
热门标签
热门文章
- 1IDEA快速入门_intellij idea2020.3激活
- 2java实现的经典递归算法三例_经典递归算法java
- 3李德毅 | 人工智能看哲学
- 4手把手教你在云环境炼丹:Stable Diffusion LoRA 模型保姆级炼制教程_炼丹模型训练
- 5使用Python进行机器学习:从基础到实战
- 6[AI]文心一言出圈的同时,NLP处理下的ChatGPT-4.5最新资讯_chtagtp4.5
- 7android edittext显示光标不闪烁_单片机1602液晶屏显示 hello studet come to here
- 8uniapp 使用安卓模拟器运行调试_uniapp 安卓模拟器调试
- 9卡尔曼滤波和互补滤波的区别_互补滤波和卡尔曼滤波
- 10如何短时间通过2022年PMP考试?_pmp考试总结2022
当前位置: article > 正文
C++OpenCV系统学习(8)——图像边缘填充、边缘提取、边缘检测_c++ opencv 扩充图像边界
作者:码创造者 | 2024-07-04 14:18:34
赞
踩
c++ opencv 扩充图像边界
1.图像边缘填充
1.1卷积边界问题
图像卷积的时候边界像素不被卷积操作,原因在于边界像素没有完全跟kernel重叠,只有当3X3的滤波时候有一个像素的边缘没有被处理,5x5滤波的时候有两个像素边缘没有处理。
1.2.处理边缘
在卷积开始之前增加边缘像素,填充的像素值为0或者RGB黑色,比如3x3在四周各填充1各像素的边缘,这样就确保图像的边缘被处理,在卷积处理hi后再去掉这些边缘,openCV中默认的处理方式就是:BORDER_DEFAULT,此外还有常用
- BOEDER_CONSTANT-填充边缘用指定像素
- BOEDER_REPLICATE-填充边缘像素用已知的边缘像素
- BOEDER_WRAP-用另外一边的像素来补充填充
1.3.给图像添加边缘的API
- copyMakeBorder(
- Mat src,//输入图像
- Mat dst,//添加边缘图像
- int top,//边缘长度,一般上下左右都取相同值
- int bottom,
- int left,
- int right,
- int borderType//边缘类型
- Scalar value
-
- )
1.4代码
- void MyApi::image_edge_processing(Mat& image)
- {
- //每半秒中图像的边缘就会变化一次,我们也可以通过按键选择变化的类型
- Mat dst;
- int top = (int)(0.05 * image.rows);
- int bottom = (int)(0.05 * image.rows);
- int left = (int)(0.05 * image.cols);
- int right = (int)(0.05 * image.cols);
- RNG rng(12345);
- int borderType = BORDER_DEFAULT;
-
- int c = 0;
- while (true)
- {
- c = waitKey(500);
- //ESC
- if ((char)c == 27)
- {
- break;
- }
- if ((char)c == 'r')
- {
- borderType = BORDER_REPLICATE;
- }
- else if ((char)c == 'w')
- {
- borderType == BORDER_WRAP;
- }
- else if ((char)c == 'c')
- {
- borderType == BORDER_CONSTANT;
- }
- Scalar color = Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255));
- copyMakeBorder(image, dst, top, bottom, left, right, borderType, color);
- imshow("OUTPUT", dst);
- }
-
- }

2.图像边缘提取——卷积的应用

边缘:
- 边缘是什么:是像素值发生跃迁的地方,是图像的显著特征之一,在图像特征提取、对象检测、模式识别等方面都有重要的作用。
- 如何捕捉/提取边缘——对图像求他的一阶导数,delta = f(x)-f(x-1).delta越大说明像素在方向变化越大,边缘信号越强
- 我们可以选择利用一些算子如Sobel算子等
2.1Sobel算子
- 是离散微分算子,用来计算图像灰度的近似梯度
- Sobel算子功能集合高斯平滑和微分求导
- 又称为一阶微分算子(Laplace是二阶算子),求导算子,在水平和垂直两个方向上求导,得到图像x方向与y方向梯度图像

水平梯度在水平方向乘以2为了扩大水平方向差异,垂直方向同理。
改进版本的Sobel算子:

相关的API
- cv::Sobel(inputArray src,OutputArray dst,
- int depth,//输出图像深度
- int dx,//x和y方向的几节导数,选择1
- int dy,
- int ksize,//Sobel算子kernel大小,必须是1,3,5,7
- double scale=1
- double delta =0
- int borderType = BORDEDR_DEFAULT
- )

