
热门标签
热门文章
- 1Flink Checkpoint 详解
- 2性能怪兽!香橙派 Kunpeng Pro 开发板深度测评,带你解锁无限可能!_香橙派 kunpeng pro 猫头虎
- 3视频汇聚EasyCVR平台H.265视频转码技术介绍、特点解析及应用_监控平台 转码
- 4【建议收藏】一万字图文并茂,终于有人把GPT的玩法整理全了
- 5【nlp】3.2 Transformer论文复现:1. 输入部分(文本嵌入层和位置编码器)_transformer复现
- 6关于在django项目中出现raise ImproperlyConfigured("The SECRET_KEY setting must not be empty.")个人解决方案
- 7两个阅读英文论文的免费AI工具_英文论文阅读工具
- 830岁迷茫?AI赛道,人生新起点_30岁学ai
- 9RabbitMQ、Kafka对比(超详细),Kafka、RabbitMQ、RocketMQ的区别
- 10【EI会议征稿通知】第五届电子通讯与人工智能国际学术会议(ICECAI 2024)_ei会议2024征稿
当前位置: article > 正文
机械臂动力学参数辨识
作者:码创造者 | 2024-08-06 01:05:21
赞
踩
机械臂动力学参数辨识
不多说先上代码:https://github.com/lsk-gith/robot_dynamic_identify.git
动力学参数
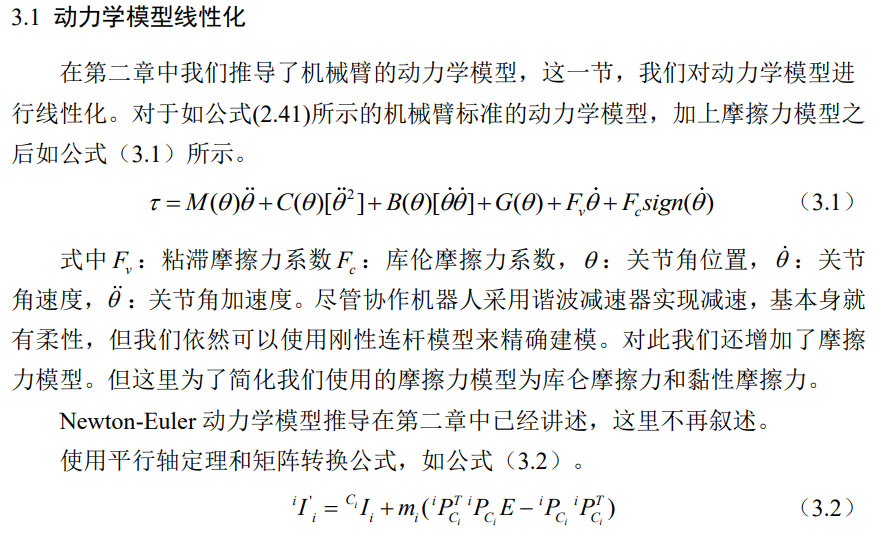
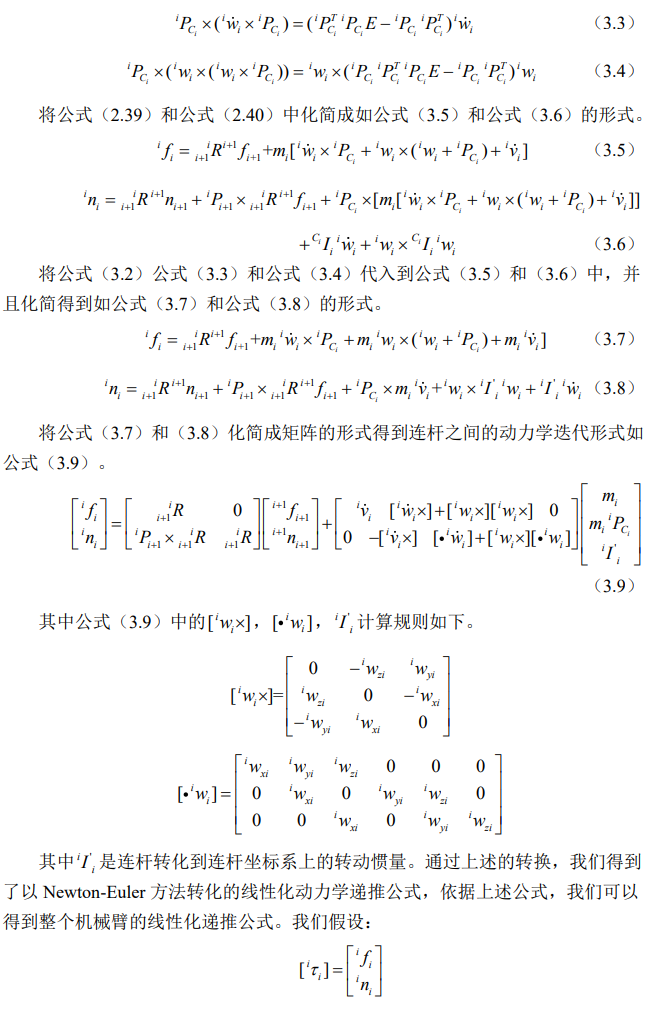
动力学参数一般是指转动惯量,质量,质心位置,这个三个组合起来有10个参数要辨识对于一个连杆来说,其中转动惯量是一个3X3的对称矩阵,所以是6个参数,质量m是一个参数,质心位置xyz是三个参数。
