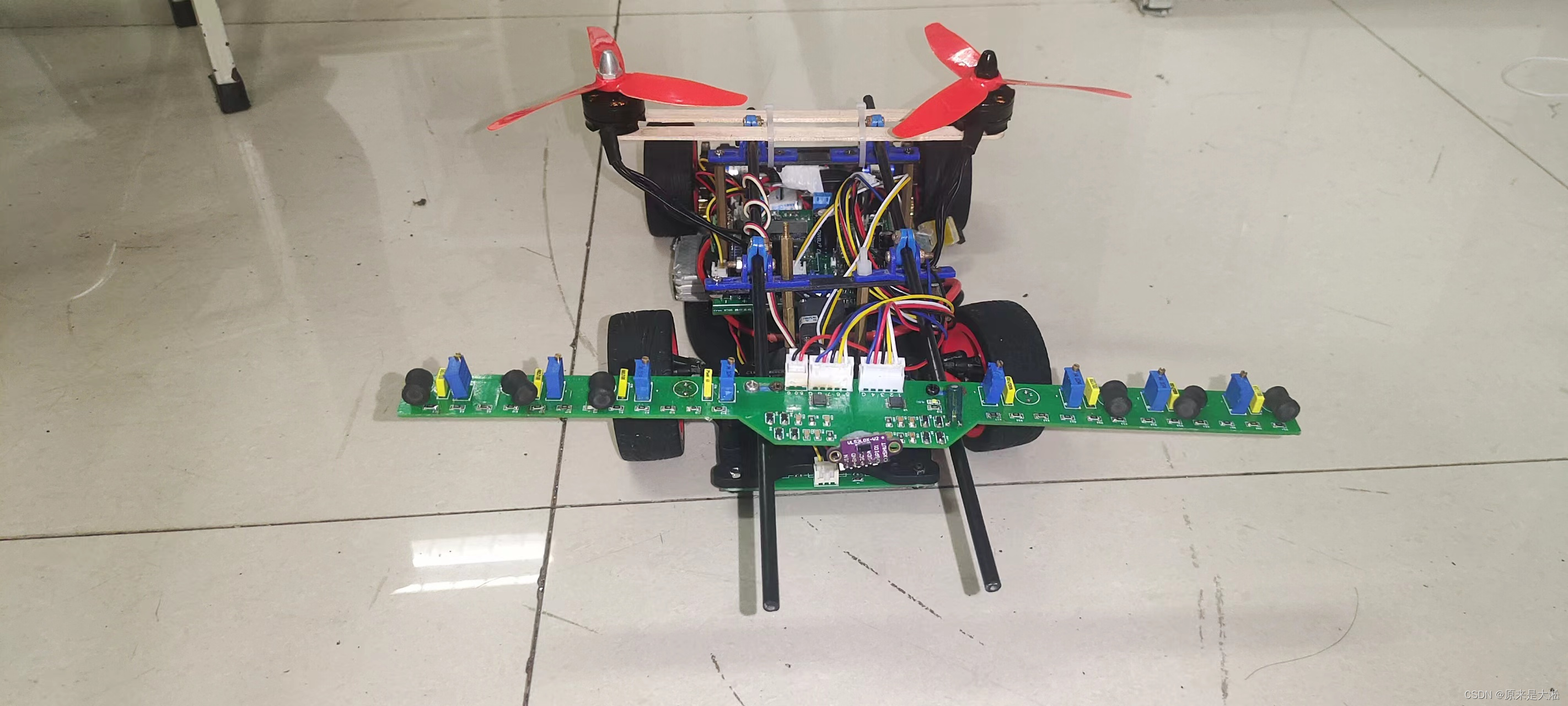
无刷驱动:
无刷电机主要是依靠强大的转速,带动扇叶产生大推力的引擎,这个力量压在智能车上,可以防止车速过快翻车。也可以增大摩擦力。
关于分类,具体不细说,大概分为有感和无感。三相无刷电机的控制思想大概是:通过检测反电动势获取转子的位置,然后给下一时刻与无刷电机中心转子相互吸引的的线圈通电,从而产生持续的吸力,通过改变通电的PWM的占空比从而可以控制转速。
具体的原理我这里不深入讲解。所有的源码及pcb原理图都开源,自己参考学习即可。
因为无刷负压不是必要的,而且难度比较大,搞不好就烧板,建议先让车完赛,再加负压风扇。此外,无刷电机建议单独电源供电(我的是所有供电用一个电池)。因为无刷电机会产生瞬时电动势,会使电源产生波纹,电压不稳定,从而间接的影响到adc采集的稳定性。
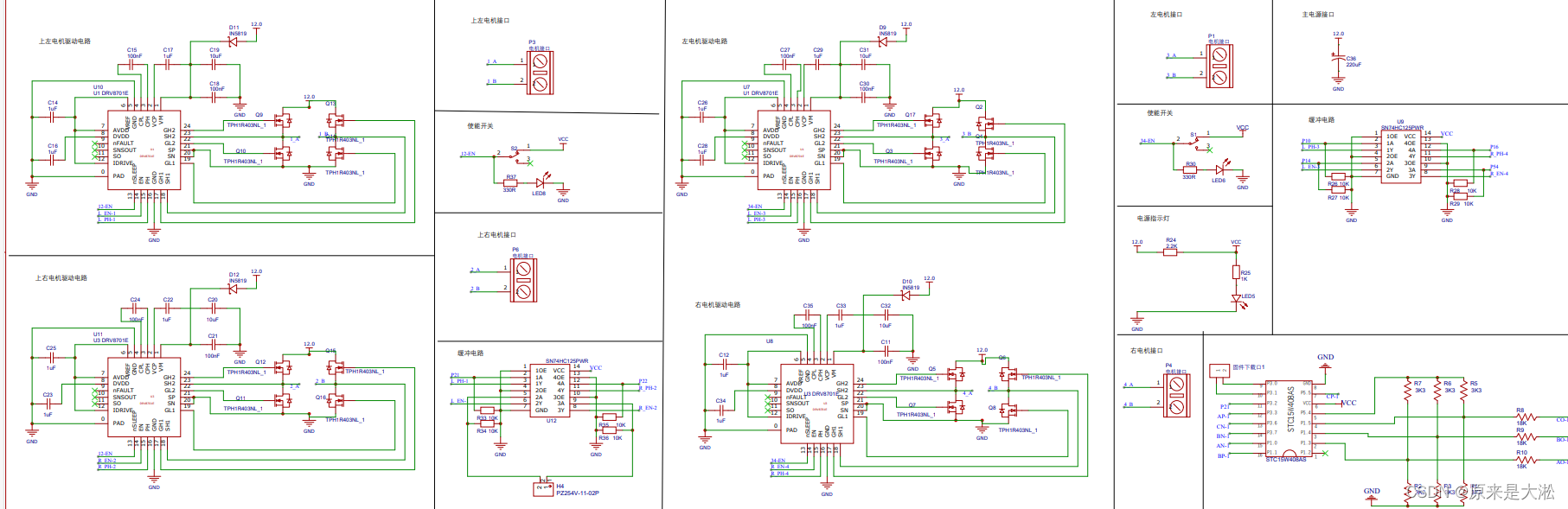
主板:
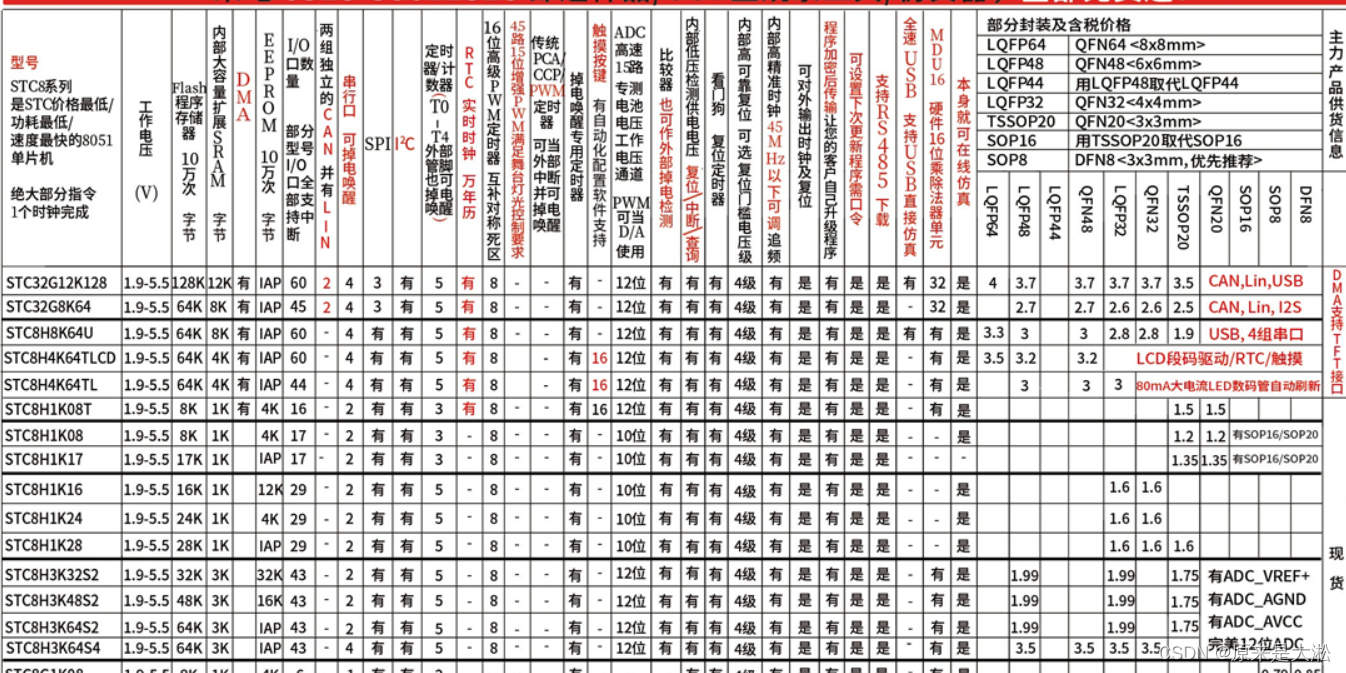
就是一个芯片,代码都在里面,博主用的是晶弘的STC32G128系列的,由于博主需要跑rtos的原因,因此需要ram比较大的芯片。
关于主板的话随便搞搞就行,主要是焊接的时候虚焊等问题。
干簧管板:
最简单的东西,就是用来入库的时候,检测地上磁铁的,当干簧管这个东西靠近磁铁时,会导通,否则是断开的。用来检测是不是改入库了。

最后给大家讲一讲这个比赛吧
1.智能车大赛比较花钱,光一个车模就是六七百。 博主总共花费1200元人民币不到。主要还是因为博主pcb板子改了三次。但是每一次算下来其中板子总成本100元。如果你采用博主的开源项目,除了车模,其他的大概总花销是200元。各种材料不用选逐飞官网购买。因为逐飞的贵好多倍。
2.智能车大赛目前水准已经降低很多。主要还是磨时间,调参数,各种pid控制,如果你没有足够的时间,建议多考虑。而且目前多出现“代代相传,人走码还在的说法”代码可以购买到,也可以用上一届的。这样一来,比赛含金量其实降低了很多。