深度一般选择CV_8U中的 CV_16S或者CV_32F
步骤:
- 高斯平滑
- 转灰度
- 求梯度,分别在x和Y方向上的
- 振幅图片(综合X和Y方向上的)
- void MyApi::image_edge_extract(Mat& image)
- {
- Mat gray_image, dst;
- GaussianBlur(image, dst, Size(5, 5), 0, 0);
- cvtColor(dst, gray_image, COLOR_BGR2GRAY);
- Mat xgard, ygrad;
- Sobel(gray_image, xgard, CV_16S, 1, 0, 3);
- Sobel(gray_image, ygrad, CV_16S, 0, 1, 3);
- //convert(ScaleAbs());
- //必须取绝对值不然看不见效果
- convertScaleAbs(xgard, xgard);
- convertScaleAbs(ygrad, ygrad);
- //x方向梯度
- imshow("xgrad", xgard);
- //y方向梯度
- imshow("ygrad", ygrad);
-
- //xy方向梯度
- Mat xygrad;
- addWeighted(xgard, 0.5, ygrad, 0.5,0,xygrad);
- imshow("xygrad", xygrad);
- }

2.2Laplace算子
2.2.1概述


2.2.2处理流程
-
高斯模糊去噪声GaussianBlue()
-
转换为灰度图像cvtColor()
-
拉普拉斯二阶导数计算Laplacian()
-
取绝对值convertScaleAbs()
-
显示结果
- void MyApi::image_edge_extraxt_Laplance(Mat& image)
- {
- Mat gray_image, edge_image, dst;
- GaussianBlur(image, dst, Size(3, 3), 0, 0);
- cvtColor(dst, gray_image, COLOR_BGR2GRAY);
- Laplacian(gray_image, edge_image, CV_16S, 3);
- convertScaleAbs(edge_image, edge_image);
- imshow("output", edge_image);
- }

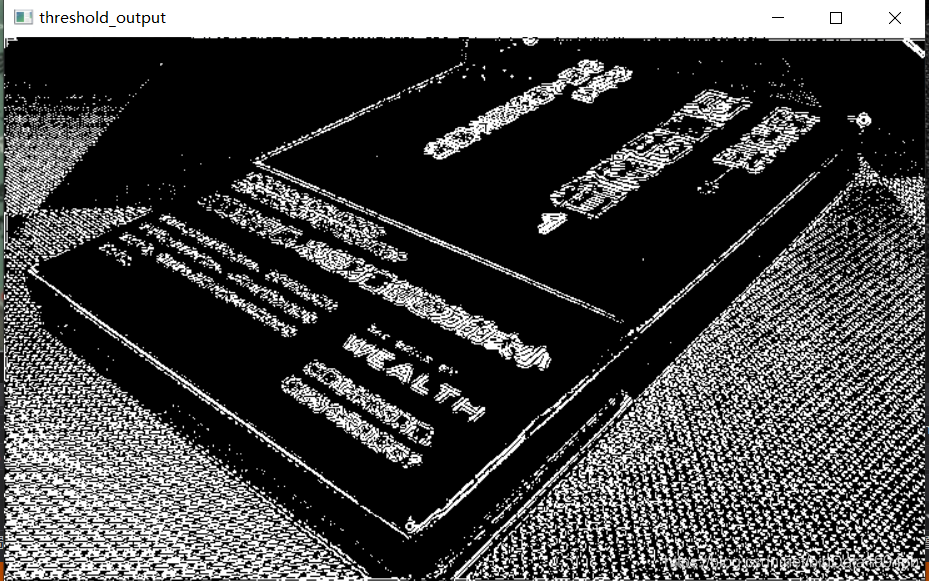
为了让效果更佳的明显我们选用了二值化操作:
图像的二值化就是将图像上的像素点的灰度值设置为0或255,这样将使整个图像呈现出明显的黑白效果。在数字图像处理中,二值图像占有非常重要的地位,图像的二值化使图像中数据量大为减少,从而能凸显出目标的轮廓。OpenCV中提供了函数cv::threshold();
加一句:

通过二值化后:
 3.Canny边缘检测
3.Canny边缘检测
3.1概述
Canny1986年提出的是边缘检测算法,是一个很好的边缘检测器,很常用的图像处理方法
3.2步骤
- 高斯模糊-GaussianBlur
- 灰度转换-cvtColor
- 计算梯度-Sobel/Scharr
- 非最大信号抑制
- 高低阈值输出二值图像
3.3非最大信号一抑制
3.4高低阈值输出二值图像

3.5相关API
- Canny(
- InputArray src,
- OutputArray edges,
- double threshold1,//低阈值,常取高于之的1/2或者1/3
- double threshold2,//高阈值
- int aptertureSize,//Sobel算子的size,通常3x3取值为3
- bool L2gradient//选择true表示L2来归一化,否则用L1来归一化
- )

声明:本文内容由网友自发贡献,不代表【wpsshop博客】立场,版权归原作者所有,本站不承担相应法律责任。如您发现有侵权的内容,请联系我们。转载请注明出处:https://www.wpsshop.cn/w/码创造者/article/detail/787159
推荐阅读
相关标签