动力学参数辨识使用最小二乘法得到要辨识的参数,总体思想即使一个线性拟合的过程。
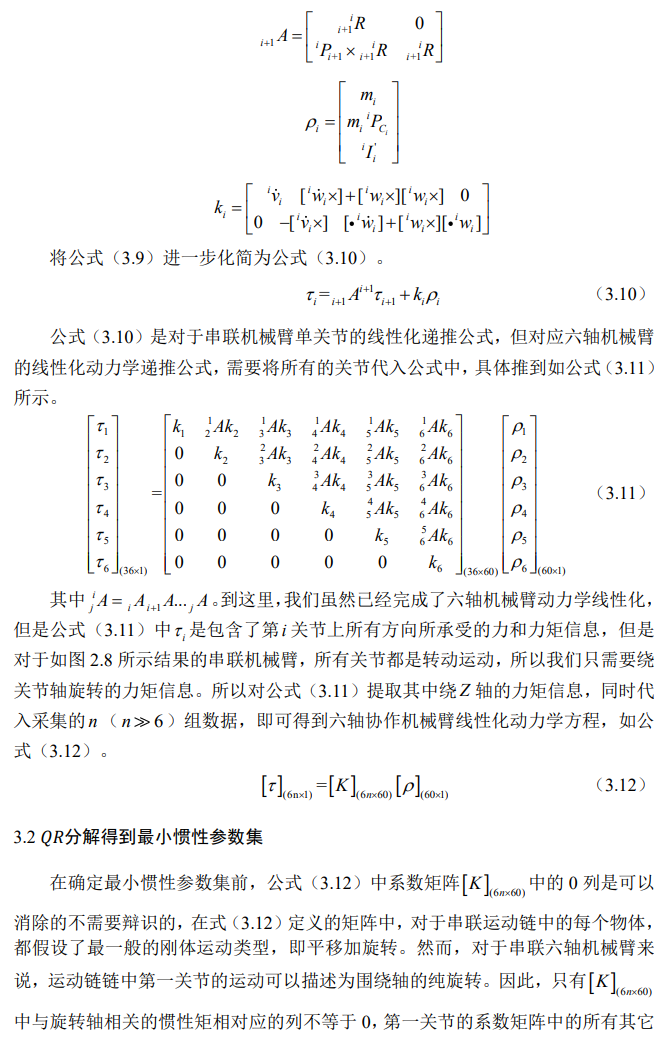
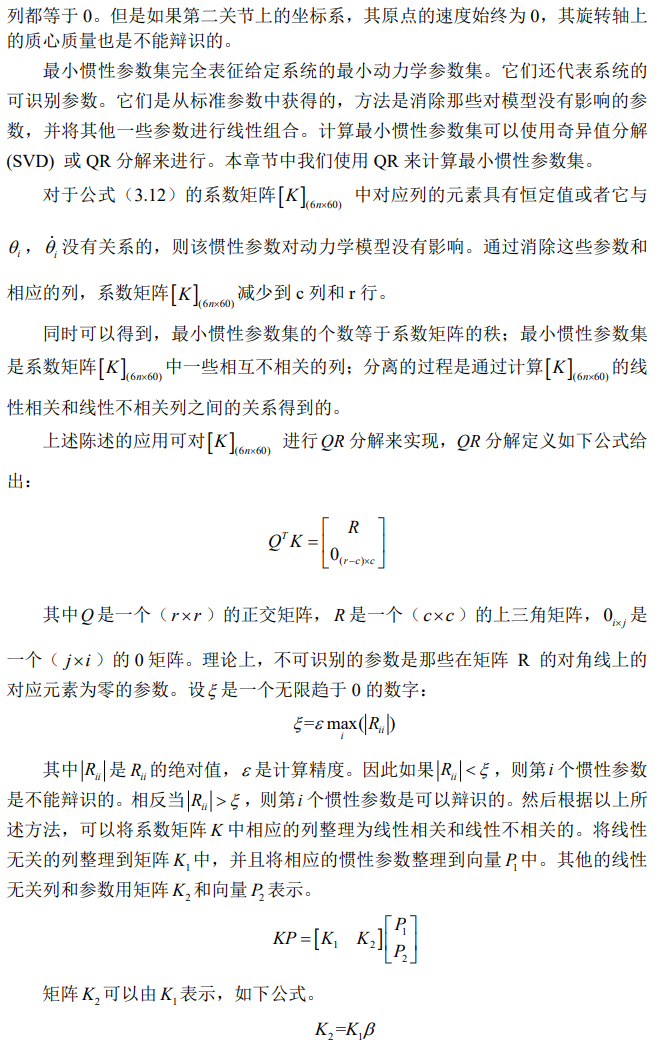
其中对于基于最小惯性参数集的MCG项分离工作,代码里面也有。
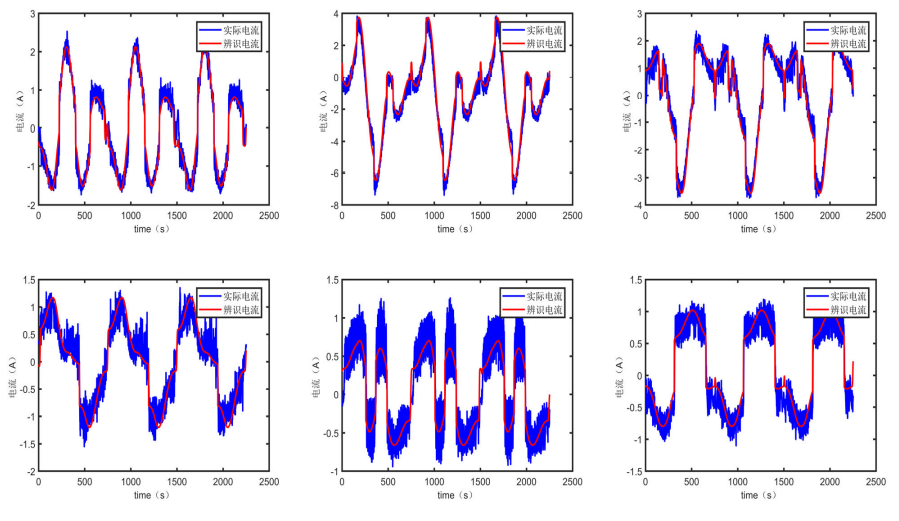
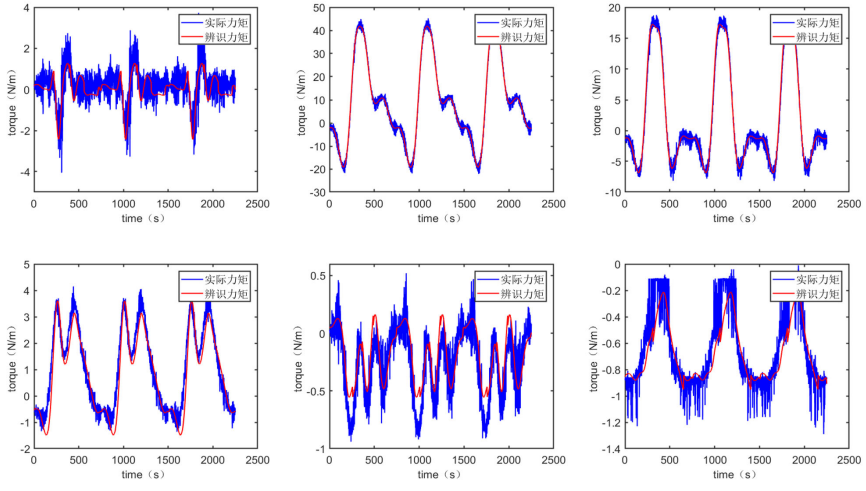
参数辨识结果对比
链接:https://pan.baidu.com/s/17HlzKa4OhyrnP9W5d5fgeg
提取码:vca3
声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/码创造者/article/detail/935126
推荐阅读
相关标签

