
- 1编译安装httpd服务器以及优化、添加系统服务、apache简介
- 2Yum 和 Rpm 安装包管理软件的区别 - 分布式网络包仓库管理 - 手动包管理_rpm,yum异同点
- 3LLM 大模型学习必知必会系列(六):量化技术解析、QLoRA技术、量化库介绍使用(AutoGPTQ、AutoAWQ)_pip install autoawq
- 4eclipse c语言插件6,在Eclipse中添加C/C++插件(示例代码)
- 5Android实现视频剪切、视频拼接以及音视频合并_android studio视频裁剪和合并开发项目
- 6Python中文件操作(IO流)及文件备份_python 保存文件流
- 7有的学前端说没练手项目呢?web前端10个新手项目列表学完可上手
- 8hive中的空值处理函数 nvl、 nvl2、if、 coalesce
- 9逆向工程实验Lab0_orqf
- 10虚拟化管理平台的选择:开源软件 or 商业软件?_opennebula
西门子PLC1200伺服库卡机器人12工位博图程序例程与昆仑通态触摸屏组态,PDF电路图参考,详细中文注释,设备操作说明,物料BOM,PLC与库卡机器人profinet通讯,PTO模式控制松下伺服,拥_博图1200和总线控制伺服显示lockout
赞
踩
西门子PLC1200伺服库卡机器人12工位博图程序例程,组态采用昆仑通态触摸屏,详细中文注释,PDF电路图参考,设备操作说明,物料BOM ,PLC和一台库卡机器人profinet通讯
PTO模式控制松下伺服
一共36路模拟量
12路模拟量压力检测
12路模拟量位置检测
12路模拟量压力输出
连接26个温控器485总线通讯
ID:365674494480333
汇科自控
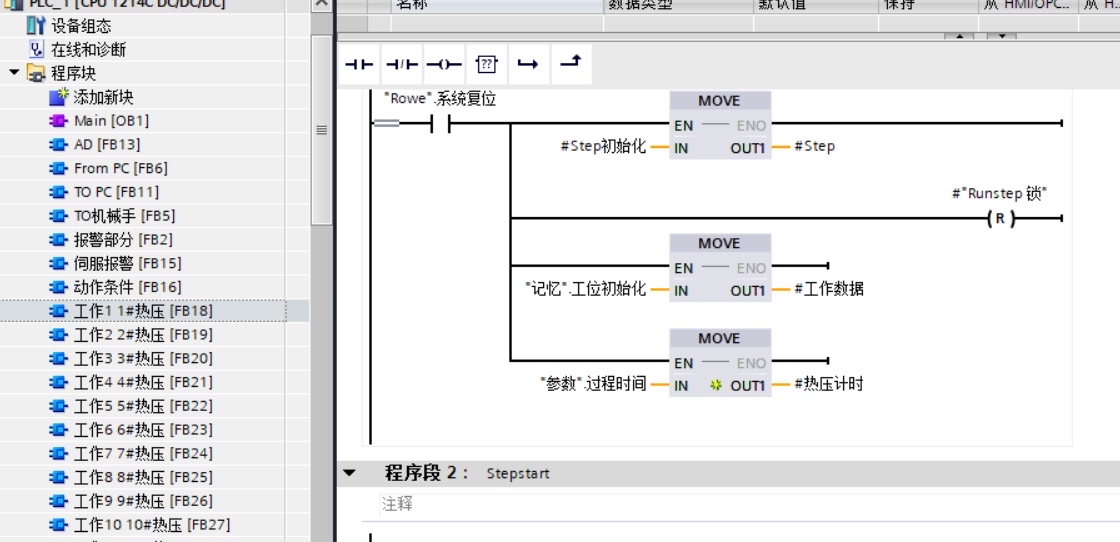

西门子PLC1200伺服库卡机器人12工位博图程序例程,组态采用昆仑通态触摸屏,详细中文注释,PDF电路图参考,设备操作说明,物料BOM ,PLC和一台库卡机器人profinet通讯。
在现代制造行业中,自动化技术的应用越来越广泛。其中,以西门子PLC1200为代表的可编程逻辑控制器(PLC)和以库卡机器人为代表的工业机器人已成为工厂自动化的关键装备。本文将围绕西门子PLC1200伺服库卡机器人12工位博图程序例程展开,详细介绍其组态采用的昆仑通态触摸屏,以及相关的技术要点。
首先,让我们来了解一下西门子PLC1200。作为西门子工控产品系列中的一员,PLC1200具有高性能、灵活可靠的特点。它采用了先进的控制算法和通讯协议,能够实现复杂的控制任务。结合库卡机器人的卓越机械性能,PLC1200可以为各种工业自动化应用提供强大的支持。
接下来,我们将重点介绍库卡机器人。作为一种多关节可编程机器人,库卡机器人具有高精度、高可靠性和高效率的特点。在这个例程中,库卡机器人被应用在12个工位上,实现了一系列复杂的自动化任务。通过PLC1200和库卡机器人之间的profinet通讯,实现了数据的快速传输和实时控制。
与此同时,为了确保系统的稳定和安全,本例程还采用了PTO模式控制松下伺服。伺服技术可以提供更高的控制精度和响应速度,使得机器人的运动更加精准和平稳。通过36路模拟量的采集和控制,系统可以实时监测和调整工作过程中的压力和位置,以确保工作质量和生产效率。
另外,本例程还连接了26个温控器,采用485总线通讯。温控器的应用可以实现对生产过程中的温度进行精确控制,从而保证产品质量。通过总线通讯,温控器可以与PLC1200进行高效的数据交换,实现对温度参数的实时监测和调整。
最后,本例程还提供了详细的中文注释、PDF电路图参考、设备操作说明和物料BOM。这些文档可以帮助工程师更好地理解和操作系统,减少故障和误操作的风险。同时,这些文档也为系统的维护和升级提供了便利。
综上所述,本文围绕西门子PLC1200伺服库卡机器人12工位博图程序例程展开,介绍了系统的组态方案、核心技术要点以及相关的文档支持。通过该例程的应用,工厂可以实现高效、精确和可靠的自动化生产,提升生产效率和产品质量。希望该例程能够为广大工程师提供参考和借鉴,推动工业自动化技术的发展。
相关的代码,程序地址如下:http://matup.cn/674494480333.html


